【泡泡一分钟】基于均值偏移聚类方法的3D点云配准算法(3dv-49)
每天一分钟,带你读遍机器人顶级会议文章
标题:Registration of 3D Point Clouds using Mean Shift Clustering on Rotations and Translations
作者:Ido Haim Ferencz, Ilan Shimshoni
来源:3dv 2017 ( International Conference on 3D Vision)
编译:刘梦雅 周平
播音员:格子
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文介绍了一种新奇的3D点云配准算法。利用当前的3D点云描述子是由局部参考帧(LRF)组成的这一事实,与点云有关的LRFs可以用于估计点云间的相对旋转,因此匹配的内点对将会形成一个旋转矩阵的聚类,其大小和形状都是未知的。
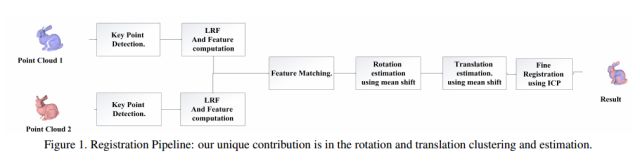
本文提出了一种基于均值偏移的聚类算法用于处理有噪声的旋转矩阵,并且找到了一种可以用于估计点云间的相对旋转的分布模式,且从匹配点对中估计平移向量。均值偏移方法同样可以帮助找到点云间的平移分量。下面是本文的算法框架。
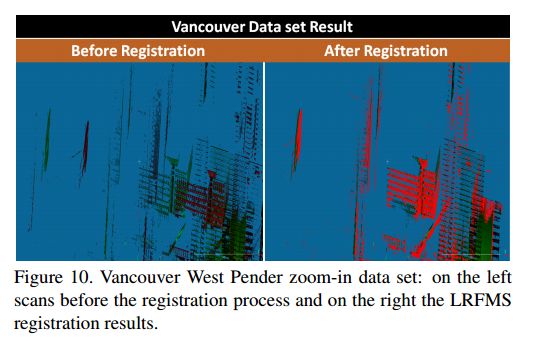
该算法已在不同类型的3D数据集(3D扫描仪,Lidar,以及运动结构恢复(SfM))上测试,结果表明该算法在精度和速度上都大幅超过一些当下的经典算法。
Abstract
In this paper a novel registration algorithm between 3D point clouds is presented. It exploits the fact that current 3D point descriptors (e.g., RoPS) are accompanied by local reference frames(LRF). LRFs of corresponding points are used to estimate the relative rotation between the point clouds. Thus, inlier matches will generate a cluster of rotation matrices. The size and shape of this cluster is unknown. We therefore develop a mean shift clustering algorithm for noisy rotation matrices. It finds the mode of the distribution to estimate the relative rotation. It is then used for estimating the translation vectors from the matched points. Here again mean shift is used for finding the translation component. The algorithm has been tested on different types of sources of 3D data (3D scanner, Lidar, and Structure from Motion(SfM)) of small scanned objects and urban scenes. In all these cases, the algorithm performed well outperforming state of the art algorithms in accuracy and in speed.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3dv-49”,即可获取本文下载链接。


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


