成为VIP会员查看完整内容
VIP会员码认证
首页
主题
发现
会员
服务
注册
·
登录
计算机视觉
关注
32492
计算机视觉是一门研究如何使机器“看”的科学,更进一步的说,就是是指用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步做图形处理,使电脑处理成为更适合人眼观察或传送给仪器检测的图像。作为一个科学学科,计算机视觉研究相关的理论和技术,试图建立能够从图像或者多维数据中获取‘信息’的人工智能系统。
综合
百科
荟萃
VIP
热门
动态
论文
精华
医学图像分割研究生,想放弃了怎么办?
PaperWeekly
2+阅读 · 2023年4月12日
【2023新书】深度学习与计算机视觉在遥感中的应用,572页pdf
专知
27+阅读 · 2023年4月6日
香港大学刘希慧组计算机视觉方向博后、博士生和研究助理招生和招聘
机器之心
2+阅读 · 2023年4月5日
中文文本生成发展到哪一步了?写方案、写广告的AI全能工具已上线
机器之心
8+阅读 · 2022年11月29日
北京/杭州内推 | 阿里巴巴AAIG团队招聘计算机视觉算法实习生
PaperWeekly
2+阅读 · 2022年11月25日
香港大学韩锴课题组招募计算机视觉、深度学习方向博士及博士后
机器之心
2+阅读 · 2022年11月24日
一文了解prompt learning在计算机视觉领域进展
极市平台
7+阅读 · 2022年11月11日
【经典书】计算机视觉中的结构化学习与预测,178页pdf
专知
3+阅读 · 2022年11月7日
普通段位玩家的CV算法岗上岸之路(2023届秋招)
极市平台
1+阅读 · 2022年11月1日
回顾60多种transformer研究,一文总结遥感领域最新进展
极市平台
2+阅读 · 2022年11月1日
回顾60多种transformer研究,一文总结遥感领域最新进展
机器之心
3+阅读 · 2022年11月1日
北京内推 | 联想研究院招聘计算机视觉算法实习生
PaperWeekly
0+阅读 · 2022年10月28日
ECCV 2022开奖!清华、浙大校友斩获最佳论文奖
新智元
0+阅读 · 2022年10月26日
ECCV2022开会了!阿姆斯特丹大学122页《双曲表示学习计算机视觉》教程
专知
2+阅读 · 2022年10月25日
GNN与Transformer在CV中怎么用? 香港大学最新《图神经网络和图Transformers在计算机视觉应用》综述
专知
6+阅读 · 2022年9月29日
参考链接
父主题
人工智能
计算机科学
子主题
视觉问答
目标跟踪
光学字符识别
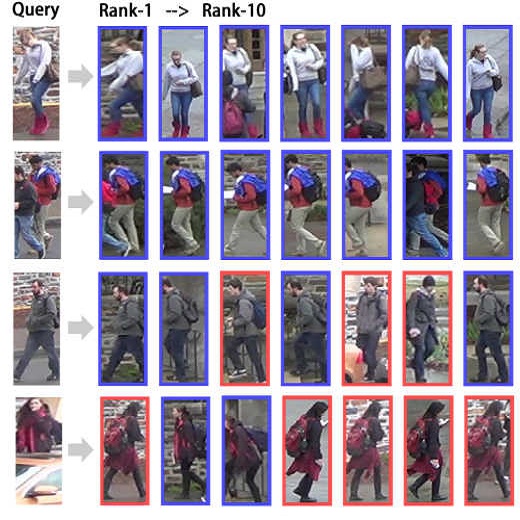
行人重识别
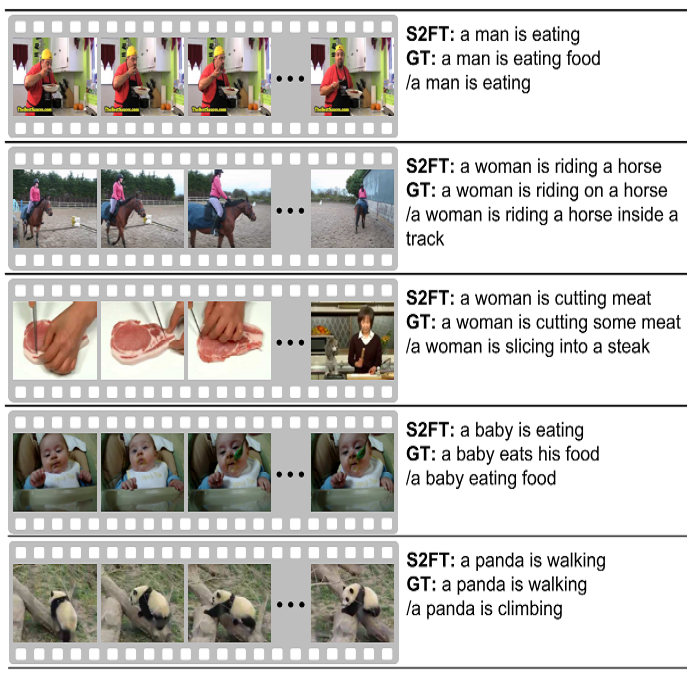
视频描述生成(Video Caption)
图像检索
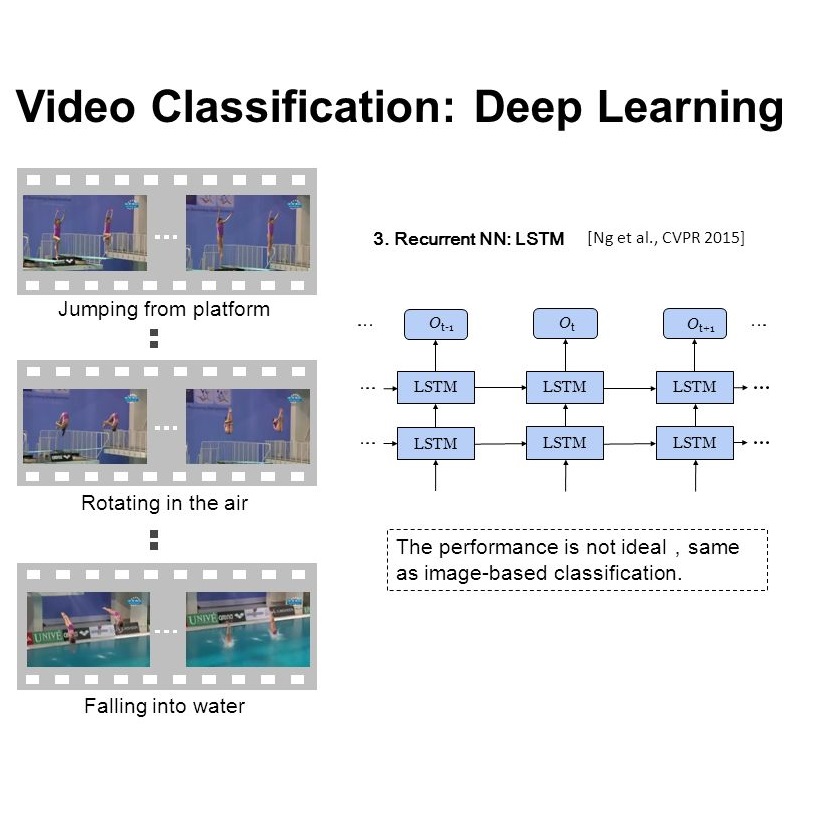
视频分类
增强现实(AR)
图像超分辨率重建
图像分割
图像处理
图像修复
图像缩放
朱俊彦
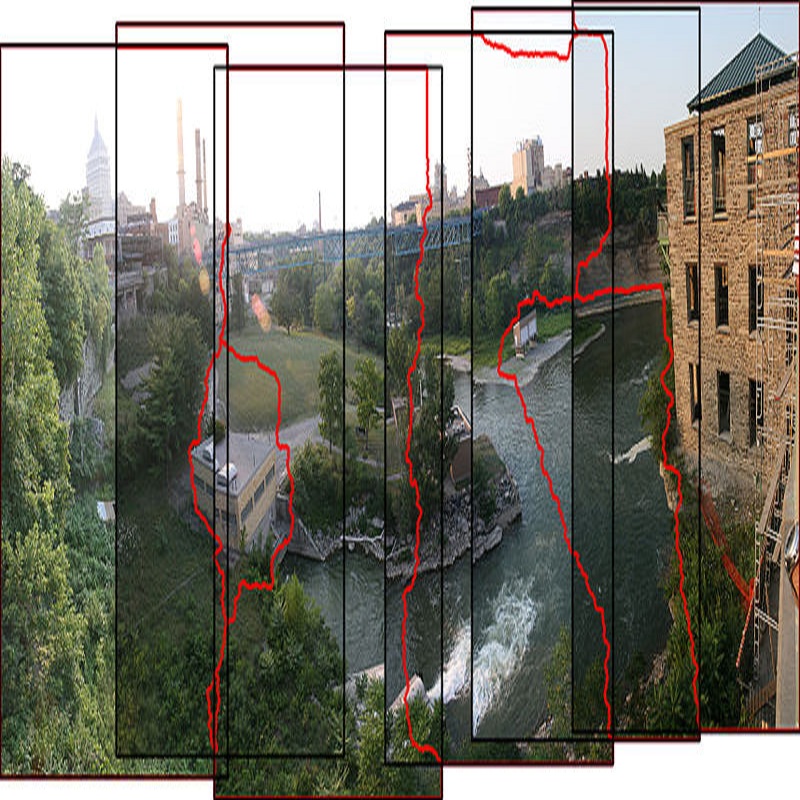
图像拼接
虚拟现实(VR)
三维重建
运动行为分析
图像配准
目标检测
图像识别
图片分类
特征提取
图像描述生成(Image Caption)
提示
微信扫码
咨询专知VIP会员与技术项目合作
(加微信请备注: "专知")
微信扫码咨询专知VIP会员
Top