随着5G网络和无线通信等新兴技术的出现,自动驾驶汽车(automated vehicles, AVs)有望越来越多地为旅行者提供服务,并提供大量好处,如增强交通稳定性、减少能源消耗、优化停车位分配等。随着人类驾驶汽车(HVs)逐渐被自动驾驶汽车(AVs)取代,汽车市场将迎来一个过渡期。在这一过渡过程中,预计将出现许多机遇和挑战。为了更好地为自动驾驶汽车的到来做好准备,本文旨在从控制理论的角度,在未来交通系统的规划、运行和管理的背景下,解决车辆自动化带来的有趣而紧迫的问题。鉴于过渡时期HVs和AVs不可避免的共存,本文建立了一个连续时间的动态模型,以捕捉这两类车辆市场份额的交互时序演化。建立了一个离散的选择模型,并将其融入到动态模型中,用于描述客户选择HVs或AVs的可能性。为了实现自动驾驶汽车在时间上融入汽车市场,将货币补贴和对自动驾驶汽车专用基础设施的投资作为促进自动驾驶汽车采用的决策变量。进一步,建立了一个最优控制问题,目标是在任何给定的有限规划期限结束时实现期望的市场渗透率(MPR),同时最小化自动驾驶补贴和基础设施投资的成本。通过求解形式化的优化问题,确定了时间依赖的最优自动驾驶集成策略,允许政府机构以自适应方式补贴自动驾驶购买和投资于未来的交通基础设施。所提出的方法在各种需求模式下,如增加、减少和随机需求下都是有效和鲁棒的。通过系统的成本效益分析和灵敏度分析,评估自动驾驶系统集成的可取性。研究结果为政府机构制定自动驾驶系统整合的长期战略规划政策提供了重要的管理见解。尽管适当的激励政策可能会加速自动驾驶汽车的采用,但预计在未来30年左右的时间里,MPR将保持相对较低的水平,导致主要由人类驾驶的混合交通流,包括HVs和自动驾驶汽车。由于驾驶员的集体行为,均匀交通流在某些流型中已被证明是不稳定的,导致了观察到的走走停停的波动。即使在没有合并、瓶颈或换道的情况下,这些交通波也会出现,并可能导致更多的能源消耗和排放。利用车辆自动化的优势,本文开发了一种方法,通过在以人为主导的交通流中对一小部分自动驾驶汽车进行最优控制,来平滑不稳定的交通流。这些受控自动驾驶汽车在混合自主交通中充当移动执行器,而不会改变人类视觉系统的正常运行方式。我们建立了一个通用的框架来描述混合交通流及其动力学,它遵循车辆跟驰原则。基于该框架,以最小化速度干扰为目标,综合了自动驾驶汽车的最优反馈控制器,从而实现了更平滑的交通。根据Pontryagin极小值原理所规定的最优性必要条件,提出了一种确定最优AV控制策略的计算算法。通过HVs和AVs的智能驾驶员模型(IDM)和最优相对速度(OVRV)模型进一步说明了所提方法的总体框架,以验证所提方法在交通平滑、燃油经济性和尾气排放方面的有效性。
**虽然上述综合的最优AV控制器在平滑不稳定的混合交通上是有效的,但其在改善交通稳定性方面的性能尚未得到分析证明,并且在相当保守的情况下保证车辆跟驰安全性。**为解决这些具有挑战性的问题,本文利用非线性稳定性理论为AVs合成合适的反馈控制器。具体地说,我们感兴趣的是以一般函数形式分析综合自动驾驶汽车的适当反馈控制器来平滑非线性混合交通,涵盖了文献中常见的一类广泛的确定性汽车跟随模型。基本上,自动驾驶汽车的控制方式是,它们紧密跟踪虚拟速度剖面,即由前一辆汽车产生的干扰的微妙版本。因此,在受控自动驾驶汽车之间反向传播时,交通波会减少。基于车辆跟驰动力学的一般函数形式,推导出了一类有效的可加性AV控制器,被证明能够确保速度跟踪的收敛,导致交通更加顺畅。此外,还设计了一组保证车辆跟驰安全的充分条件。值得注意的是,与许多现有研究不同,所合成的反馈控制器只需要局部交通信息,而不需要依赖于高度的车辆连通性,并且交通平滑率易于调整,这对实际实现是有用的。以理论IDM和商业上可用的自适应巡航控制(ACC)车辆为例,进一步说明了所提出的方法。
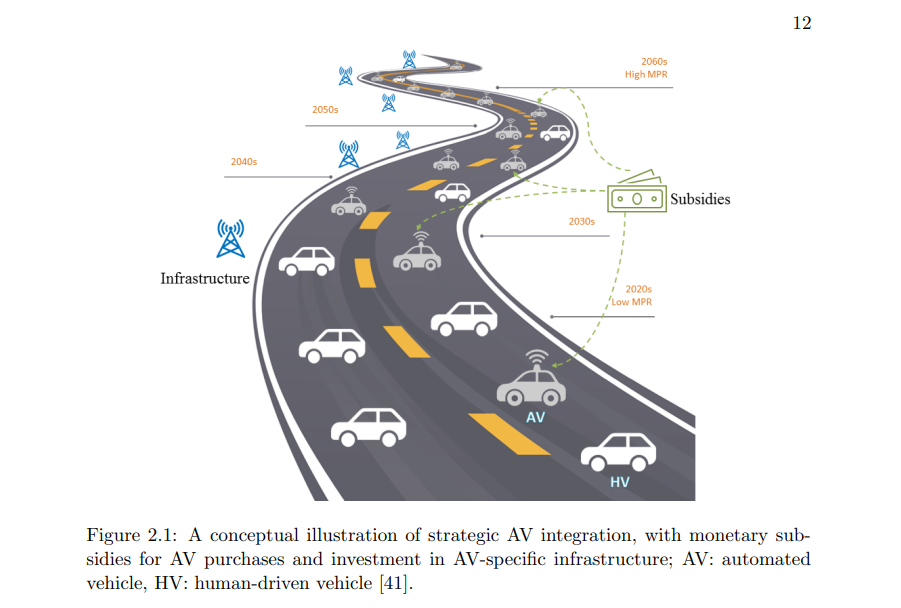
**尽管自动驾驶汽车带来了如上图所示的增强交通稳定性等好处,但新兴的自动驾驶技术为网络攻击打开了大门,其中一些选择的自动驾驶汽车以对抗性的方式驾驶。**这可能导致交通拥堵和车辆燃油消耗在全网范围内的增加,降低交通系统的性能。因此,随着AVs逐渐成为现实,为AVs制定有效的攻击缓解策略至关重要。为此,本文推导了网络攻击情况下自动驾驶汽车的最优反馈控制律。值得注意的是,攻击只被假设有一个有界的规模(为了保持隐蔽性),而不受任何特定的概率分布,这不仅具有理论意义,而且放松了之前研究的假设。更重要的是,为了应对缺乏对恶意攻击的认知,我们首次建立了一个最小最大控制问题,以最小化在最坏情况下可能对流量造成的干扰。具体地,在混合自治流量框架下,考虑了针对自动驾驶系统的两类网络攻击,即针对传感器测量数据的虚假数据注入攻击和针对自动驾驶系统控制命令的恶意攻击。进一步,我们推导了最小最大控制问题最优性的必要条件,并基于此条件提出了一种迭代计算算法来确定AVs的最优控制(驱动)策略。通过数值仿真验证了所提方法的有效性,并考虑了不同的攻击严重程度。