现代无人机威胁需依托先进拦截策略应对复杂规避能力与对抗环境。传统单拦截器及非协同多拦截器方案存在固有缺陷:覆盖不足、追踪模式可预测、易受智能规避机动反制。本文提出"牧羊人网格"策略——基于群体行为协同的多阶段框架,通过系统性围困与协同打击实现确定性目标拦截。该策略实施四阶段作战模型(追踪/跟随/编组/交战),结合动态角色分配与自适应编队几何学,在保持持续目标压制的同时优化打击时机。核心创新含三大要素:基于目标距离与任务目标的自适应阶段转换机制、专设编队维持与打击执行的动态角色分配系统、适应目标运动模式的预测性编队几何算法。仿真实验显示其性能显著超越传统方案:拦截成功率提升至近完美水平(>95% vs 传统方案65%),中位拦截耗时同步缩减。
无人机(UAV)技术扩散正对军事、民用及关键基础设施构成严峻安全挑战。现代威胁场景中的高速敏捷目标能在三维空间实施不可预测规避机动,传统防御系统难以应对。拦截此类目标不仅需快速响应能力,更依赖实时适应动态威胁的精密协同机制。当前防御体系面临双重挑战:严苛资源约束下维持高拦截成功率,同时满足时效性决策要求。
传统拦截方法主要依赖集中式指挥结构与预设航迹,在现代威胁环境中存在根本局限:单拦截器方案因覆盖不足与交战窗口有限,难以应对高机动目标;现有多拦截器系统多采用直接追踪或基础编队飞行等简单协同策略,易被复杂规避机动反制。现有方法普遍缺乏行为自适应机制,无法根据目标特性与环境调整策略。集中式规划的计算开销更导致高速拦截场景中的致命延迟。
尽管集群控制与分布式系统新进展为协同拦截开辟新路径,当前方案仍受限于僵化协同协议与有限行为模式。多数集群方案聚焦固定几何编队维持,忽视目标行为动态特性与拦截器角色分化需求。现代方法缺乏层级决策结构导致资源分配低效与战略布防机会错失。现有系统在作战阶段转换时常出现覆盖空隙,危及关键交战窗口。
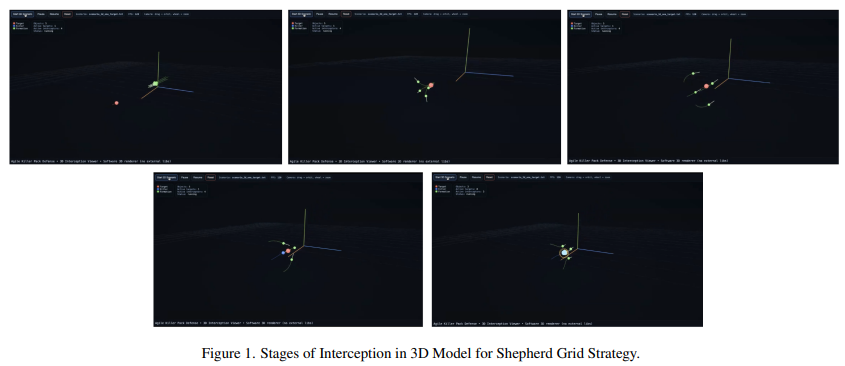
针对上述缺陷,本文提出"牧羊人网格"策略——融合自适应集群协同与智能角色分配的多阶段拦截框架。该方案引入仿生行为模型,使拦截单元动态切换四作战阶段:
- 追踪阶段:高速接近目标建立初始接触
- 跟随阶段:保持安全距离实施持续监控
- 编组阶段:构建动态包围网格压缩机动空间
- 交战阶段:协同实施致命打击
采用"集中-分布式"混合控制架构,平衡实时响应与战略协同:单元级自主决策与集群级协同机动并行。
本策略三大创新点确立其技术优势:
- 自适应阶段转换机制:根据目标距离与任务目标动态调整追踪行为,确保持续接战同时优化资源利用
- 动态角色分配系统:专设"主动拦截单元"实施打击、"牧羊单元"维持编队结构,通过层级架构实现协同定位与打击执行的概率最大化
- 预测性编队几何算法:基于实时航迹分析优化拦截器布阵,构建适应目标运动模式的移动式包围网格,维持多重交战矢量保障拦截成功率