密集的 S 形弯道、高起伏的上下坡道、异形/复杂的交叉路口……8 月 26 日下午,i-VISTA「中国电信 5G 杯」自动驾驶汽车挑战赛的第三项赛事——创新应用挑战赛,在重庆礼嘉白云湖公园的公共道路举行。发车仪式由市委常委、两江新区党工委书记、管委会主任段成刚,中国人工智能学会理事长,中国工程院院士,欧亚科学院院士李德毅,中国通用技术集团总经理陆益民,中国科学院自动化研究所复杂系统管理与控制国家重点实验室主任、赛事总裁判长王飞跃,市经信委党组成员、总工程师赵刚,两江新区党工委副书记、管委会副主任李顺,渝北区副区长张问伦,江淮汽车董事长安进,中国汽车工程研究院股份有限公司董事长李开国等共同启动。
本届挑战赛进入第三天赛程,来自国内外高校/研究机构、车企、科创公司的 26 支队伍参赛车辆终于开始在真实的山城道路上进行角逐。对于自动驾驶系统来说,这是难得的测试路况。重庆电信的 5G 基站在赛前已完全覆盖白云湖公园,满足比赛的高带宽网络需求。
![]()
![]()
![]()
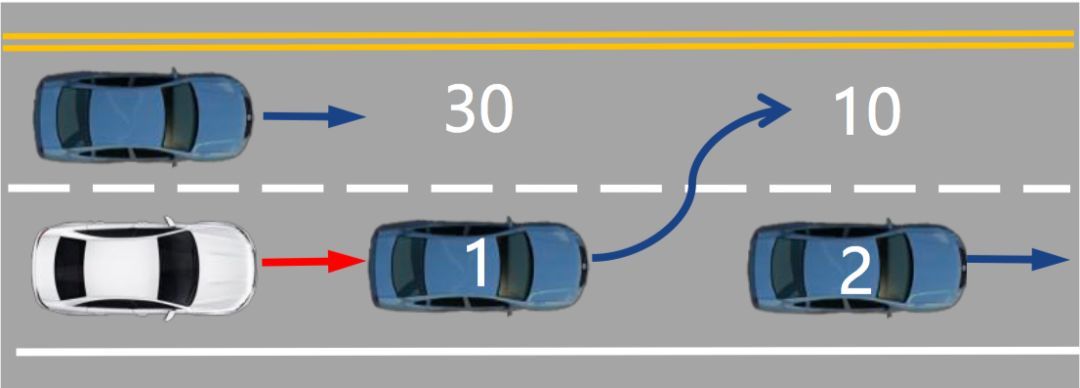
1.起点-2.匀速跟车走停-3.前车切出-4.路口右转-5.途中接人-6.行人窜出-7.U形弯道掉头-8.施工区绕行-9.让行救护车-10.急弯下坡-11.十字路口左转-12.障碍物绕行-13.主动超车-14.路边停车
这些场景除了一些应对静态复杂路况的场景,还包括多交通参与者之间交互的动态驾驶场景,比如行人窜出、让行救护车、途中接人、前车切出,非常接近城市交通的实际,也充分体现了创新应用挑战赛的「应用」特点。
途中接人、让行救护车两个场景还分别运用了 V2I 和 V2V 网联通讯技术
,在比赛中具体的运用方法是:途中接人,参赛车辆行驶途中接到车站随机发出的乘客搭车信息后,自指定入站口驶入车站接乘客。让行救护车,在参赛车辆同一车道后方行驶的救护车,当与参赛车辆相距 100 米时,通过 V2V 和声光发出应急警报,参赛车辆迅速向相邻车道变道让行救护车。
创新应用挑战赛考核的是 L3-L4 自动驾驶技术在真实城市道路和复杂交通场景中的性能。今年组委会为参赛车队统一提供高精地图,并且在赛前 2 小时才完成比赛场景搭建,参赛车队没有机会进行场景练习。一系列复杂的静态交通路况和随机的动态驾驶场景对参赛车队自动驾驶技术考评的结果,具有实际的参考价值。
![]()
该场比赛设置了行人窜出(俗称鬼探头)场景,场景设计与 8 月 23 日 AEB 比赛的唯一区别是场景点处参赛车辆左侧未放置干扰背景车,右侧遮挡行人的大型巴士和行人窜出的时机和速度完全一致。大部分参赛车辆经过该场景的速度都在 20km/h 以下,甚至是 10km/h 以下,因此未出现 AEB 比赛中 30-50km/h 工况下发生大量碰撞的情况。
![]()
今年 i-VISTA 挑战赛的各场比赛中,组委会总是有意「为难」参赛车辆,比如各种随机场景,再比如 8 月 25 日进行的城市交通场景挑战赛中,右转弯礼让行人+右转弯礼让行人+闯红灯行人避让,短距离内连续设置 3 个随机场景,考验自动驾驶汽车的快速决策能力。
创新应用挑战赛中,这样的情况依然存在,如障碍物绕行+静止车绕行——障碍物绕行后,紧接着需要绕行障碍物前方的静止车,本来三组障碍物的摆放就很挑战车辆的行驶轨迹,再加上绕行静止车,有的参赛车就应接不暇了,导致在此行驶缓慢、短时停车。
但正是这些更接近于真实交通环境的场景,才能考验自动驾驶的技术水平,进而推动技术的优化升级。
i-VISTA「中国电信 5G 杯」自动驾驶汽车挑战赛创新应用挑战赛成绩公示
![]()
14个比赛场景及评分规则
![]()
创新应用挑战赛共设置 14 个场景(如上所列),总分为 3000 分
,每个场景不单独设置分数,根据比赛规则进行扣分。比赛限时 15 分钟,15 分钟内未完成则扣 100 分,且每多超时 30s 加扣 50 分。参赛车辆若为商用车,完成比赛后获得额外 5% 的奖励加成。
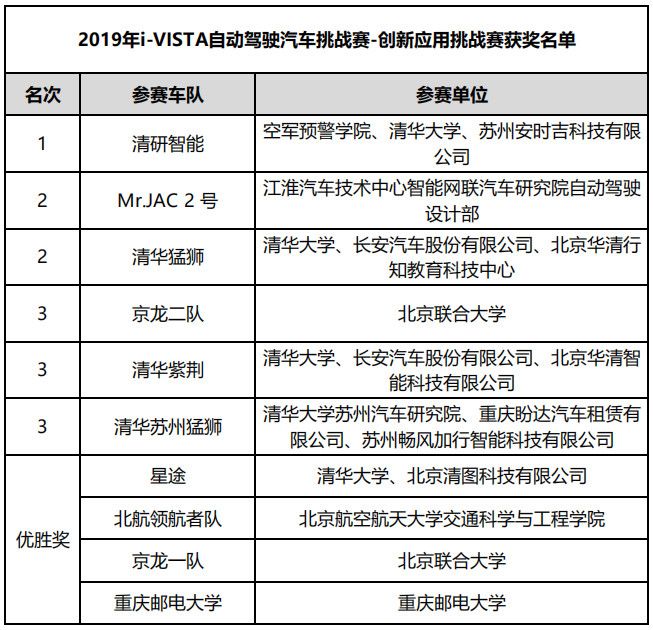
参赛车辆静止于起始线前方,设置好自动驾驶参数,待起点裁判员发出「开始」指令后,车辆开启自动驾驶模式,自动起步出发。
![]()
1)参赛车辆在裁判员发出开始指令后不能及时起步的,每 10s 扣 50 分。
2)参赛车辆提前起步的,不扣分,但比赛计时增加 1 分钟。
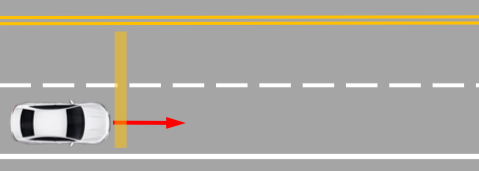
参赛车辆沿车道接近前方以 30km/h 匀速行驶的目标车辆,跟车行驶 15s 后,前方车辆缓慢减速刹停,并在刹停 3 秒后起步,当稳定加速至 30km/h 后再次缓慢刹停,10 秒后再起步加速至 30km/h 稳定行驶。为防止参赛车辆提前变道,另一背景车将在邻车道保持与参赛车辆并行。
![]()
参赛车辆与其他车辆发生碰撞的,一次扣 100 分。
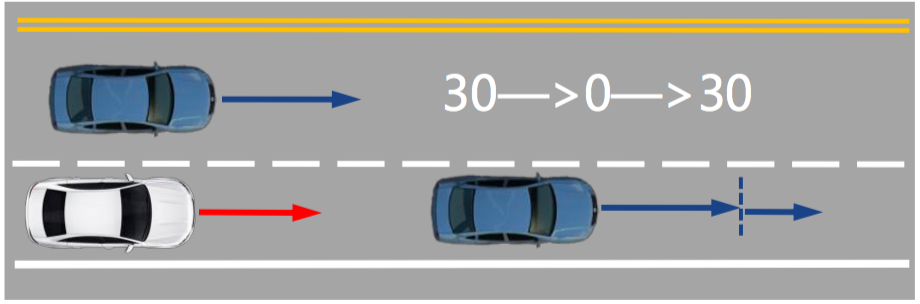
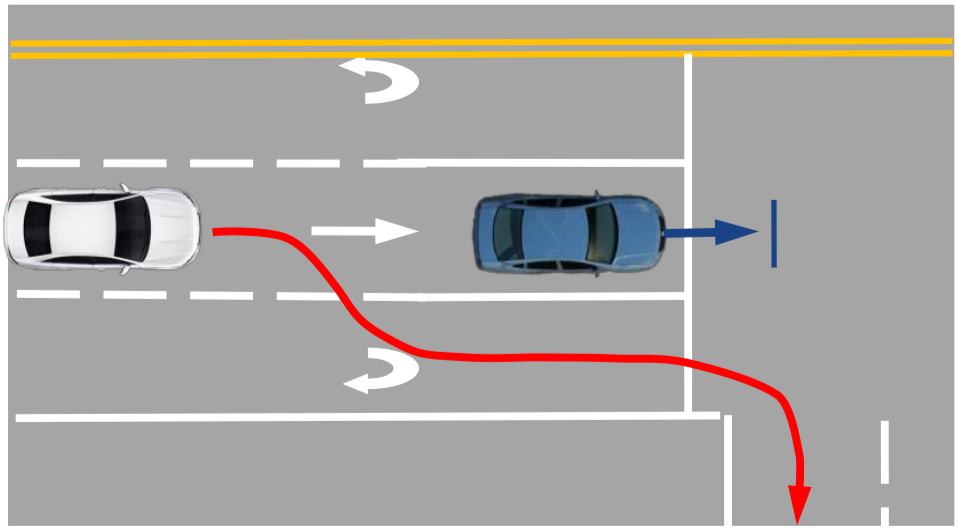
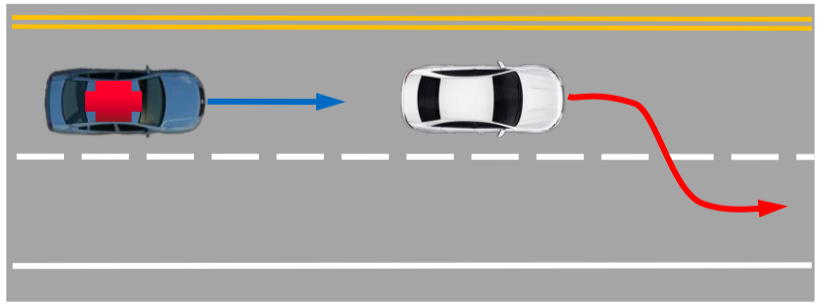
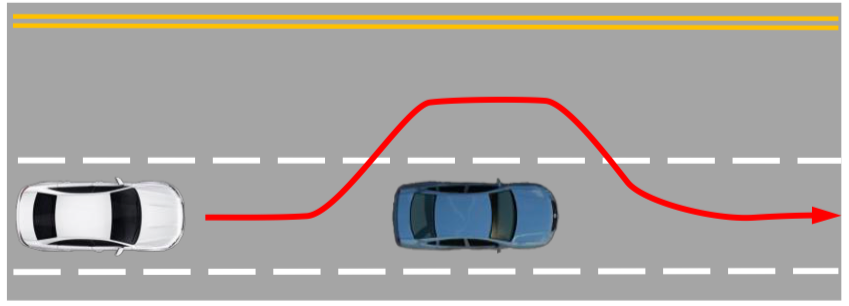
参赛车辆跟随目标车 1 沿车道以 30km/h 匀速接近前方以 10km/h 行驶的目标车 2。当目标车 1 与目标车 2 相距 10~20m 时,目标车 1 向左变道切出,参赛车辆应迅速减速并跟随目标车 2 稳定行驶。为防止参赛车辆提前变道,另一背景车将在邻车道保持与参赛车辆并行。
![]()
参赛车辆与其他车辆发生碰撞的,一次扣 100 分。
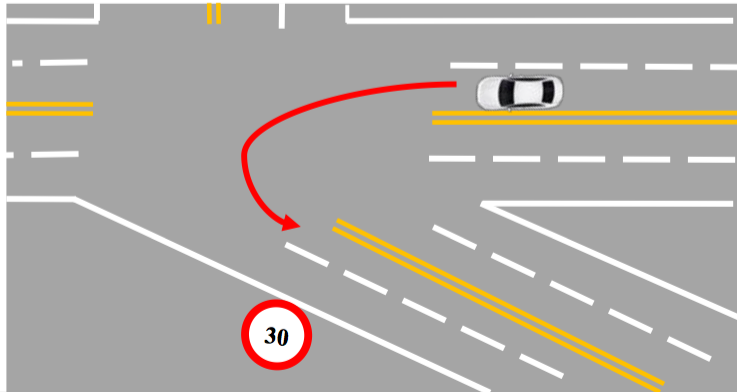
参赛车辆跟随前方车辆沿车道驶向前方十字路口,前方车辆沿直行车道驶入路口,参赛车辆沿右转车道向右转弯。
![]()
1)参赛车辆与其他车辆发生碰撞的,一次扣 100 分。
2)参赛车辆不按规定在右转车道右转的,扣 50 分。
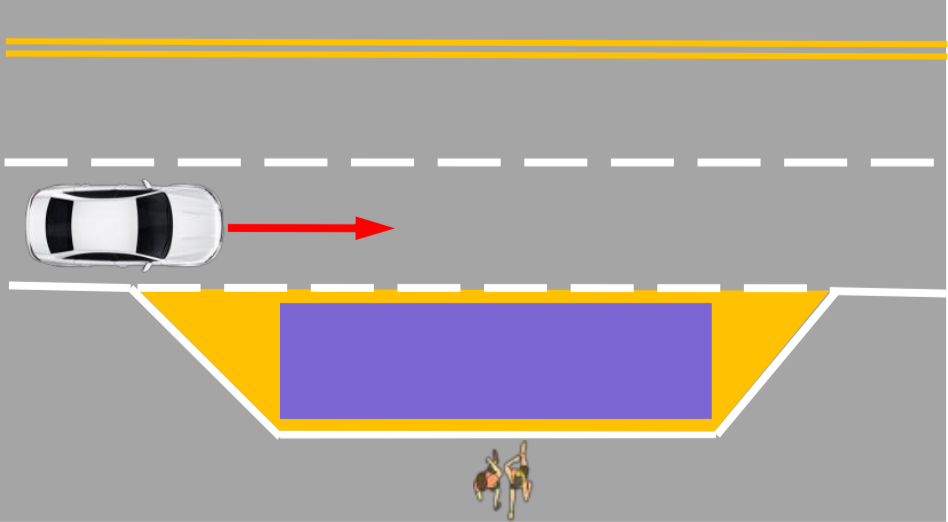
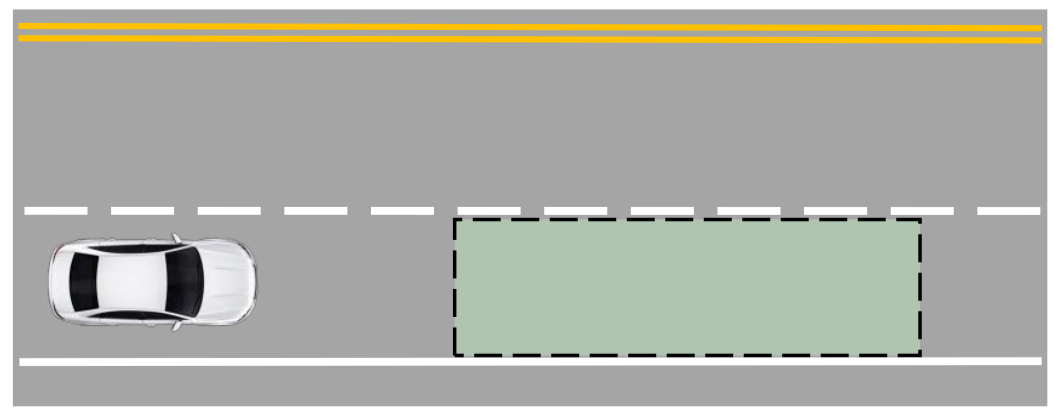
参赛车辆行驶途中将接到车站随机(有且仅有 1 处)发出的乘客搭车信息,接到该信息后,参赛车辆应自指定车站入站口驶入,并靠边停靠在蓝色区域内,停靠 10s 后,再沿车站出口驶离车站。该场景运用了 V2I 通讯技术。
![]()
1)无乘客搭车时,参赛车辆无故驶入车站区域的,扣 100 分。
2)有乘客搭车时,参赛车辆不驶入车站或驶入车站后停靠时间少于 10s 的,扣 100 分。
3)有乘客搭车时,参赛车辆不能完全停靠至蓝色区域内或停靠时右轮距离道路边线内沿超过 30cm 的,扣 50 分。
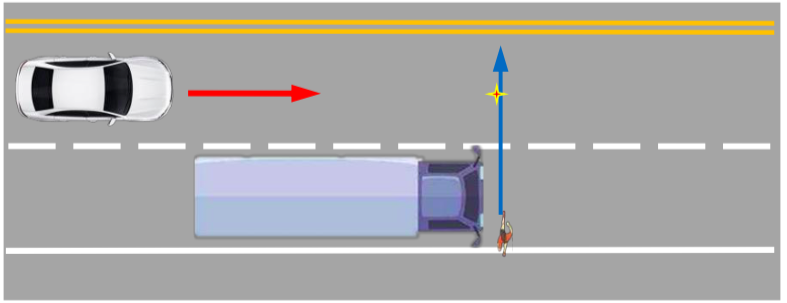
参赛车辆自相邻车道驶向前方静止的大型巴士(或大型箱式货车),当两车车头相距不超过 8 米时,模拟行人随机 (有且仅有 1 处)以 5km/h 自大车车头窜出横穿马路,参赛车辆应及时刹停避免与行人发生碰撞。
![]()
1)参赛车辆与其它车辆或模拟行人发生碰撞的,一次扣 100 分。
2)无行人窜出时,参赛车辆在大车附近(与大车有横向重叠)无故刹停的,扣 50 分。
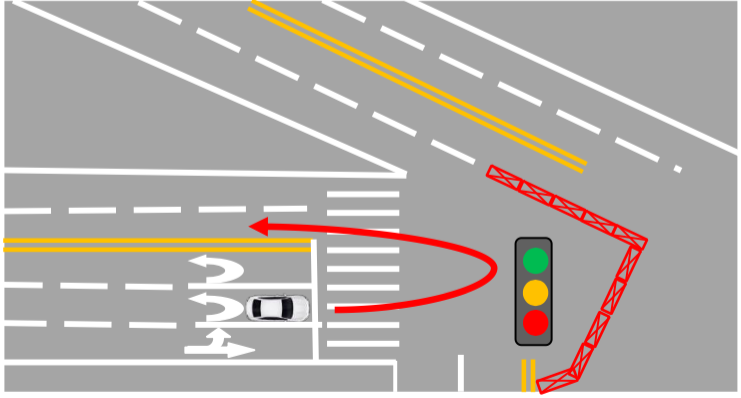
参赛车辆沿 U 型弯道掉头,行驶过程中应注意控制车速,按红绿灯指示在路口掉头。
![]()
1)参赛车辆不按规定在左转车道掉头或压人行横道掉头的,扣 50 分;
2)参赛车辆在红灯刹停时车轮超出停止线的,扣 50 分,闯红灯行驶通过路口的,扣 100 分;
3)参赛车辆在绿灯亮起后不能及时起步的,每 5s 扣 50 分;
4)路口左转信号灯为绿灯时,参赛车辆无故刹停的,扣 100 分。
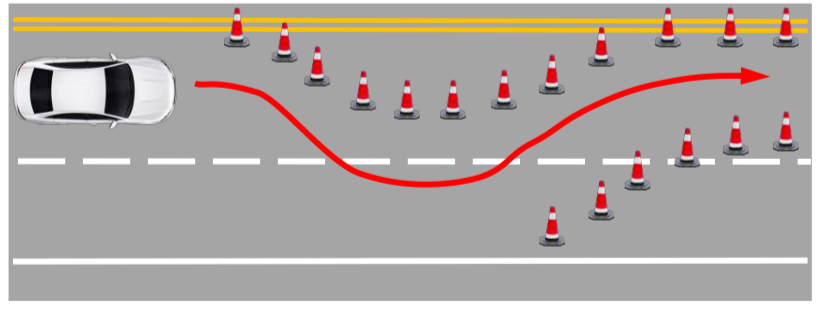
参赛车辆按照施工警告标志及锥形交通标(高 >60cm,间距 30~40cm)指引,安全通过施工区域。
![]()
1)参赛车辆与锥形交通标发生碰撞、碾压,导致锥形桶的轮廓圆完全暴露出来,一次(个)扣 20 分。
2)参赛车辆在施工区域内变道未开启转向灯的,不扣分。
参赛车辆沿车道向前行驶,救护车在相同车道自后方快速接近参赛车辆,并在两车相距 100m 时发出应急警报(V2X+声光),参赛车辆应迅速向相邻车道变道让救护车先行。
![]()
1)参赛车辆在救护车发出警报 20s 内不完成变道的,扣 50 分。
参赛车辆沿左转车道右转急弯下坡,行驶过程中应注意控制车速。
![]()
1)参赛车辆不按规定在规定车道转弯的,扣 50 分。
2)参赛车辆测速超过 33km/h 时,一次扣 50 分,且每持续 10s 加扣 50 分。
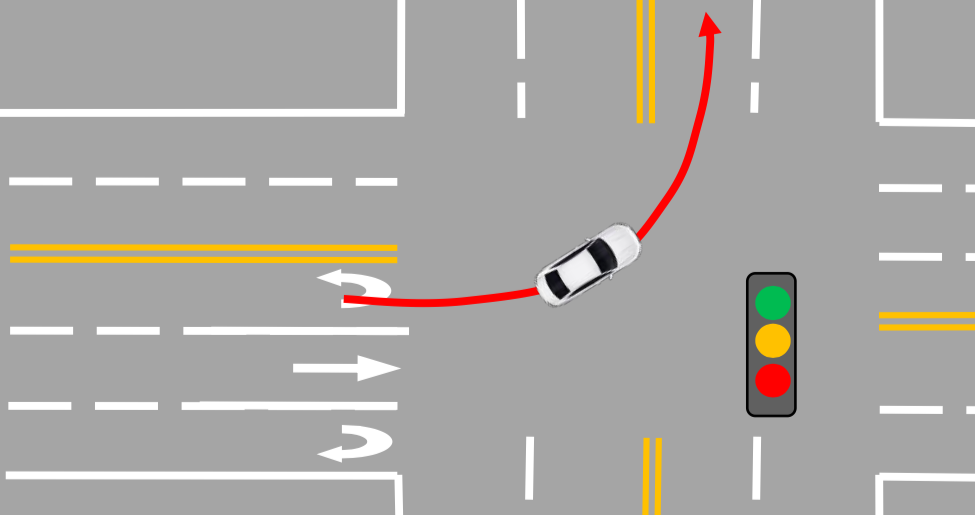
参赛车辆沿车道驶向前方十字路口,并按红绿灯指示左转通过路口。
![]()
1)参赛车辆不按规定在左转车道左转的,扣 50 分。
2)参赛车辆在红灯刹停时车轮超出停止线的,扣 50 分,闯红灯行驶通过路口的,扣 100 分。
3)参赛车辆在绿灯亮起后不能及时起步的,每 10s 扣 50 分。
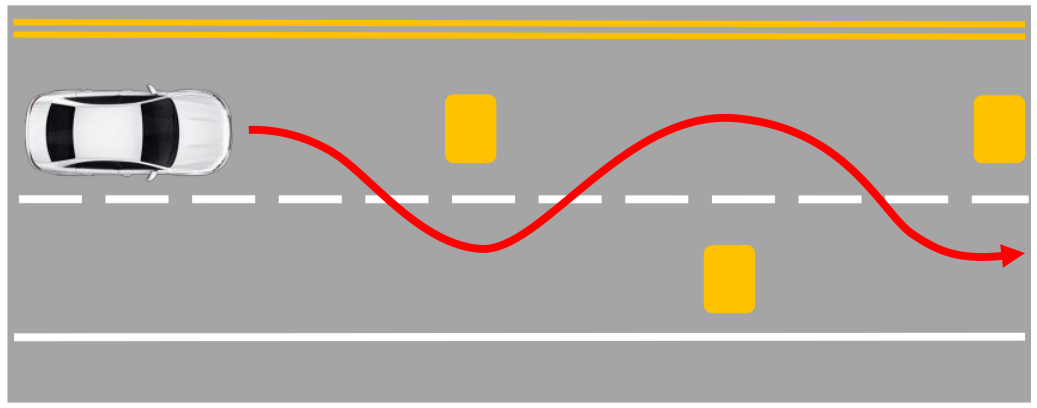
参赛车辆沿车道驶向前方车道中央随机放置的连续静止障碍物(水马隔离墩),连续两个障碍物之间纵向距离不低于 20m。参赛车辆应沿 S 线行驶,避免与障碍物发生碰撞。
![]()
参赛车辆与水马隔离墩发生碰撞的,每次(个)扣 50 分。
参赛车辆跟随前方 10km/h 车辆缓慢行驶,在合适变道位置主动变道超车。
![]()
2)参赛车辆与前方车辆发生碰撞的,扣 100 分。
![]()
1)参赛车辆停至终点指定区域时,车轮距离道路边线内沿超过 30cm 或车身超出可停区域边线的,扣 50 分;
2)车轮距离路边线内沿超过 50cm 或车身完全停至可停区域外的,扣 100 分。
除了上述 14 个场景各自对应的评分规则,以下是一些基本的计分规则,如有发生,也将从总分中扣除:
1、
比赛过程中,如发现远程操控车辆或更改系统参数的,取消比赛资格,总成绩计 0 分。
2、
参赛车辆出现人工干预的,一次扣 50 分,且每持续 10s 加扣 50 分。
3、
除超车及躲避障碍物外,压虚线(含路口导向线)行驶的,每 10s 扣 50 分(一次短暂压虚线不扣分)。
4、参赛车辆压实线(含导流线)或逆向行驶的,一次扣 50 分,且每持续 10 加 50 分;
5、参赛车辆碾压路沿石,与其他车辆或物体发生碰撞的,一次扣 50 分。
6、除红绿灯路口、行人避让、拥堵场景及事故原因外,参赛车辆发生停滞的,一次扣 50 分。
7、除碾压路沿石或与其他实体发生碰撞外,参赛车辆倒车行驶的,一次扣 50 分,且每持续 10s 加扣 50 分。
8、
参赛车辆变道、路口转向时不能按交通规则打开相应转向灯的,一次扣 50 分。
9、
参赛车辆驶离比赛路线的,一次扣 100 分,且必须自驶离处返回,期间所用时间计入比赛总时间。
10、
若参赛车队因故调试,应向随车裁判报备,调试视为一次人工干预,且调试时间计入比赛总时间。若在 5 分钟之内不能恢复比赛的,终止比赛。
总结
创新应用挑战赛考核的是 L3-L4 自动驾驶技术在真实城市道路和复杂交通场景中的性能。
连续性的复杂交通场景,配以重庆特有的弯道、坡道、异型路口等路况,该项比赛对参赛队伍来说具有极大的挑战性。
另外,今年组委会统一提供赛场的高精地图,无需车队自行采集赛场地图数据,而且开赛前 2 小时才完成比赛场景搭建,避免车队根据比赛场景信息在系统程序中「打点」和进行特定程序的修改,最大程度保证赛事的严谨性和公正性。
赛事的重要配套活动——5G 自动驾驶技术示范体验,将于 8 月 28-29 日在仙桃数据谷举行。
更多精彩,敬请持续关注。
2019 i-VISTA 自动驾驶汽车挑战赛共包括四大赛项:
8 月 24 日,于白云湖公园划定区域举行 ADAS 驾驶辅助系统挑战赛
8 月 25 日,于中国汽研礼嘉园区举行的自动驾驶城市交通场景挑战赛
8 月 26 日,于白云湖公园公共道路举行的自动驾驶创新应用挑战赛
8 月 27 日,于 G85 高速举行的自动驾驶商业化进程挑战赛
赛事全程将进行直播,无法到现场观赛的观众可通过官网 http://www.i-vista.org/ 观看线上直播。
对自动驾驶比赛感兴趣的朋友可扫码二维码入群交流,获取自动驾驶比赛最新信息,也可加微信:autoHS
![]()
i-VISTA 智能汽车集成试验区是经工信部和重庆市批准,中国汽研立足于人车路网云应用示范,联合众多行业资源共筹共建的国际领先、国内一流的智能汽车与智慧交通公共服务平台。i-VISTA 已建成 5G 可控全网联模拟城市乡村高速试验示范区,和覆盖全国 85% 以上道路环境的复杂开放测试道路,支撑前沿技术标准研究和测试验证、关键技术融合应用、多场景产业化示范探索,助力智能网联汽车和智慧交通产业健康发展。i-VISTA 通过中国智能汽车指数评价、自动驾驶汽车挑战赛、智能网联汽车国际研讨会等顶级行业活动,为公众提供中立、公正、专业、权威的智能汽车测评信息,服务消费者买车用车,引导企业优化开发设计。
自 2018 年开始,i-VISTA 每年在重庆举办大规模自动驾驶汽车挑战赛。2019 年自动驾驶汽车挑战赛 8 月 24 - 29 日举行,中国电信 5G 冠名赞助。