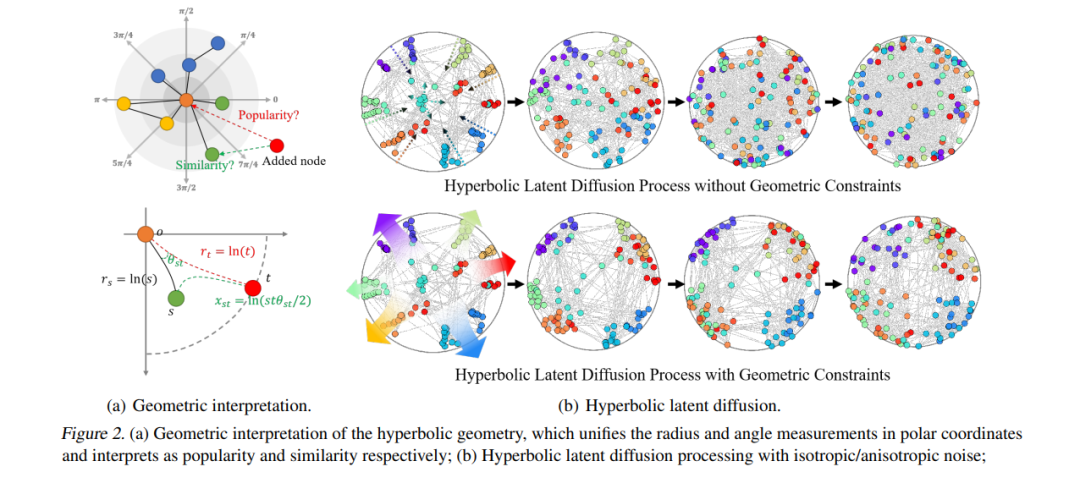
扩散模型在计算机视觉领域取得了重大进展,最近在社区内引发了对其在图生成中的应用的广泛兴趣。现有的离散图扩散模型表现出较高的计算复杂性和较低的训练效率。直接在潜在空间中扩散图是一种更优越且自然的方式。然而,由于图的非欧几里得结构在潜在空间中并不各向同性,现有的潜在扩散模型难以有效捕获和保留图的拓扑信息。
为了解决上述挑战,我们提出了一种新颖的几何潜在扩散框架 HypDiff。具体而言,我们首先基于双曲几何建立一个具有可解释性度量的几何潜在空间,以定义图的各向异性潜在扩散过程。然后,我们提出了一种受径向和角度几何属性约束的几何潜在扩散过程,从而确保在生成的图中保留原始拓扑属性。大量实验结果证明了 HypDiff 在生成具有不同拓扑结构的图方面的卓越效果。


标签
人工智能 市场分析 技术趋势 投资预测 生成式AI
一句话总结
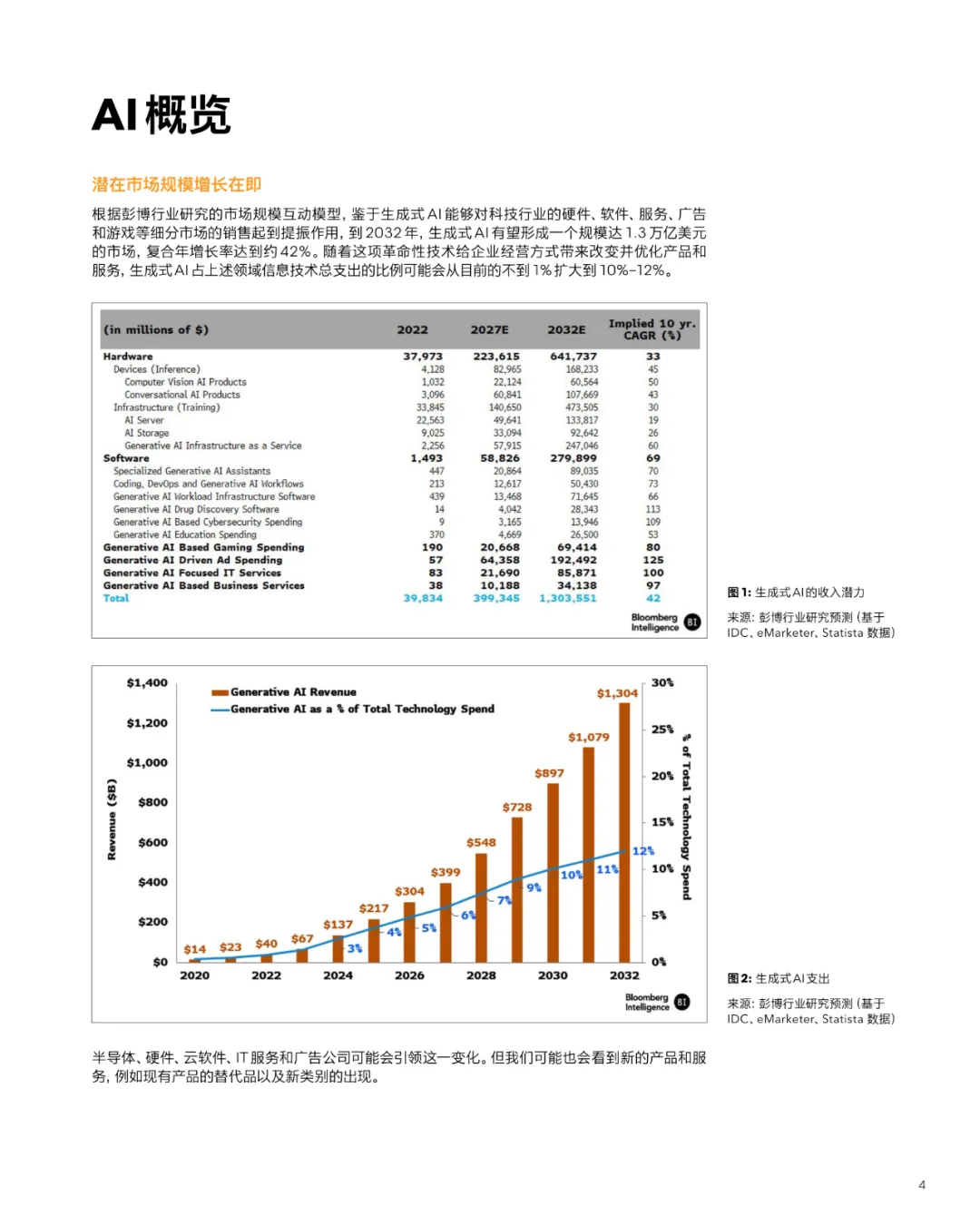
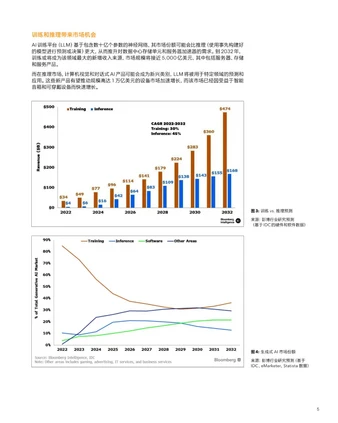
生成式人工智能(AI)和大型语言模型(LLM)的采用预计将在2032年创造1.3万亿美元的市场收入,对科技行业的多个领域产生深远影响,其中科技巨头、边缘设备制造商和CRM提供商将是主要受益者或面临挑战。
摘要
市场潜力与增长预测
- 彭博行业研究预测,到2032年,生成式AI将形成1.3万亿美元市场,年复合增长率约42%。
- 科技支出中生成式AI的占比有望升至10%-12%。
科技巨头与芯片制造商的受益
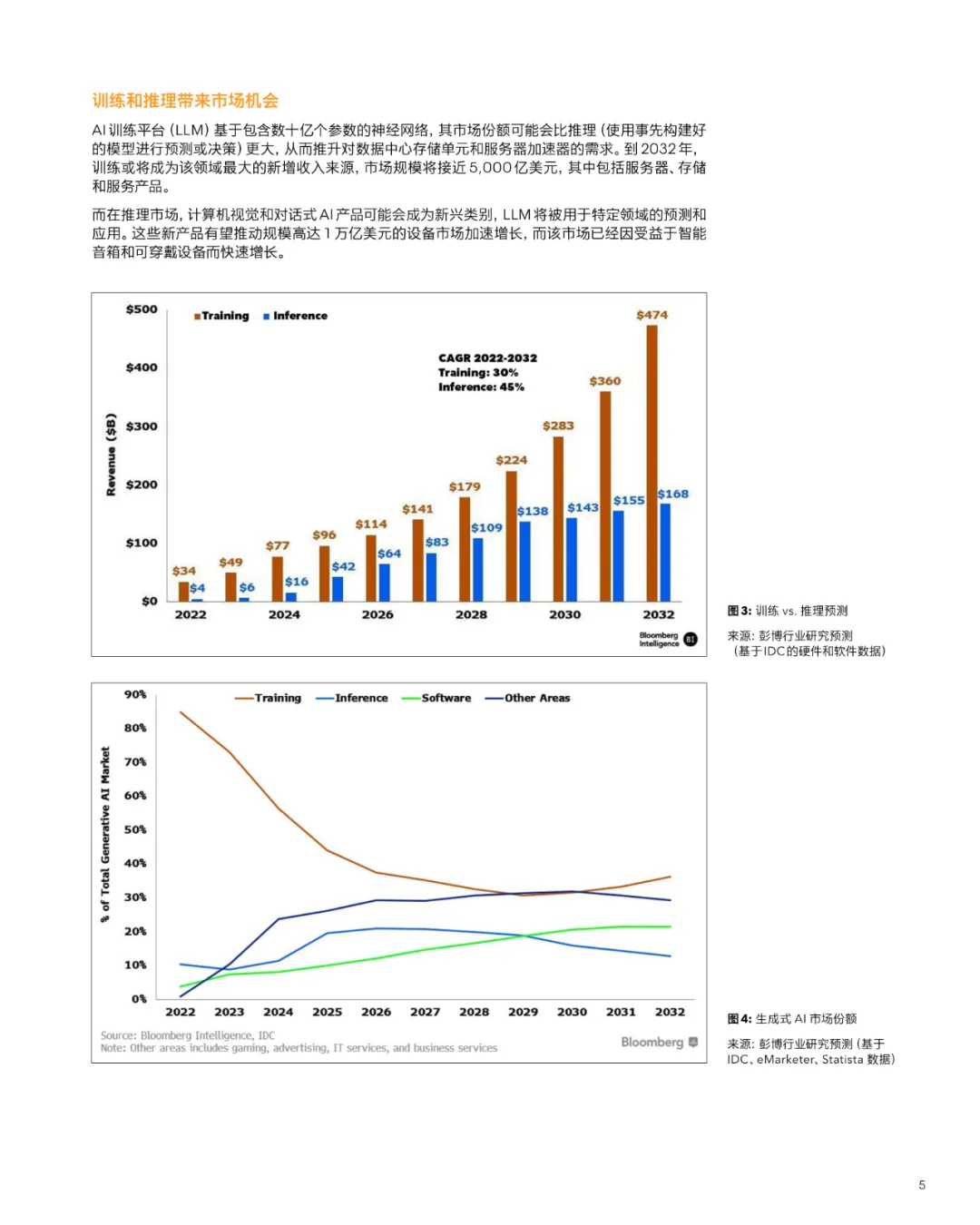
- 英伟达等半导体制造商将从AI训练相关的销售中受益,预计未来10年市场规模达4740亿美元。
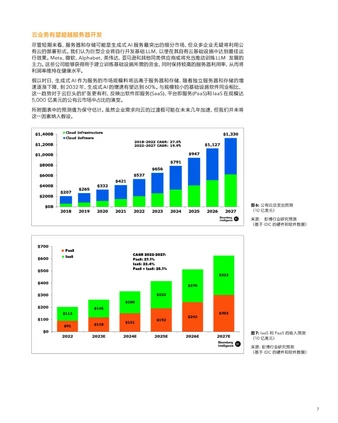
- 云服务巨头如微软、亚马逊和谷歌的增速预计将超过半导体行业。
设备需求与CRM提供商的挑战
- 边缘设备制造商如戴尔、苹果和特斯拉可能因AI相关产品需求增长而受益。
- 传统CRM提供商如Salesforce.com、SAP和Adobe可能面临新兴软件产品的挑战。
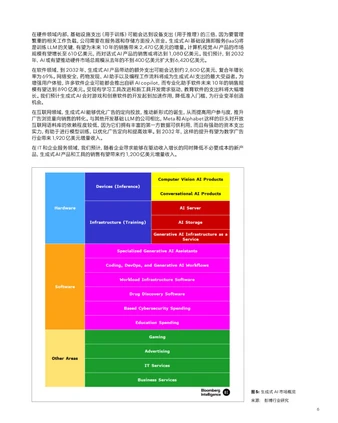
AI技术的应用领域
- AI技术将在网络安全、药物发现、AI助手、编程工作流和数字广告等领域有广泛应用。
资本支出与市场变革
- 企业将增加对硬件、软件、服务和广告等领域的投资,预计带来显著的收入增长。
监管格局与ESG展望
- 监管环境的变化,特别是欧盟的《AI法案》,将对AI市场的可信性和安全性产生影响。
业绩和估值
- AI主题篮子在2023年表现突出,英伟达等公司在AI训练硬件领域表现显著。
主要研究主题与催化剂
- 包括GPU和加速器芯片供应改善、基础LLM准确性提高、copilot附加功能费用收入增长等。
公司影响
- 详细分析了微软、亚马逊、Adobe、Alphabet、Meta和英伟达等公司在生成式AI领域的潜在增长和影响。
术语表与方法
- 提供了生成式AI相关术语的解释,并说明了彭博行业研究的预测方法和数据来源。
市场概览与预测
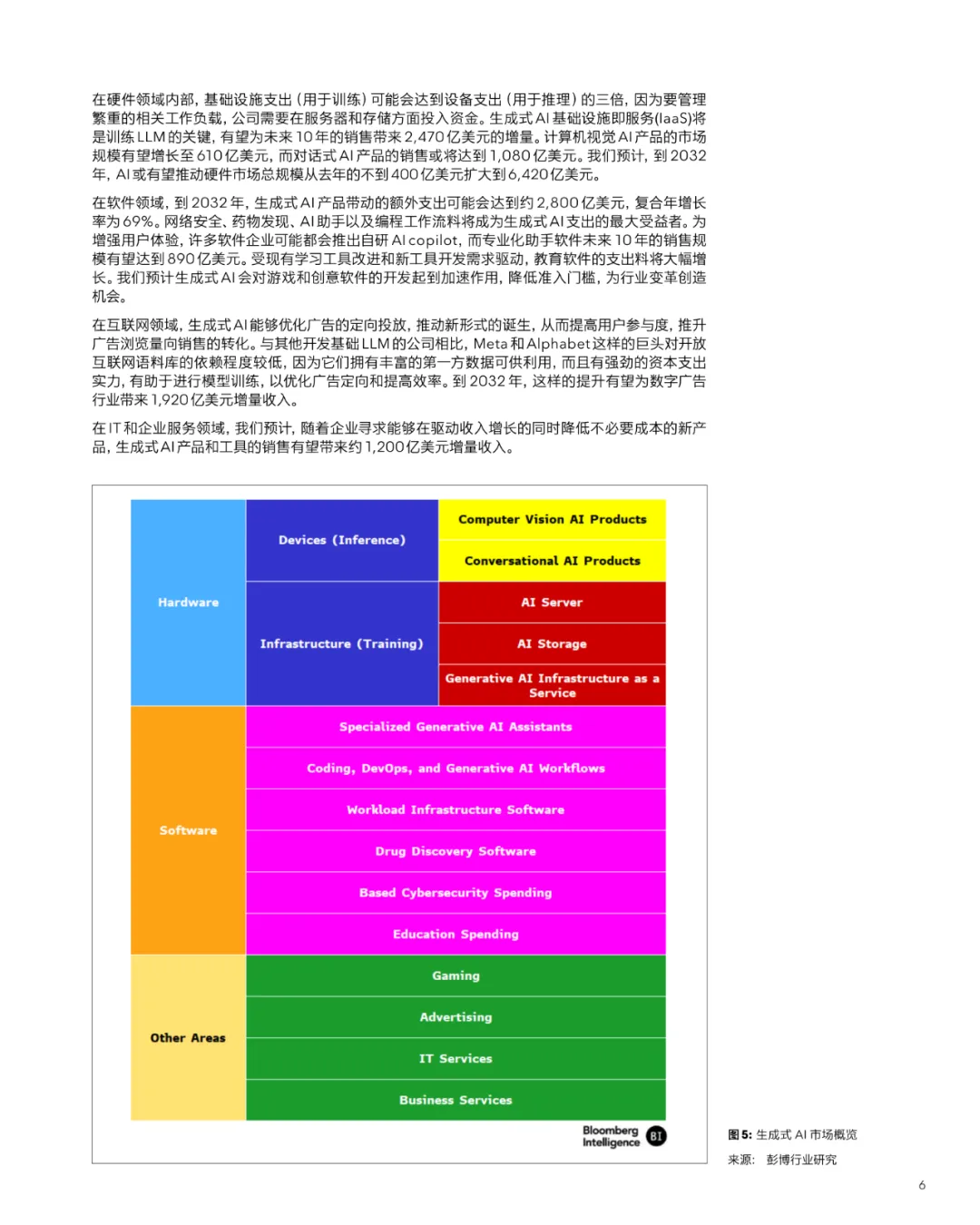
- 对生成式AI在不同细分市场的收入潜力进行了详细的预测和分析。
数字化转型与个人化技术
- 讨论了生成式AI如何推动数字化转型,以及个人化技术在设备更新周期中的作用。
资本支出与硬件需求
- 预测了AI对服务器、存储和内存芯片需求的增长,以及对相关半导体制造商的影响。
聊天机器人与个性化购物
- 分析了生成式AI如何转变聊天机器人为个性化购物助手,以及对数字广告支出的潜在影响。
监管动态
- 对欧盟和美国的AI监管动态进行了比较,预测了可能对科技巨头产生的风险。
环境、社会和治理(ESG)
- 讨论了AI在ESG方面的展望,包括能耗降低、知识产权和隐私保护。
业绩和估值
- 分析了AI主题在科技板块的业绩和估值情况,以及对未来增长的预期。





这本书适用于高级本科生和初级研究生,涵盖线性代数或抽象代数的理论方面,同时提供例子、计算和证明。《高级线性代数》探讨线性代数中的各种高级主题,突显其与几何、代数、分析、组合学、数值计算及其他数学领域之间的紧密联系。
作者首先通过章节介绍向量空间、排列、多项式以及其他代数结构的基本符号。接下来的章节大多相互独立,使得不同兴趣的读者可以直接跳到他们想要了解的主题。这种组织方式与许多抽象代数教材的组织方式不同,后者通常要求读者按章节顺序阅读。
每章都包含一个数学小插曲,专注于某个特定主题的发展。有些章节从深奥或抽象的角度审视入门材料,而其他章节则对更理论化的概念提供初步介绍。一些章节提供标准结果的独特视角或新颖处理。 书中涵盖了广泛的主题,从具体的矩阵理论(基础矩阵计算、行列式、正则矩阵、规范形式、矩阵分解、数值算法)到更抽象的线性代数(模、希尔伯特空间、对偶向量空间、双线性形式、主要理想域、通用映射性质、多线性代数)。
该书在基础计算线性代数和更高级、抽象的线性代数之间架起了一座桥梁,而后者在许多纯数学和应用数学领域中都非常需要。 关于作者 尼古拉斯·A·洛尔(Nicholas A. Loehr)于2003年在加州大学圣迭戈分校获得数学博士学位,在杰弗里·雷梅尔教授的指导下研究代数组合学。在宾夕法尼亚大学担任了两年国家科学基金会博士后之后,洛尔博士先后在威廉玛丽学院、美国海军学院和弗吉尼亚理工学院教授数学课程。洛尔博士发表了超过六十篇同行评审的期刊论文,并编写了三本关于组合学、高级线性代数和数学证明的教材。他教授的课程涵盖这些主题以及其他许多领域,包括密码学、向量微积分、现代代数、实分析、复分析和数论。






机器学习正迅速发展,既作为蓬勃发展的学术学科,又作为一种有潜力改变我们日常生活方方面面的技术。我们已经见证了语音生成、药物发现、推荐算法等领域的突破,这些都得益于机器学习的帮助。务必认识到,任何机器学习的实际应用不仅限于在经过清理的数据集上创建一个准确的模型。这些现实生活中的应用是复杂的软件系统,其中模型虽然重要,但只是一个组件。大量精力也花在创建数据收集和清理管道、质量保证、模型更新工作流、系统的监控和运维上。许多从业者的经验表明,将表现良好的机器学习模型转化为性能良好的机器学习系统并不容易。这篇论文试图了解这一转化过程中的痛点,并探索适合现代数据驱动系统需求的软件架构范式。
我们首先调查了现有关于机器学习部署的报告以及它们描述的困难。将识别出的问题与典型的机器学习部署流程相匹配后,我们发现没有单一的瓶颈,整个部署流程充满了挑战。我们认为,许多这些挑战是由现有的软件基础设施造成的,需要更多数据导向的方法来应对这些挑战。这一观察引出了本文的第二个贡献,即我们将数据导向架构(DOA)作为机器学习系统可能受益的有前途的软件架构范式加以考察。我们重点关注DOA在机器学习实际部署中的采用程度,尽管该范式本身相对不为人知,但其原则已广泛渗透到现代机器学习系统工程中。具体来说,我们将数据流架构确定为实现所有DOA原则的模式之一。
我们接下来评估了数据流架构在机器学习部署中的优势。评估分为两部分。在第一部分中,我们比较了在使用数据流和面向服务的方法实现的功能等效的应用代码库中部署机器学习模型的过程,后者作为基线。我们发现了数据流架构的一些优点,例如系统中更高的可发现性和更简单的数据收集。同时也识别了该范式的局限性。随后我们介绍了Seldon Core v2,这是我们根据数据流架构设计的开源模型推理平台。我们详细讨论了DOA原则如何在实践中实现,探讨了该平台的数据可观测性特性,并量化了其中涉及的性能权衡。
论文的最后一个贡献指出了数据流架构对软件开发的另一个好处:数据流软件与图形因果模型之间的紧密联系。我们发现数据流图和因果图之间的联系,并认为这种关系使得因果推理在数据流软件中的应用变得简单明了。我们以故障定位作为这一理念的具体例子,并在各种数据流系统和场景中展示它。
论文最后讨论了可以进一步发展社区对数据导向架构和数据流在机器学习系统中的理解和应用的研究方向。
视频基础模型(ViFMs)旨在为各种视频理解任务学习通用表示。通过利用大规模数据集和强大的模型,ViFMs通过从视频数据中提取稳健且通用的特征来实现这一目标。这篇综述分析了超过200个视频基础模型,提供了针对14种不同视频任务的基准和评估指标的全面概览,并将其分为3个主要类别。此外,我们还对最常见的6种视频任务的这些模型进行了深入的性能分析。我们将ViFMs分为三类:1)基于图像的ViFMs,将现有的图像模型应用于视频任务;2)基于视频的ViFMs,采用特定于视频的编码方法;3)通用基础模型(UFMs),在单一框架内结合多种模态(图像、视频、音频和文本等)。通过比较各种ViFMs在不同任务上的性能,这篇综述提供了有关它们优缺点的宝贵见解,为视频理解的未来进展提供指导。我们的分析结果令人惊讶地发现,基于图像的基础模型在大多数视频理解任务上始终优于基于视频的模型。此外,利用多模态的UFMs在视频任务上表现出色。我们在以下地址分享了这项研究中所分析的ViFMs完整列表:https://github.com/NeeluMadan/ViFM_Survey.git
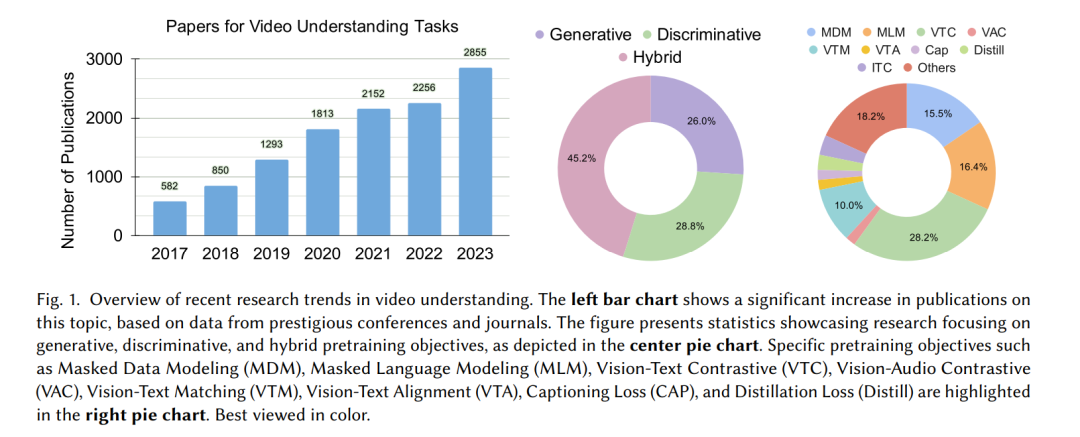
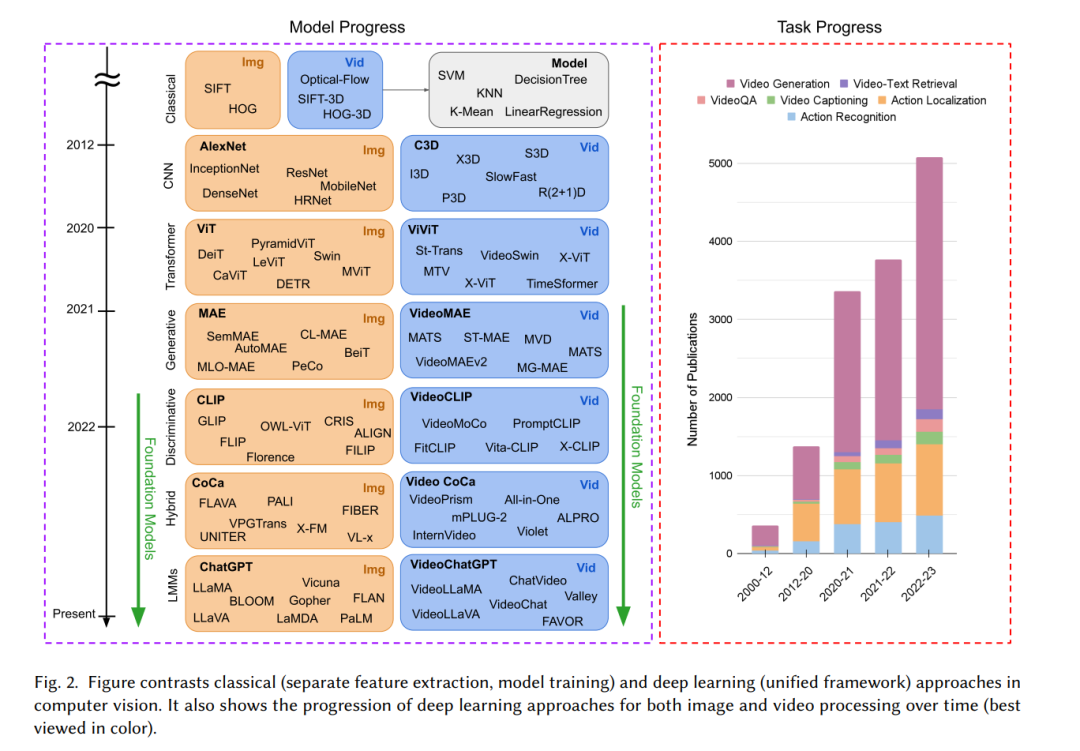
强大的计算资源的日益普及和不断增长的数据集推动了基础模型的发展[10, 24]。这些多功能的AI模型使用自监督学习或半监督学习在海量数据上进行训练,可以通过微调用于各种下游任务。最初的成功集中在静态图像上[123, 238],例如CLIP[238]和SAM[139]等模型都取得了令人印象深刻的成果。最近的研究[322, 352]已将这一成果扩展到视频领域,开发出了几种针对视频基础模型(ViFMs)的预训练策略。 尽管视频分析和生成数十年来一直是计算机视觉社区关注的焦点[19, 30, 134, 142, 278, 281],但由于任务的复杂性、额外的时间维度以及数据量庞大,这一问题在很大程度上一直具有挑战性。最初开发的方法主要基于使用标准图像分析技术处理各个帧并在其上加入时间维度[30, 80]。或者,专为视频设计的更高级技术也被开发出来,例如3D卷积[338]、循环网络、光流的使用以及Transformers[7, 19],直接作用于视频,从而提供更好的时间建模。此外,针对增强视频理解的多模态角色的研究也有显著发展[111, 245]。 我们在ViFMs的发展中也看到了类似的趋势,延续了图像(基于图像的ViFMs)、独立的视频建模(基于视频的ViFMs)以及结合额外模态(例如自动语音识别(ASR))(通用基础模型,Universal FMs)的路径。 动机和贡献:视频理解领域正在经历显著的进步,这可以从日益增长的专注于各类视频理解任务的研究论文数量中看出(图1)。这种增长与大规模预训练技术的发展相吻合。这些技术在适应不同任务方面表现出非凡的能力,只需最少的额外训练即可实现强大的泛化。因此,研究人员正在积极探索这些基础模型在解决各种视频理解挑战中的作用。为了在这个快速发展的研究领域中导航(见图2),对视频理解模型进行系统的综述是必要的。我们试图通过对用于视频理解任务的基础模型进行全面分析来填补这一关键空白。我们希望这篇综述能够为视频理解相关的未来研究方向提供路线图。
我们综述的主要贡献: * 本文首次对部署于各种视频理解任务的基础模型(ViFMs)进行了全面的综述。我们将ViFMs分为三类:1)基于图像的ViFMs:仅在图像数据上进行训练。2)基于视频的ViFMs:在训练期间利用视频数据。3)通用基础模型(UFMs):在预训练期间结合多种模态(图像、视频、音频、文本)。 * 我们独特地根据视频理解任务中对时间维度的涉入程度对其进行了分类。此外,还提供了与每个分类任务相关的数据集和评估指标的详细列表。 * 我们对每个类别的ViFMs进行了全面的比较,分析了各种研究成果。这一分析揭示了有关最有效的ViFMs在不同视频理解任务中的宝贵见解。 * 本综述进一步指出了ViFMs面临的关键挑战,强调了需要进一步研究关注的开放性问题。此外,我们讨论了ViFM开发的有前景的未来方向,为视频理解的进步铺平道路。
相关综述:尽管一些综述深入探讨了特定的视频理解任务[353, 366]或图像的基础模型[10],如Shiappa等人[252]提供了关于自监督视频理解方法的详尽综述,但近年来这一领域已经发生了显著变化。随着大规模基础模型的兴起,需要对这些模型在视频理解背景下进行全面的综述。据我们所知,我们的综述是第一个提供用于视频理解的基础模型的全面概述。 论文组织结构:在论文的第一部分(第2节),我们涵盖了从视频分类到生成的各种视频分析任务。我们讨论了广泛使用的架构和损失函数,以及与大规模预训练相关的数据集。接下来,我们解释了ViFMs的主要类别,即:基于图像的ViFMs(第3节)、基于视频的ViFMs(第4节)和通用基础模型(UFMs)(第5节)(有关分类法请参见图5)。最后(第6-7节),我们比较并讨论了所介绍模型的性能,并展示了该领域的挑战和未来方向。



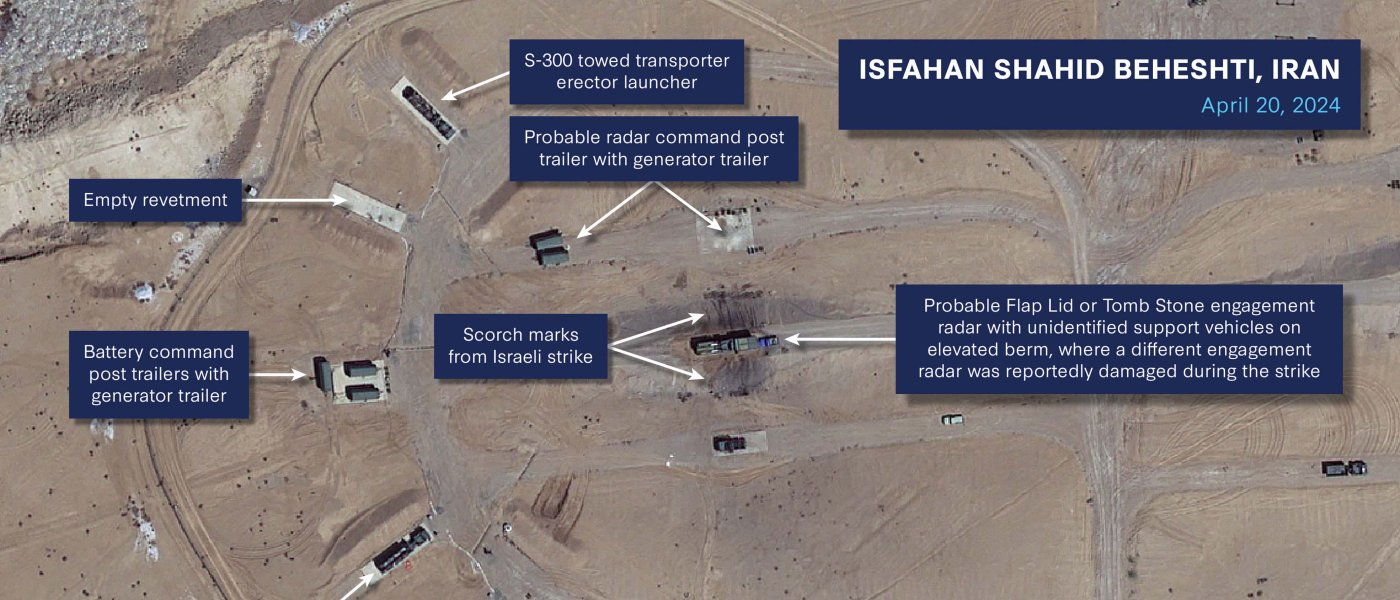
4 月 19 日,以色列在伊朗伊斯法罕摧毁了 S-300 远程防空系统的一部分,以色列和伊朗之间危险的反反复复似乎就此结束--至少目前是这样。根据对这次袭击的分析,以色列在冲突进一步升级和无所作为之间走了一条钢丝,同时也向德黑兰发出信号,它可以对战略要地--如伊朗的纳坦兹核浓缩设施及其更广泛的防空系统--实施精确打击。
4 月 1 日,以色列袭击了大马士革的一处外交设施,造成七名伊斯兰革命卫队(IRGC)军官死亡,引发了这场危机。伊朗领导人可能认为有必要向其国内民众和精英表明,国家不能不受惩罚地受到攻击。4 月 13 日,伊朗发射了 300 多枚导弹和无人机进行反击,这是从伊朗领土上对以色列发动的首次直接攻击。
鉴于伊朗袭击的规模和前所未有的性质,以色列的回应似乎微不足道。但 4 月 19 日的袭击最好被理解为是一次在避免事态升级的同时威慑伊朗的精心策划的尝试。以色列的反应明确威胁到伊朗最敏感的政治和军事目标,特别是其核基础设施,同时避免触发进一步升级的关键因素。这次袭击的设计表明,以色列希望避免与伊朗开战,而伊朗也发出了不寻求与以色列开战的信号。

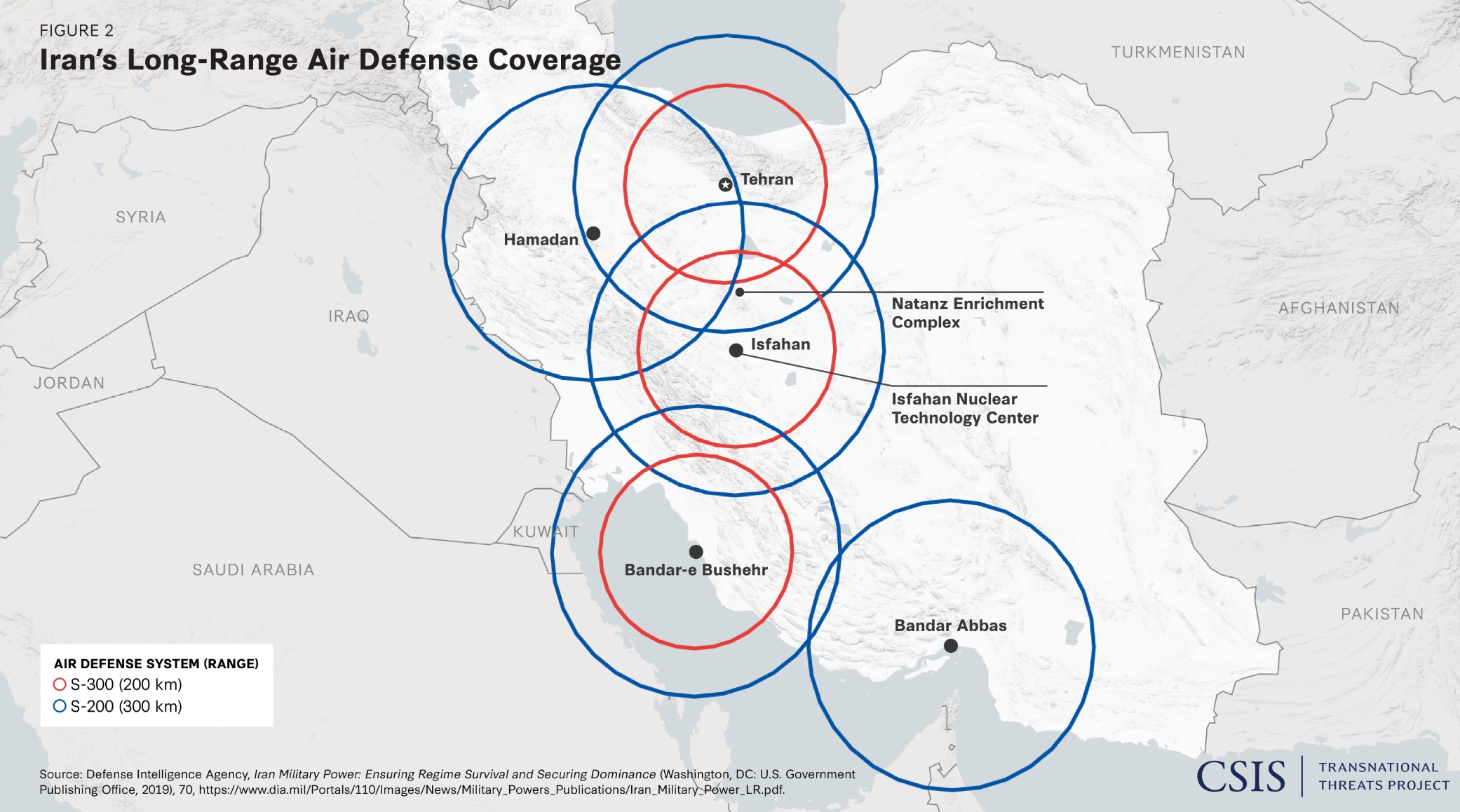
虽然没有伊朗轰炸的规模,但以色列的反应却以另一种方式威胁着伊朗最重要的军事能力,尤其是其核基础设施。S-300 是伊朗最先进的防空系统,长期部署在伊朗最重要的军事和政治场所。根据国防情报局的评估,S-300 炮台位于德黑兰、布什尔港和伊斯法罕。
德黑兰是伊朗的首都,而布什尔港则拥有重要的海军设施、空军基地和主要的能源基础设施。伊斯法罕也是空军基地所在地,但更重要的是,它位于纳坦兹铀浓缩基地以南约 100 公里和伊斯法罕核技术中心以北 20 公里处,这两个地方是伊朗核计划的核心。鉴于伊朗的核计划对德黑兰和特拉维夫都至关重要,这次袭击很可能传达了一种威胁。
与此同时,以色列似乎对更广泛的地区战争兴趣不大。造成重大损失或大量人员伤亡的更大规模打击可能会迫使伊朗领导人向自己的人民和政治领导层中的许多伊斯兰革命卫队老兵证明,伊朗会进行反击。
在伊斯法罕造成的破坏规模很小,足以避免这种政治愤怒。这次袭击可能只摧毁了一个 30N6 "襟翼盖 "或 30N6E "墓石 "交战雷达。虽然这比以色列在 4 月 13 日遭受的损失更大,但该系统是可以更换的。卫星图像显示,交战雷达通常所在的位置遭到了破坏。但伊朗似乎在袭击后一天内就更换了受损雷达,尽管商业卫星图像不足以确定该系统是否仍在运行,或者伊朗是否用 96L6E Cheese Board 早期预警和捕获雷达更换了交战雷达,这将使该地点无法运行,同时使德黑兰能够声称袭击没有造成任何损害。
如果伊朗担心这次袭击是更大规模行动的一部分,那么这次袭击也可能使冲突升级。尽管以色列的袭击规模不大,但伊朗可能担心对其防空基础设施的袭击可能是对其军事或政治基础设施进行更大规模袭击的前奏。如果德黑兰认为这种攻击正在进行,那么它将面临压力,在其导弹或飞机在地面被摧毁之前发动自己的攻击。
这次打击只针对伊朗防空综合体中射程最短的雷达,从而将这种担忧降到了最低,该雷达的设计目的不是定位威胁,而是引导拦截导弹飞向目标。虽然在安装新的交战雷达之前,该系统将无法发挥作用,但伊朗也会保持相对较高的信心,相信纳坦兹上空不会布满以色列的喷气式飞机。
最后,如果伊朗认为这次袭击越过了一个新的象征性门槛,迫使德黑兰升级反击,那么这次袭击可能会导致战争进一步升级。但这次袭击复制了以往袭击伊朗军事设施的明显特征,很可能是用四旋翼无人机进行的,而且袭击的是军事目标而非民用目标,从而避免了战争升级。一些证据表明,这次以色列是用从叙利亚领空发射的导弹袭击伊朗的,但伊朗领导人似乎并不认为这次袭击有什么不同,因此不需要做出冒着公开战争风险的回应。伊朗媒体声称,防空系统在伊斯法罕上空摧毁了三架无人机,但并未提及导弹。
以色列打击行动中明显的校准程度表明,以色列仍希望避免与伊朗公开开战,这与伊朗不希望与以色列公开开战的信号相吻合。但这种新的现状很难保证能够维持下去。例如,国内政治的变化可能使两国更愿意冒战争的风险。以色列总理本雅明-内塔尼亚胡(Benjamin Netanyahu)的谨慎回应似乎赢得了大量支持,但 4 月 13 日伊朗的无人机和导弹仍在以色列上空时,战时内阁成员本尼-甘茨(Benny Gantz)和加迪-艾森科特(Gadi Eisenkot)却主张进行反击。此外,极右翼国家安全部长伊塔马尔-本-格维尔(Itamar Ben-Gvir)呼吁以色列 "发飙",对伊朗的轰炸发动 "毁灭性攻击",然后又表示以色列的反应不够。虽然伊朗的政治立场更加不透明,但几乎可以肯定的是,伊朗的强硬派正在施压,要求对以色列采取更加公开的行动。
尽管双方都从边缘退了回来,但由于四月的危机,中东变得更加危险。以色列和伊朗都跨过了重要的象征性门槛,双方今后可能更愿意升级到类似的攻击。他们有很多机会这样做。以色列似乎正准备入侵拉法,它与黎巴嫩真主党的冲突仍在继续,伊朗支持的组织仍在整个地区发动袭击。然而,以色列的空袭似乎成功地在升级和不作为之间走了一次“钢丝”。
参考来源:CSIS
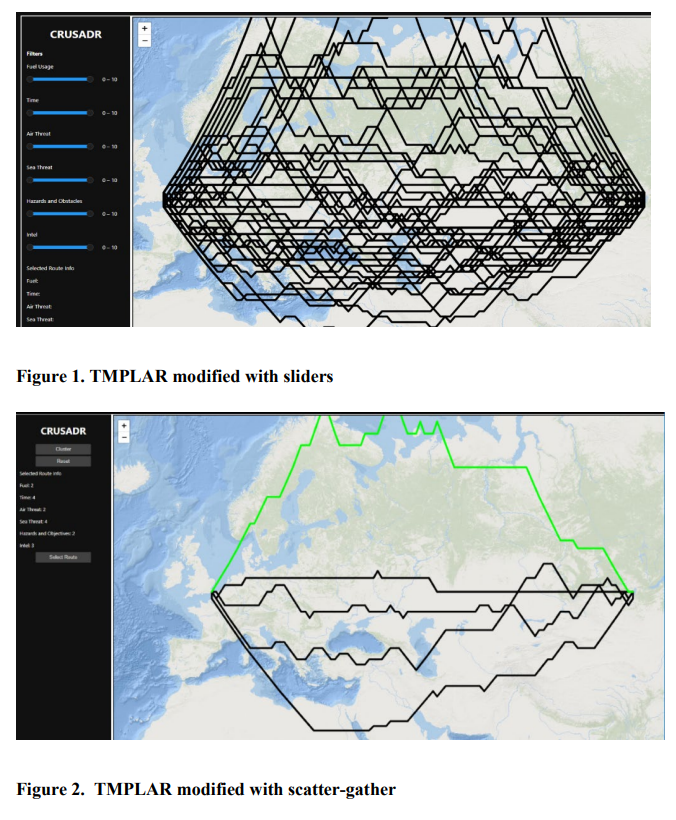
在行动方案(COA)制定过程中,军事规划人员面临着越来越多的限制、障碍和优先级调整。这种上升趋势给决策者带来了更大的认知工作量,使他们的工作变得更加复杂。目前,武装部队正在努力通过开发协助计划人员进行 COA 决策的系统来减轻工作量。我进行了一项实验,在多目标规划和资产路由工具(TMPLAR)框架内评估了三种不同的路线选择策略,通过使用路线过滤(通过滑块)和聚类(通过散点收集)来帮助决策者选择高效用路线,同时减少路线选择延迟和相关工作量。研究参与者在一个类似游戏的场景驱动型计算机应用中进行了多层次的 COA 规划。研究结果表明,与其他两种策略相比,通过滑块配置工具进行筛选将有助于用户选择更能反映指挥官意图的路线。此外,这项研究还提供了使用 TMPLAR 的可用性和感知工作量方面的反馈。这项研究旨在提高我们对军事决策的理解,以帮助军事领导人使用优化器的监督控制来实现准确、高效的路线规划。

本论文深入探讨了军用卫星通信系统为抵御敌方干扰威胁而可采用的各种现行和新型措施。特别是,本论文试图通过重点改进受保护战术波形标准的各种规格,探索提高受保护战术卫星通信性能的技术。由于 "受保护战术波形 "与 DVB-S2 相似,这些抗干扰技术首先在现有的 DVB-S2 平台上进行测试,然后再移植到以 "受保护战术波形 "为模型的平台上。
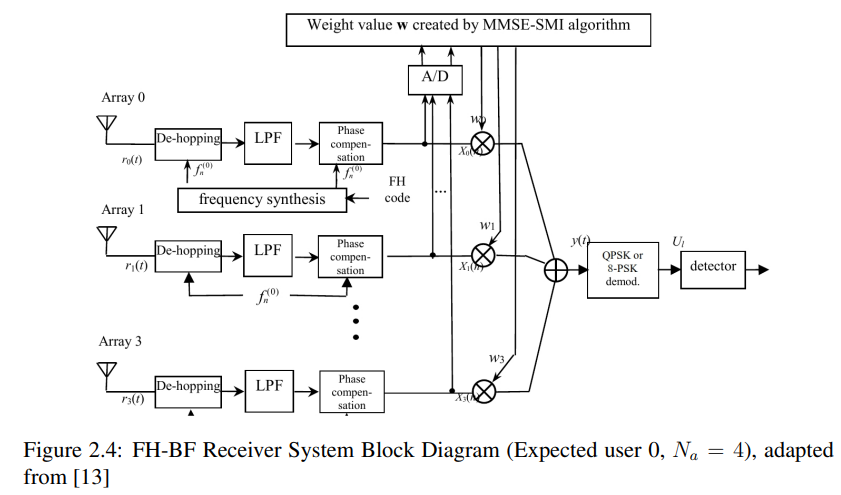
具体来说,用户首次尝试访问受保护战术卫星通信系统的初始登录过程是改进的重点。论文分析了登录过程的各个方面,包括系统采用的同步序列、到达方向估计方案、波束成形方案以及跳频背景下的自适应天线阵列。
本论文表明,在与使用跳频模式和波束成形算法的自适应天线阵列搭配时,可以采用更好的优化同步序列和方案来提高接收性能。本论文对提出的各种解决方案进行了比较和对比,以便为受保护战术波形标准提出一整套改进建议。

几十年来,由于需求的不断增长和行业间的竞争,飞机技术经历了巨大的改进。由于飞行包线不断扩大,战斗机的性能要求和稳定性是一个重要因素。先进的战斗机应具有高机动性。为了实现极高的机动性,需要非常好的飞机设计,包括在某些模式下具有静态不稳定性的多个冗余控制执行器、近乎精确的非线性飞机数学模型以及合适的非线性控制设计技术。通常,塞斯纳和派珀等训练飞机都具有静态和动态稳定性,易于修整和放手飞行。然而,这妨碍了极端机动能力。现代战斗机(如 F/A-18 战斗机)的结构不稳定,飞行时需要使用电传操纵系统,因此机动性高,易于主动俯仰、滚转和偏航。
通过引导发动机排气流的推力矢量法与先进的飞行控制系统相结合,可提供非常高的攻角,从而在空战中提供卓越的近距离空中狗斗能力。战斗机机动性能的增强使其比传统战斗机更胜一筹。罗克韦尔-MBB X-31 试验机就是一个很好的例子。美国国家航空航天局(NASA)为测试战斗机三维推力矢量技术而设计的两架 X-31 喷气式战斗机成功地展示了这一设想概念。洛克希德-马丁公司的 F-22 猛禽战斗机利用推力矢量控制实现了极限机动。考虑到飞机设计技术和生存能力要求的巨大变化,控制方案的设计对飞行控制设计师提出了巨大挑战。
传统上,飞机飞行控制器是通过在大量工作点上对非线性飞机模型进行线性化设计,然后使用增益调度来覆盖整个飞行包络线。但在大飞行包络中实现增益调度是一项相对困难的任务。过去,线性飞机模型的飞行控制曾采用过多种设计方法,如极点放置、H-无限鲁棒控制、最优控制等。但飞机的运动方程包括非线性气动力和力矩。此外,在高攻角情况下,气动力和力矩取决于气流的历史。当飞机进行高滚转率机动时,主要会遇到两种不稳定的情况,第一种是短周期纵向和方向振荡的不稳定性,第二种是自动旋转滚转,在这种情况下,战斗机会突然跳到更高的滚转率,此外,控制也会变得效率低下。所有这些现象都可能导致高攻角或侧滑,对结构造成异常负荷,从而导致事故。
线性控制器的缺点可以通过输入输出线性化(也称为非线性动态反演 (NDI))来克服。这种方法通过抵消模型的已知非线性函数来解耦选定受控输出变量的动态,然后通过额外信号的反馈来获得线性稳定的跟踪误差动态。显然,要实现精确抵消,必须精确知道飞机的动态。这就将非线性系统转化为恒定线性系统,但前提是所有非线性因素都必须精确已知。然而,考虑到现代飞机复杂的非线性气动特性,要实现这一点极其困难。风洞试验和飞行测试与计算流体动力学结果一起用于获得经验数据,但这些数据并不完全准确。通过使用稳健的线性控制器进行反馈控制,可以减小这些缺陷。尽管如此,由于结构损坏、控制效应器故障或不利的环境条件导致空气动力学发生突然变化,因此无法保证理想的性能。
可变结构控制器(VSC)是针对存在不确定性的非线性飞机模型而设计的。然而,可变结构控制器是状态变量的不连续函数。即使可以在边界层对控制法则进行一些平滑处理,也可能会导致终端跟踪误差。
针对模型中的大参数不确定性和未知函数,设计了基于后步法控制的非线性自适应飞行控制器。后步法设计方法分几步完成,因为这种方法具有迭代性质。所需的步骤数取决于受控输出变量的相对程度。此外,还设计了基于神经网络(NN)的飞行控制系统。最近,人们开始尝试设计具有状态和控制约束的自适应飞行控制器。这些自适应飞行控制器属于确定性等价自适应控制系统。在这些控制器中,直接使用积分更新法获得的参数估计。基于浸入和不变性(I&I)方法的非确定性等效自适应控制系统用于飞机控制。从实施的角度来看,自适应控制法则并不简单,因为参数估算器需要估算大量的空气动力参数。此外,过去曾对战斗机的稳定性进行过大量分析。分析表明,飞机在旋转耦合机动中存在丰富的动力学行为,包括线性和气动非线性。基于分岔方法和伪稳态分析,作者观察到滚转耦合在某些控制面偏转组合的瞬态阶段会导致不良的跳跃现象和侧倾角的快速发散。分岔理论由 Poincare 发明,用于分析非线性系统,首先应用于交叉耦合问题,然后扩展到高攻角飞行的全非线性问题。
本节引用的自适应飞行控制器只能实现渐近稳定性。研究人员还为一类非线性系统开发了有限时间稳定控制器。与渐近稳定控制系统相比,这类控制器具有更强的鲁棒性。一些与有限时间飞行控制系统相关的研究也已出现。当务之急是探索有限时间控制方法在同时进行纵向和横向机动以及在存在不确定性的情况下避免战斗机滚转耦合不稳定性方面的适用性。
本论文的主要目标是研究鲁棒有限时间控制技术与滑模控制和超扭曲飞行控制相结合在现代战斗机上的应用潜力。论文的贡献如下:
-
根据几何均匀性概念,为具有假定参数的标称飞机模型设计了有限时间稳定(FTS)非线性飞行控制法。
-
开发了一种非连续滑动模式(DSM)飞行控制器,以消除模型中不确定性的影响。在闭环系统中,包括标称有限时间稳定(FTS)控制法则和非连续滑动模式(DSM)控制信号,可实现滚转角、俯仰角和侧倾角的有限时间控制。DSM 控制法可能会导致控制颤振现象。
-
为了实现稳健控制,设计了一种超扭曲(STW)滑模控制法则。STW 控制法则是状态变量的连续函数。在闭环系统中,利用 FTS 和 STW 控制法则,可以实现飞机的有限时间控制。此外,这种复合控制系统还能减弱不理想的控制颤振。研究表明,在包括复合控制法则((i) 带有 DSM 的 FTS 或 (ii) 带有 STW 控制信号的 FTS)的闭环系统中,轨迹跟踪误差及其一阶导数在有限时间内收敛为零。
-
通过类似的步骤,设计出了对滚转角、攻角和侧滑角进行有限时间控制的复合控制系统(带 DSM 法则的 FTS 和带 STW 法则的 FTS)。
-
仿真结果表明,尽管存在参数不确定性,所设计的复合控制器仍能实现令人满意的(滚转、俯仰、侧滑)或(滚转、攻角、侧滑)同时纵向和横向机动。研究指出,与必须估计大量空气动力参数的自适应控制法则相比,衍生飞行控制器结构简单。
有限时间稳定(FTS)这一概念最早出现于 20 世纪 50 年代,适用于在固定的有限时间间隔内运行受限的系统。它要求对系统变量进行规定的约束,而定义经典稳定性则不需要。战斗机等动力系统的非线性微分方程需要快速、精确和连续的有限时间控制器。这些控制方案优于经典控制设计。首先,确定标量二阶有限时间系统的相位肖像结构。然后,利用这一特征来开发一类可用作控制器的二阶有限时间系统。滑模控制(SMC)是一种非线性控制方法,通过应用不连续的控制信号来改变非线性系统的动态,迫使系统沿着系统正常行为的横截面 "滑动"。状态反馈控制法不是时间的连续函数。相反,它可以根据当前在状态空间中的位置,从一种连续结构切换到另一种连续结构。
超扭曲控制(STW)是一种稳健的连续飞行控制方案,就符号(x)项而言,它完全是一个 PI 控制器(具有 P 部分调制)。超级扭曲控制(STW)方案适用于动态系统控制,以减弱由于不连续滑模控制而在控制输入中产生的颤振。
连续有限固定时间控制(FFTC)是传统超扭曲控制的直接扩展。它估算了固定时间上限和收敛时间。设计一个固定时间连续控制法则,使系统状态在预定义或固定时间内收敛到原点,是一个具有挑战性的问题。
编队控制概念基于对鸟类自然飞行行为的观察,鸟类会保持一个确定的几何形状。候鸟利用领航员提供的上冲力和旋转领航位置,以最小的个体努力扩大飞行范围。这种模式可用于大航程通信飞行或无人侦察机,或在最佳燃料消耗情况下使用。许多研究人员都在研究两架或多架飞机的编队飞行控制。

图 1.1: 四种具有推力矢量控制功能的超机动战斗机(时钟方向)。(a) F-22 由美国空军提供,摄影师:TSgt Ben Bloker;(b) 苏霍伊 SU 35 由 Dmitry Terekhov 拍摄;(c) 苏霍伊 Su-57 由 Dmitry Zherdin 拍摄;(d) 洛克威尔-MBB X-31 由美国海军陆战队 Cody Allee 少校拍摄。

指挥与控制系统与仿真系统互操作(C2SIM)是仿真互操作性标准组织(SISO)于 2020 年发布的一项标准。该标准的目的是在 C2 系统和仿真系统之间表达和交换指挥与控制 (C2) 信息。C2SIM 标准的部分内容包括使用 C2SIM 初始化信息初始化仿真系统的功能。虽然这些信息的目的是将以后由 C2 系统控制的实体实例化,但并不严格要求 C2 系统必须出现在演习中。这就为出于各种其他原因使用 C2Sim 初始化报文提供了可能性。
这些信息的一个可能用途是任务规划工具的通信机制。这些工具有助于缩小军事角色扮演者的作战知识与模拟系统主题专家的技术知识之间的差距。任务规划工具允许用户使用类似于 C2 系统的用户界面,在计算机生成的部队系统中轻松生成场景。这些系统大多依靠导出军事场景定义语言(MSDL)格式的文件,然后将其导入模拟系统。MSDL 标准已被 C2SIM 标准取代,系统可过渡到更新的标准。通过使用 C2SIM,规划工具还可以利用计算机生成部队系统的模拟能力来帮助用户规划方案。本文介绍了使用 C2SIM 信息与仿真系统通信的规划工具的开发过程,以及该标准带来的各种优势。
由仿真互操作性标准组织(SISO)于 2020 年发布的指挥与控制系统与仿真系统互操作(C2SIM)标准实现了 C2 系统与仿真系统之间的指挥与控制(C2)信息交换[3]。该标准允许使用 C2SIM 初始化消息对仿真系统进行初始化,除了对 C2 系统控制的实体进行实例化外,还可用于多种目的。其中一个用例是作为任务规划工具的通信机制,在军事角色扮演者的作战知识与仿真系统主题专家的技术知识之间架起一座桥梁。
通常情况下,真人虚拟建构(LVC)演习任务是利用各种互不关联、版本控制能力有限的工具进行规划的。这通常需要一名经验丰富、具备作战知识的主题专家(SME)构建多个保真度不断提高的预定场景图形,同时模拟系统操作员在模拟系统中构建相同场景,以确定其可行性。由于需要多名操作员,而且这些系统不具备互操作性,因此需要花费更多的时间来制定低地轨道演习的作战任务。任务规划工具可以通过与模拟系统集成的单一工具来制定整个任务,从而帮助解决这些问题。
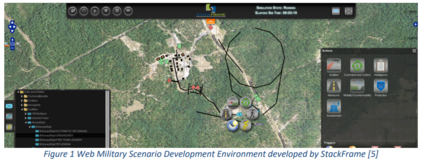
任务规划工具是一种专门用于生成作战方案的应用程序。这些工具可能类似于计算机生成的部队应用程序或 C2 系统(或两者的某种组合),但不具备执行模拟的能力。相反,它们为模拟系统输出必要的信息,以初始化其实体。直到最近,这都是通过军事场景定义语言(MSDL)完成的,但 C2SIM 最近取代了这一标准。Forcebuilder 和 StackFrame 的 Web 军事场景开发环境 (WebMSDE) 是任务规划工具的两个实例。Forcebuilder 是一个可生成 MSDL 文件的增强型 Microsoft Access 数据库,在战斗实验室协同仿真环境(BLCSE)上执行的 "统一挑战 LVC "演习(2017-2019 年)期间被广泛使用。WebMSDE(如图 1 所示)是一款功能强大的场景生成工具,作为 "一支半自动化部队"(OneSAF)[5]的一部分而开发。
C2SIM 标准
指挥与控制(C2)系统的发展在现代军事行动中起着举足轻重的作用,它将复杂的功能集成在一起,提高了作战效率。这些系统主要以计算机为基础,具有几个关键功能:生成或接受军事行动计划,以命令的形式传达给单元,并通过情报报告显示这些行动的当前状态。这就为用户提供了态势感知,使他们能够根据情景的变化发布新的命令。在一个分布式、网络化的 "系统之系统 "中,各级指挥官和参谋人员之间的相互联系凸显了当今 C2 系统的复杂性。
C2(指挥与控制)系统经常被整合到军事模拟演习中,以复制真实的作战场景,让受训人员在模拟作战条件下发展关键的决策技能。将计算机模拟与 C2 系统结合起来有三个主要目的:
- 通过行动方案(COA)分析协助规划过程,模拟预测行动方案的潜在结果。
- 通过提供一个合成作战环境,让参与者输入活动信息并查看针对模拟对手的可能结果,从而加强军事训练。
- 在反映对手和环境因素最佳情报的环境中协助任务演练。
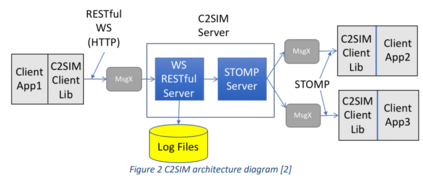
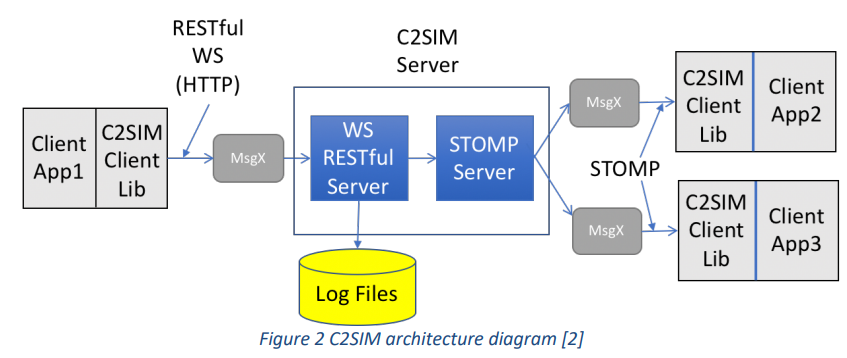
一直以来,模拟需要在 C2 和模拟系统之间设置人工中介。然而,人们一直希望将模拟与 C2 系统直接连接起来,以减少所需的时间和人力。此外,有必要为这种耦合提供一个标准化接口,即 C2SIM,以实现各种模拟和 C2 系统的互换使用。C2SIM 结构如图 2 所示。
如第 1 节所述,C2SIM 取代了 MSDL 和联军作战管理语言(Coalition-Battle Management Language,C-BML)标准,将其整合为单一标准。MSDL 标准侧重于为联军中的 C2 和仿真系统提供一致的启动条件数据,而 C-BML 则用于提供命令和任务信息。通过为数据交换提供统一的语言和结构,C2SIM 简化了 C2 系统和仿真系统之间的通信和协调。
北约建模与仿真小组(NMSG)测试的联军使用的 C2SIM 版本是这一概念的最佳范例。它允许多个联盟伙伴通过共享网络运行 C2SIM。每个国家都使用自己的 C2 系统和模拟,准确反映其部队、装备和理论。尽管每个国家的部队都有其独特的属性,但这种互操作性使其能够快速做好执行任务的准备,促进有效协作。[4]
C2SIM 的发展经历了各种合作努力,包括建立 SISO 研究小组和北约 MSG 参与联盟战士互操作性演习 (CWIX) 等活动,所有这些都极大地促进了其进步和作战相关性。C2SIM 标准的演变是技术进步和作战需要之间动态相互作用的结果,SISO、NATO MSG 和其他利益相关方的共同努力在制定标准方面发挥了关键作用,这些标准不仅要解决复杂的技术问题,还要解决实际环境中的实用性问题。随着 C2SIM 的不断进步,它在加强联军环境中军事行动的互操作性和有效性方面发挥着至关重要的作用。
开发支持 C2SIM 的任务规划工具原型
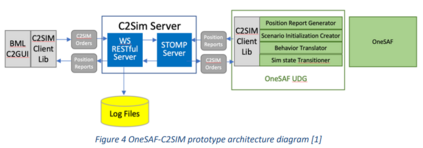
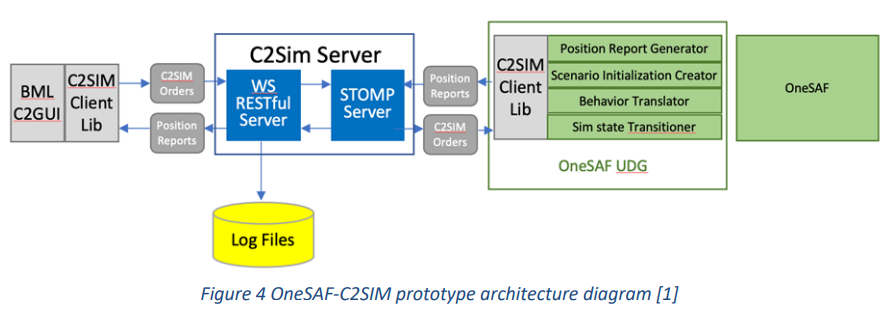
为支持 2019 年 CWIX 演习,雷斯顿测试中心(RTC)开发了 OneSAF 的原型扩展,以便与实施 C2SIM 标准草案的系统对接。该原型设计有三个主要目标:(1) 通过 C2Sim 服务器集中控制模拟;(2) 向 C2Sim 客户端提供实体位置报告;(3) 根据 C2Sim 命令启动模拟行为。开发过程包括用一个新组件增强现有的 OneSAF 用户数据网关(UDG),以便与 C2Sim 服务器进行有效通信。该接口采用了简单文本定向消息协议(STOMP)用户,并将 C2Sim 订单翻译成 JavaScript Object Notation (JSON),以便与 UDG 进行无缝交互。该原型扩展的架构如图 4 所示。尽管 C2Sim 标准的草案性质和有限的开发资源带来了挑战,导致 OneSAF 中的保真度有限且需要硬编码行为输入,但原型成功地展示了基础级别的互操作性[1]。
为了利用 C2SIM 标准快速开发任务规划工具,重新使用了为 CWIX 演习开发的 OneSAF 扩展程序。对 2019 年使用的原型进行了更新,以便与最新版本的 C2SIM(ClientLib v4.8.3.1)和 OneSAF 软件(12.0 版)协同工作。此外,最初的 OneSAF-C2SIM 原型并不完全支持通过 C2SIM 初始化消息初始化实体。在 CWIX 演习期间,演习前创建了一个 OneSAF 场景文件,其中包含 OneSAF 系统模拟的所有实体。这大大简化了原型,因为实体无需通过 C2SIM 信息进行实例化。OneSAF-C2SIIM 原型能够生成 C2SIM 初始化报文,以填充其他连接系统上的必要数据结构。
原型的初始化能力已得到增强,可通过 C2SIM 初始化信息将 OneSAF 实体实例化。作为标准的一部分,初始化报文包含实体名称及其相关单元的组织结构、实体位置、实体的 DIS 枚举以及实体的运行状态。实体实例化的一个难点是将所需的 DIS 枚举映射到特定的 OneSAF 实体,但这并不是一对一的映射。在这个早期原型中,选择了数量有限的 OneSAF 实体,并建立了一个映射表来转换 C2SIM 初始化信息中包含的每个实体。一旦解析了这些信息,就可以在 OneSAF 中直接创建实体。
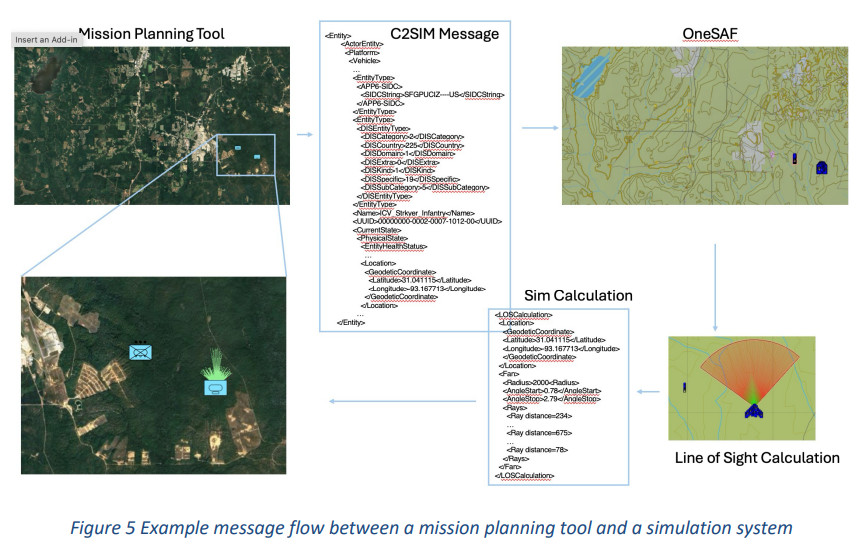
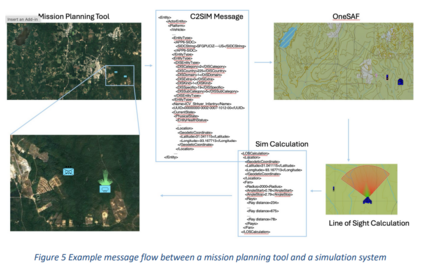
除了从任务规划工具中生成模拟实体外,还研究了从模拟系统中查询信息的能力。为了证明这种功能的实用性,我们利用 OneSAF 中的视距计算(视线计算的一种)功能来填充任务规划工具中的图形。为此,在 UDG 中创建了一个额外的应用编程接口(API)端点,并使用 "呈现状态传输"(REST)查询与任务规划工具进行通信。图 5 显示了任务规划工具与 OneSAF 之间的完整信息流。