基于雷达探测与图像识别的飞机跑道异物智能检测
2000年7月25日法航协和飞机被跑道上的异物扎破轮胎,轮胎爆炸击中油箱导致飞机起火失事,最终造成机上109人,地面4人,共113人死亡的惨剧。从此FOD被引起广泛的重视。

美国联邦航空局(FAA)关于雷达(毫米波雷达)检测的要求如下:
要求雷达能够检测高度3cm、直径3.8cm的异物;
探测距离大于1km;
雷达放置距跑道中心线50m以上。
基于雷达探测与图像识别的飞机跑道异物智能检测机场跑道异物FOD(Foreign Object Debris),是泛指可能损伤航空器或系统某种外来的物质、碎屑或物。现有的FOD探测系统主要采用雷达探测技术与视频图像识别技术。目前世界上较为典型的有英国开发的Tarsier 系统、以色列开发的FODetect系统、新加坡开发的iFerret系统和美国开发的FOD Finder系统。
FOD的种类许多,典型的有:金属器件(螺帽、螺钉、垫圈、钉子、保险丝等)、机械工具、飞行物品(私人物品、钢笔、铅笔、纽扣等)、橡胶碎片、塑料制品、混凝土沥青碎块(石头、沙子、冰渣等)、纸制品、动植物等。带来的危害非常严重,许多案例都证明,机场道面上的外来物可以很容易被吸入到发动机,导致发动机失效,碎片也会堆积在机械装置中,影响起落架、机翼等设备的正常运行,不仅会损坏飞机和夺去宝贵的生命,而且还伴随着巨大的经济损失。目前,国内大多数机场跑道监察工作主要靠道面巡查人员进行人工完成,在道面巡查时将关闭跑道,这使得航班通行能力不仅效率低、可靠性差,而且占用了宝贵的跑道使用时间。
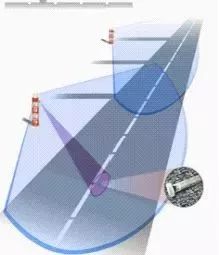
机场跑道异物检测系统是根据机场跑道长度与宽度,选择具体受检道面关键位置,在跑道一侧分区域安装前端探测系统设备,在所需高度的塔架上,将雷达与多传感器一体化监控前端及相应伺服装置共同安装于跑道侧面固定架(或跑道灯)上,前端多传感器探测系统将异物位置信息传送给监控系统显示端,监控系统根据位置调整云台和角度、焦距和光圈等,对异物进行跟踪监测拍照,并进行智能分析处理后,将相关信息发送给主控系统供主控系统分析处理,并将检测到的异物信息上传到指挥中心,同时发出报警提示。

FAA发布的“机场FOD探测设备”咨询通告(AC No: 150/5220-24)中,提供了FOD探测设备的相关信息。该通告包含了机场异物探测系统和设备的最低性能规范。通告明确指出FOD探测系统必须具备如下功能:监控AOA区域;探测和定位AOA区域中单个或多个FOD;探测出FOD后能为用户提供警报;与机场和飞机通信、空管和监控系统协同工作并不会产生干扰;不干扰正常的机场和飞机运行;记录探测到的FOD数据,方便系统的校准和维护,以及FOD事件的分析。同时FAA还详细规范了FOD探测系统的各项指标,包括系统至少能探测到的FOD尺寸、探测频率、FOD出现后系统响应时间、探测区域、气候影响、报警、探测数据输出和记录、寿命、环境条件、供电、土建要求、安装和验收、质保、检查和测试、用户手册、设备培训和维护等方面的情况。
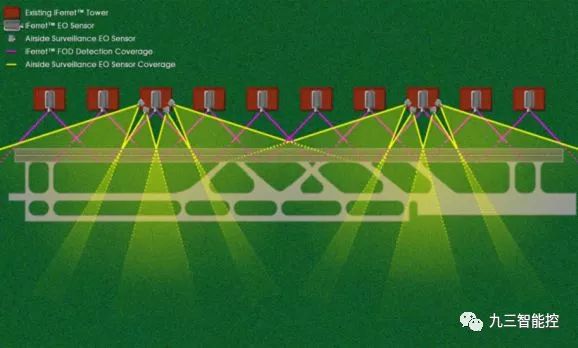
现有的FOD探测系统主要采用雷达探测技术与视频图像识别技术。目前世界上较为典型的有英国开发的Tarsier 系统、以色列开发的FODetect系统、新加坡开发的iFerret系统和美国开发的FOD Finder系统。Tarsier 系统、FODetect系统、FOD Finder 系统采用毫米波雷达探测为主、视频图像识别技术为辅的手段来探测FOD;iFerret系统只采用视频图像识别技术进行FOD的探测。基于雷达技术的系统对颜色没有反应,而基于视频图像识别技术的系统能对颜色和光照对比度产生反应。
2008年,FAA的研究人员对以上4个系统分别在4个机场进行了性能测试,对每种技术的探测能力进行评估。这4种探测系统为机场提供了一个很宽的性能和价格选择范围,不限制机场应用何种FOD探测技术,机场可以根据飞机的数量及种类、监控区域的数量种类及位置、探测的精度、机场的气候条件等因素来综合确定探测系统的具体性能指标。
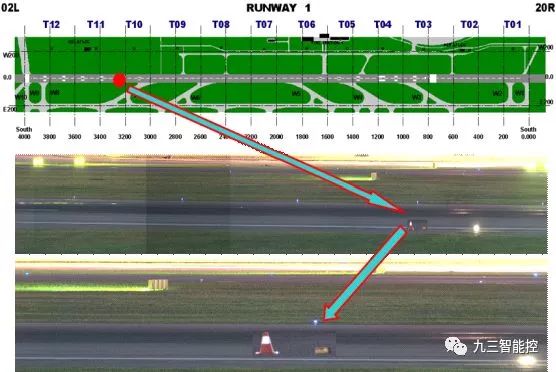
以雷达探测为主、云台摄像机视频监控为辅
在跑道两端以及中部安装毫米波雷达,每部雷达的探测距离约为1000m,实现对整条跑道实时连续扫描的任务(特别是对金属FOD的探测效果很好),对整条跑道的探测响应时间依据雷达对道面的扫描时间而定。在发现有FOD异物后,在跑道一侧安装的云台监控摄像机转动到该异物区域,并拉近异物图像(光学放大),从而方便管理员进行确认。在雷达未发现FOD的时期,云台监控摄像机可按照预设的扫描计划调整云台的位置以及光学焦段,连续摄取跑道的各个角度的视频画面,作为异物监测和跑道入侵监控的手段。

在跑道两端以及中部安装毫米波雷达,每部雷达的探测距离约为1000m,实现对整条跑道实时连续扫描的任务(特别是对金属FOD的探测效果很好),对整条跑道的探测响应时间依据雷达对道面的扫描时间而定。在发现有FOD异物后,在跑道一侧安装的云台监控摄像机转动到该异物区域,并拉近异物图像(光学放大),从而方便管理员进行确认。在雷达未发现FOD的时期,云台监控摄像机可按照预设的扫描计划调整云台的位置以及光学焦段,连续摄取跑道的各个角度的视频画面,作为异物监测和跑道入侵监控的手段。
检测系统的工作流程:
• 雷达不间断对跑道扫描,发现FOD时触发报警;
• 监控室对发现目标的的位置显示高亮;
• 监控室操作光学设备云台使其对准目标,使用目视确认FOD现场画面;
• 借助全球定位系统获得FOD目标的精确定位;
• 判断FOD目标的危害性,告知清除车辆,迅速清除FOD。
• 监控室的“工具箱”自动记录时间、气候、FOD特性、FOD位置等信息。
工作流程示意图:

参考资料
http://www.cevlink.com/solutions/aqsc/aqsc.htm
法国戴高乐机场空难

事件回顾
说到由于机场跑道异物,引发的机毁人亡的事故,最让人们刻骨铭心的,恐怕就要算是2000年7月25日,从巴黎戴高乐机场起飞的一架,法国航空公司的协和超音速客机的遭遇了。据说这架法航的协和飞机在起飞56秒钟之后,机场控制塔的工作人员,突然发现它的尾部起火,飞行员发现情况在紧急迫降的过程中,不幸坠毁。这不仅造成机上109人全部遇难,同时地面的4位无辜百姓,也因此丧生。

事故原因
经过一个多月的调查,专家们出乎意料地发现,这一次事故的原因,是飞机在起飞滑跑的过程中,轧到了跑道上的一块43厘米长的金属薄片,导致轮胎爆裂,爆裂的轮胎碎片飞起,正好击中了飞机的油箱,引发燃油泄漏并燃起大火,最终导致飞机坠毁。而那导致整个惨案的罪魁祸首——金属薄片,正是从上一班飞机上遗漏的异物。由于航班的频次多,飞机跑道不可能被随时巡查,所以那块夺命的金属薄片,才没有被及时发现,酿成了惨剧。
跑道异物
现在所有的各大国际机场当中,甚至普通的机场当中,已经把跑道异物列为仅次于鸟类对飞机损伤的第二大危害了。原来看似空荡荡的跑道,虽然少有人迹到达,但是也会有遗留杂物的可能。

这些异物也是千奇百怪,比如什么螺母,纽扣,瓶盖儿,金属碎片等物品,有些是飞机上掉下来的小零件(边起飞降落边掉零件可还行),会直接扎破飞机轮胎酿成事故;有些可能是大风天刮来的碎纸片、树枝树叶、小金属物、塑料袋、小动物尸体(这几天在北京被刮成狗的科教授深有感受),由于它们较轻,很容易被飞机起降时,产生的强大气流吸入发动机,带来潜在的安全隐患。

小花同学

呃!既然飞机这么危险,我们还是坐高铁好了…
哈哈哈,别怕别怕,接着听科教授讲。异物既然很危险,我们及时清理不就好了嘛。


科教授
不过要想清除这些异物,可是不简单,一方面是凭借人力排查,这样虽然精细度高,却耗时耗力,另一方面是驾车巡查,但是精准度下降,需要巡检的次数增加。

人工巡查
这些
方法虽然有效,但是都与机场快速增长的起降频率形成了矛盾。于是民航局第二研究所和中国电子科技集团公司开始探究自动检测的方式。

自动检测
自动检测也有很多种,塔架式、边灯式、车载式、光学探测、电学探测等等方式不仅各有优劣,而且只有少数几个国家才能掌握技术。我国的科学家们总结经验,经过多年的探究,在多个单位,多个科研部门的共同努力下,终于研制出了一个雷达与光学混合探测的精巧系统。在不远的将来,我国第一条无需人力巡查的飞机跑道,将有望投入实际运营。

转自丨mems
往期热文(点击文章标题即可直接阅读):






