ECCV 2020 「场景解析」论文汇总
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文转自我爱计算机视觉
场景解析是一种特殊的语义分割,对整幅场景图像进行语义像素标注,典型应用是自动驾驶领域的道路环境的语义分割。
本文盘点 ECCV 2020 中所有场景解析(Scene Parsing)相关的3篇论文。
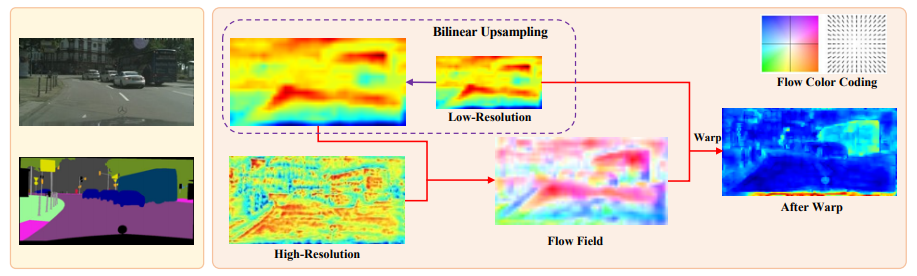
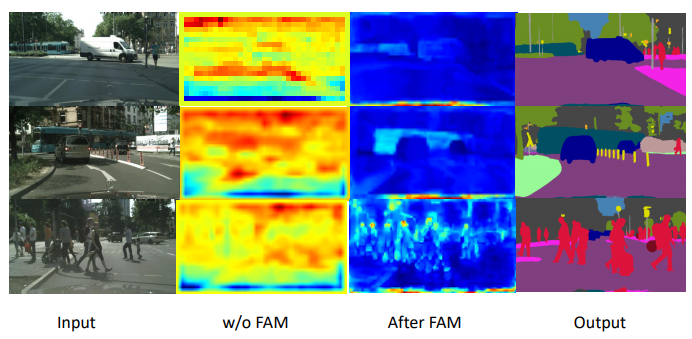
语义流用于快速精确的场景解析
Semantic Flow for Fast and Accurate Scene Parsing
作者 | Xiangtai Li, Ansheng You, Zhen Zhu, Houlong Zhao, Maoke Yang, Kuiyuan Yang, Yunhai Tong
单位 | 北大;华中电子科技;DeepMotion
论文 | https://arxiv.org/abs/2002.10120
代码 | https://github.com/lxtGH/SFSegNets(即将)
代码 | https://github.com/donnyyou/torchcv
备注 | ECCV 2020 oral
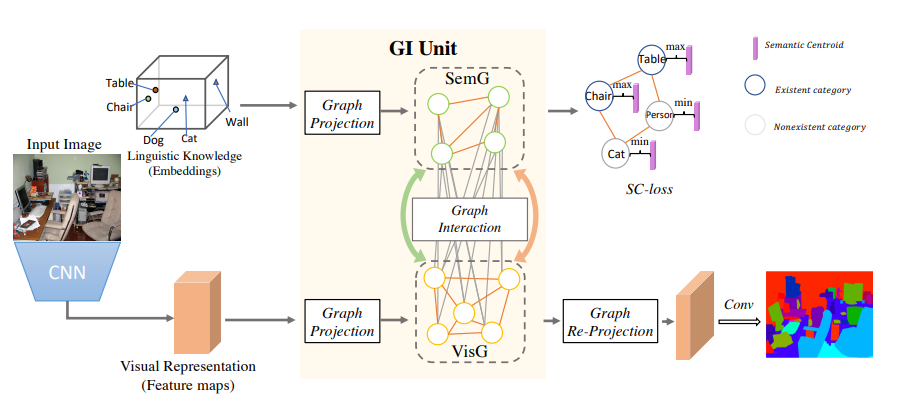
用于场景解析的图交互网络
GINet: Graph Interaction Network for Scene Parsing
作者 | Tianyi Wu, Yu Lu, Yu Zhu, Chuang Zhang, MingWu, Zhanyu Ma, Guodong Guo
单位 | 百度等
论文 | https://www.ecva.net/papers/eccv_2020/
papers_ECCV/papers/123620035.pdf
备注 | ECCV 2020
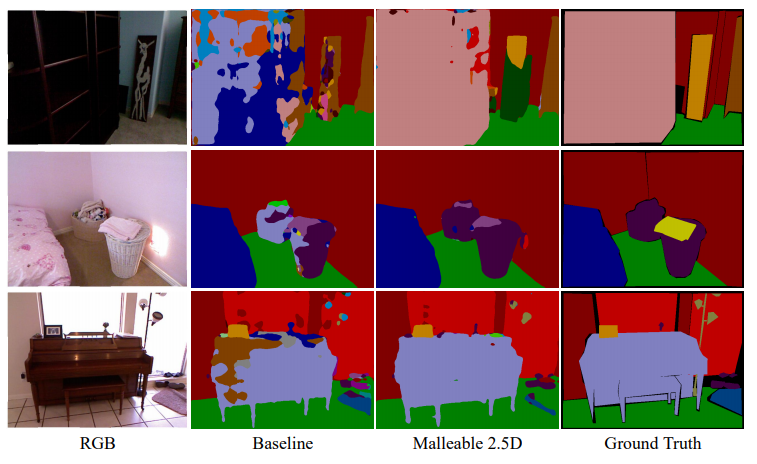
RGB-D传感器的场景解析
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓




