
本文探讨军事机器人学、安全数据传输与可靠导航系统的交叉领域。该导航系统专为迷宫穿越而设计,允许操作员通过Matlab函数设定起始点和终点。从位于地形上方的摄像头获取的导航数据,通过S视频输入传输至个人电脑,启动基于Matlab的导航算法。研究强调网络安全与精确导航,在LoRa通信设备中集成了加密方法,并在安全的机器人操作系统中实施了抗量子算法。一种图像处理算法有助于迷宫内的路径规划,并对当代技术进行了全面概述。文中包含了无线机器人导航系统和迷宫加密算法的视觉呈现,以增强清晰度。
随着军事机器人学的快速发展,对鲁棒的导航系统和安全数据传输的需求日益凸显,尤其是在网络威胁不断升级的背景下。本文聚焦于不断发展的无人军用移动机器人领域,特别强调密码学与导航系统的集成。我们提出的导航框架依赖于操作员在迷宫中通过Matlab函数定义的航点。位于机器人运行的黑白二维迷场上方的摄像头,在其视场内捕获导航数据。利用电视卡的S视频输入,摄像头的数据被传输至个人电脑,在那里一个基于Matlab的导航算法将XBee发送设备初始化为串行端口。本次讨论强调了提升网络安全与确保精确导航的双重重点。加密技术在LoRa通信设备中得到应用,并在安全的机器人操作系统中集成了抗量子算法作为补充。一个关键亮点是用于迷宫路径规划的图像处理算法。操作员定义初始点和终点,由摄像头捕获黑白迷宫图像。Matlab处理此图像,生成一系列勾勒路径的点。这些坐标存储在一个数据向量中,使机器人能够沿着预定路径行进。本文不仅探讨了网络安全的复杂性,还研究了实现精细导航的方法。它对该领域的当代技术与方法进行了全面的综述。图1和图2分别直观展示了无线机器人导航系统和迷宫加密算法的实现。
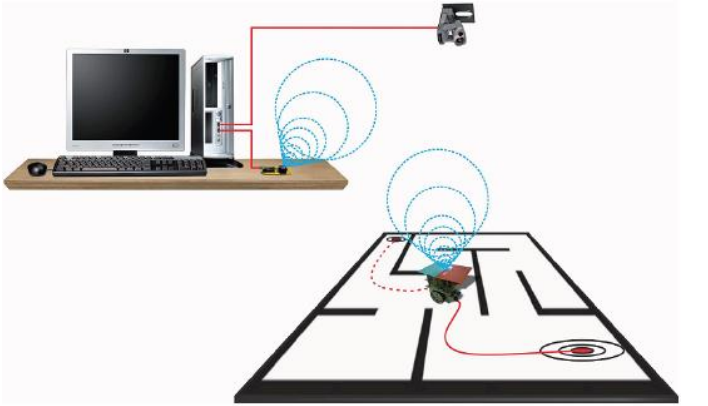
图1:已实现的无线机器人导航系统
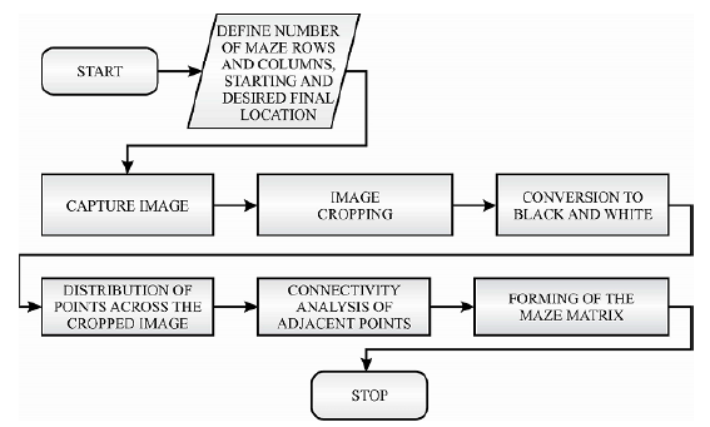
图2:迷宫加密算法流程图
成为VIP会员查看完整内容
