【泡泡一分钟】基于视点描述子字典在局部到全局点云配准中的应用(ICCV2017-82)
每天一分钟,带你读遍机器人顶级会议文章
标题:Local-to-Global Point Cloud Registration using a Dictionary of Viewpoint Descriptors
作者:David Avidar, David Malah, and Meir Barzohar
来源:International Conference on Computer Vision (ICCV 2017)
播音员:阿晨
编译:刘梦雅 周平(93)
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

由于局部点云与全局点云的数据之间存在实质性差异,且用于获取它们的技术不同,因此局部到全局的点云配准是一项具有挑战性的任务。全局点云覆盖大尺度环境并且通常需要从空中俯视获得,例如使用机载激光扫描(ALS)对城市进行3D建模。作为对比,局部点云则通常从地面获得,并且范围相对更小,例如使用地表激光扫描。他们之间的差异通常表现在点密度分布,遮挡和噪声测量中。由于存在这些差异,现有的点云配准方法如基于关键点的配准往往会失败。
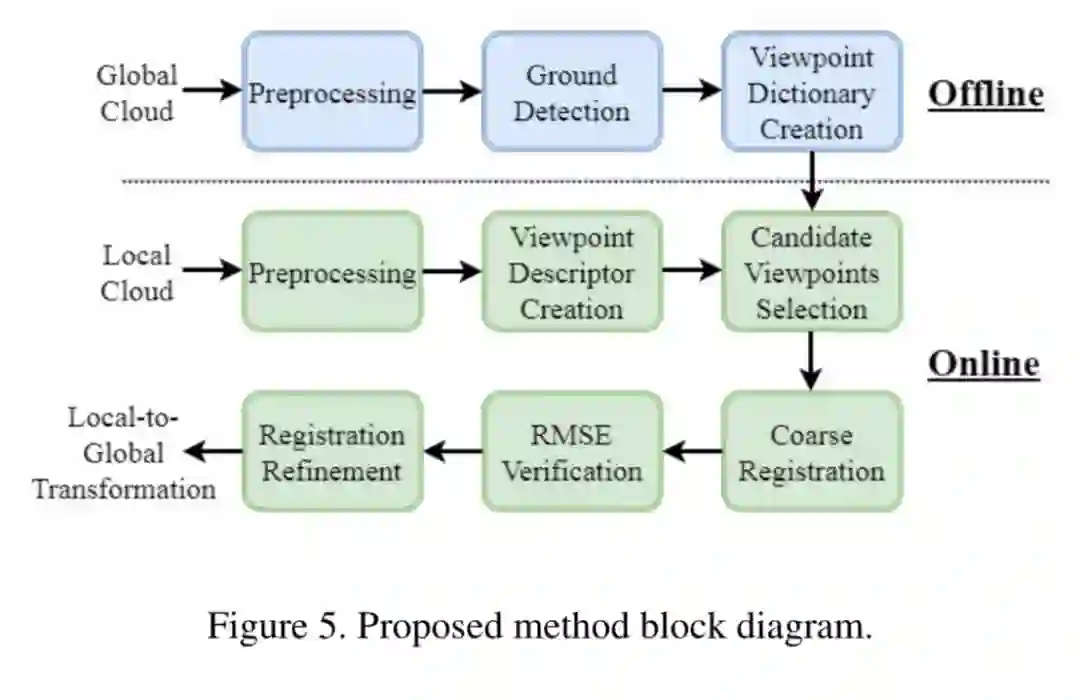
因此我们基于最近提出的将全局点云转换为基于视点的点云词典的方法进行了改进。我们提出了一种局部到全局的配准方法,用视点描述子替换点云字典,包括全景范围的图像。然后,我们利用相位相关在离散傅立叶变换(DFT)域中的作用进行有效的字典搜索,以快速找到从局部参考帧到全局参考帧的合理变换。本文的方法框架如下图。
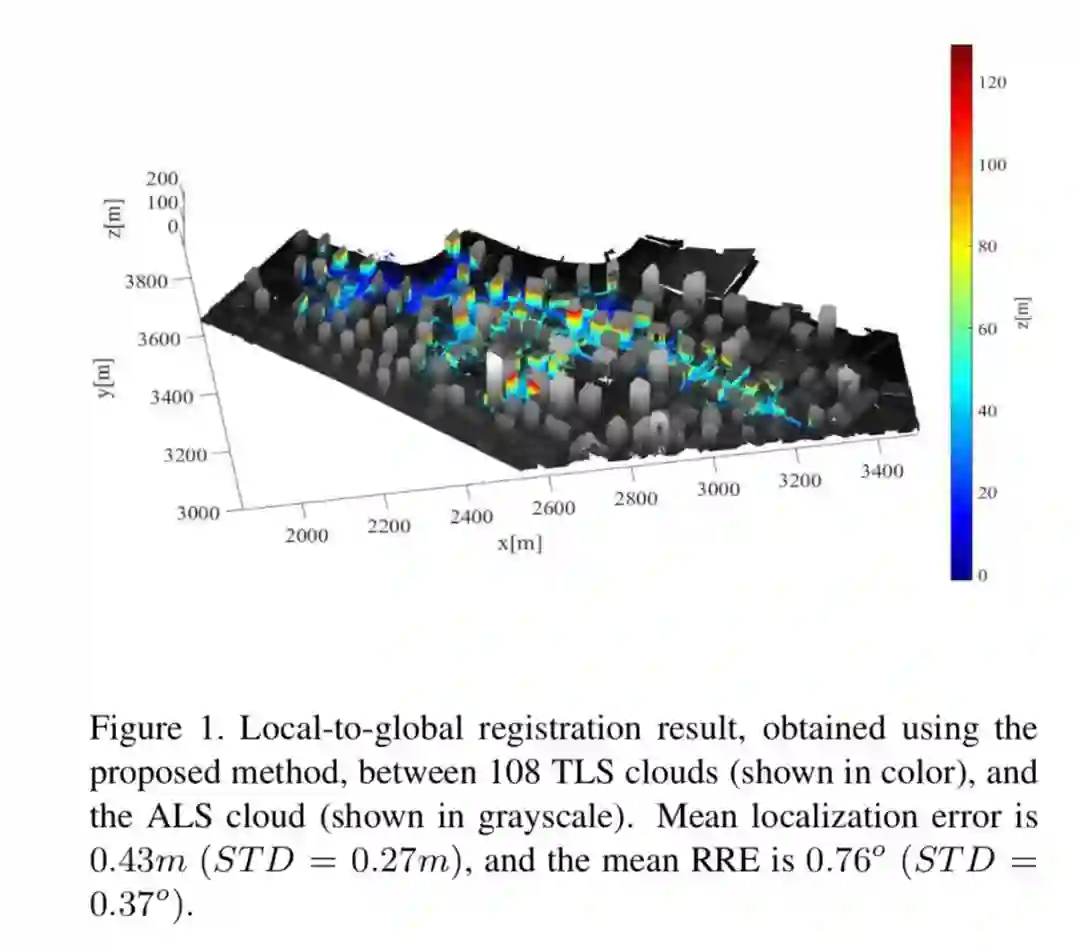
在计算效率和内存要求方面,我们的方法展现了相对于以前的点云字典方法的显著优势。此外,与目前先进的基于关键点的方法(FPFH)相比,我们展示了本方法的卓越的配准性能。我们使用具有挑战性的TLS局部云数据集和ALS大规模全局城市云数据集进行评估计算。实验结果可见下图。

Abstract
Local-to-global point cloud registration is a challenging task due to the substantial differences between these two types of data, and the different techniques used to acquire them. Global clouds cover large-scale environments and are usually acquired aerially, e.g., 3D modeling of a city using Airborne Laser Scanning (ALS). In contrast, local clouds are often acquired from ground level and at a much smaller range, for example, using Terrestrial Laser Scan- ning (TLS). The differences are often manifested in point density distribution, occlusions nature, and measurement noise. As a result of these differences, existing point cloud registration approaches, such as keypoint-based registra-tion, tend to fail. We improve upon a different approach, recently proposed, based on converting the global cloud into a viewpoint-based cloud dictionary. We propose a local-to-global registration method where we replace the dictionary clouds with viewpoint descriptors, consisting of panoramic range-images. We then use an efficient dictionary search in the Discrete Fourier Transform (DFT) domain, using phase correlation, to rapidly find plausible transformations from the local to the global reference frame. We demonstrate our method’s significant advantages over the previous cloud dictionary approach, in terms of computational efficiency and memory requirements. In addition, We show its superior registration performance in comparison to a state-of-the-art, keypoint-based method (FPFH). For the evaluation, we use a challenging dataset of TLS local clouds and an ALS large-scale global cloud, in an urban environment.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


