【论文推荐】最新5篇目标跟踪(Object Tracking)相关论文—并行跟踪和验证、光流、自动跟踪、相关滤波集成、CFNet
【导读】专知内容组整理了最近五篇目标跟踪(Object Tracking)相关文章,为大家进行介绍,欢迎查看!
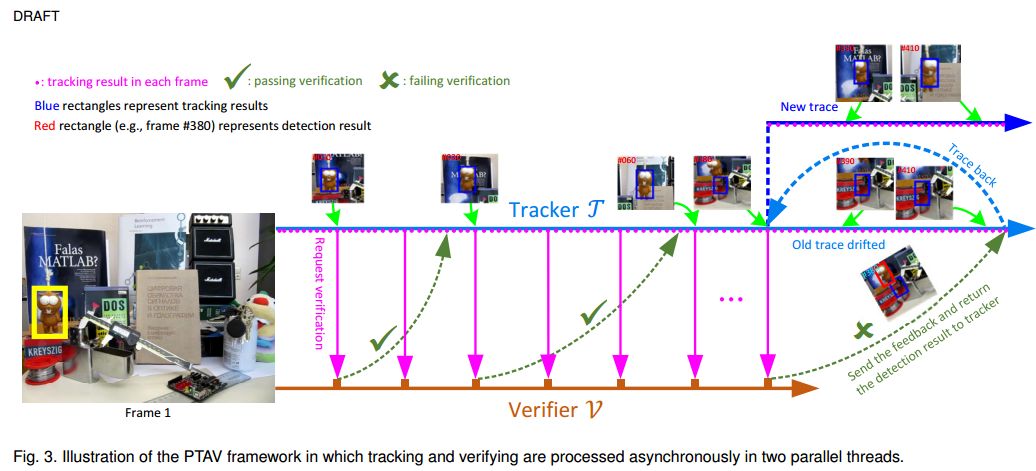
1. Parallel Tracking and Verifying(并行跟踪和验证)
作者:Heng Fan,Haibin Ling
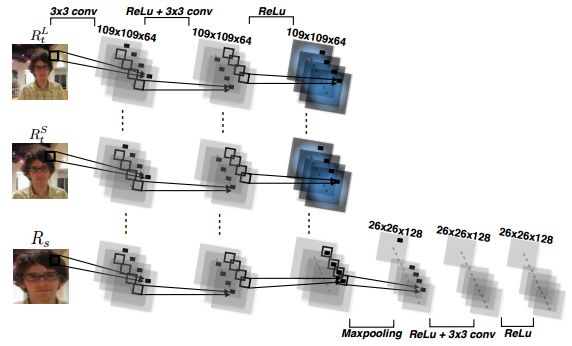
摘要:Being intensively studied, visual object tracking has witnessed great advances in either speed (e.g., with correlation filters) or accuracy (e.g., with deep features). Real-time and high accuracy tracking algorithms, however, remain scarce. In this paper we study the problem from a new perspective and present a novel parallel tracking and verifying (PTAV) framework, by taking advantage of the ubiquity of multi-thread techniques and borrowing ideas from the success of parallel tracking and mapping in visual SLAM. The proposed PTAV framework is typically composed of two components, a (base) tracker T and a verifier V, working in parallel on two separate threads. The tracker T aims to provide a super real-time tracking inference and is expected to perform well most of the time; by contrast, the verifier V validates the tracking results and corrects T when needed. The key innovation is that, V does not work on every frame but only upon the requests from T; on the other end, T may adjust the tracking according to the feedback from V. With such collaboration, PTAV enjoys both the high efficiency provided by T and the strong discriminative power by V. Meanwhile, to adapt V to object appearance changes over time, we maintain a dynamic target template pool for adaptive verification, resulting in further performance improvements. In our extensive experiments on popular benchmarks including OTB2015, TC128, UAV20L and VOT2016, PTAV achieves the best tracking accuracy among all real-time trackers, and in fact even outperforms many deep learning based algorithms. Moreover, as a general framework, PTAV is very flexible with great potentials for future improvement and generalization.
期刊:arXiv, 2018年1月30日
网址:
http://www.zhuanzhi.ai/document/45c04a939e1f953e23a33bd1464d6671
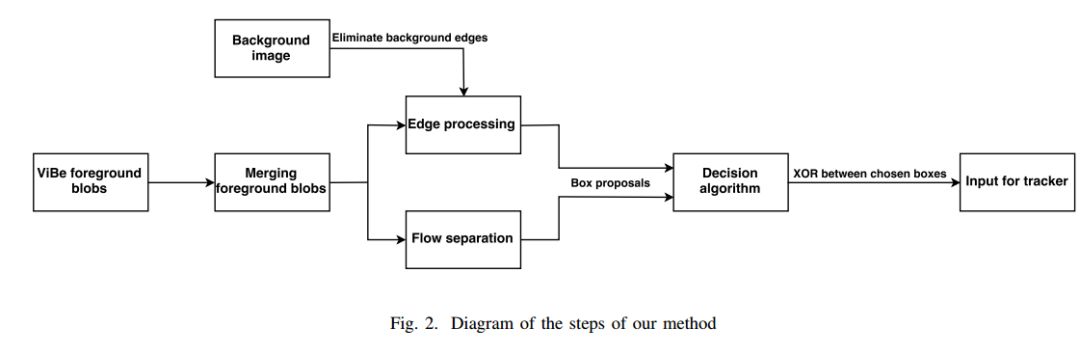
2. Improving Multiple Object Tracking with Optical Flow and Edge Preprocessing(利用光流和边缘预处理改进多目标跟踪)
作者:David-Alexandre Beaupré,Guillaume-Alexandre Bilodeau,Nicolas Saunier
摘要:In this paper, we present a new method for detecting road users in an urban environment which leads to an improvement in multiple object tracking. Our method takes as an input a foreground image and improves the object detection and segmentation. This new image can be used as an input to trackers that use foreground blobs from background subtraction. The first step is to create foreground images for all the frames in an urban video. Then, starting from the original blobs of the foreground image, we merge the blobs that are close to one another and that have similar optical flow. The next step is extracting the edges of the different objects to detect multiple objects that might be very close (and be merged in the same blob) and to adjust the size of the original blobs. At the same time, we use the optical flow to detect occlusion of objects that are moving in opposite directions. Finally, we make a decision on which information we keep in order to construct a new foreground image with blobs that can be used for tracking. The system is validated on four videos of an urban traffic dataset. Our method improves the recall and precision metrics for the object detection task compared to the vanilla background subtraction method and improves the CLEAR MOT metrics in the tracking tasks for most videos.
期刊:arXiv, 2018年1月30日
网址:
http://www.zhuanzhi.ai/document/0aa457a41d3f4db1122e2520c39ea7a9
3. Monocular Imaging-based Autonomous Tracking for Low-cost Quad-rotor Design - TraQuad(基于单眼成像的低成本四旋翼设计的自动跟踪)
作者:Lakshmi Shrinivasan,Prasad N R
摘要:TraQuad is an autonomous tracking quadcopter capable of tracking any moving (or static) object like cars, humans, other drones or any other object on-the-go. This article describes the applications and advantages of TraQuad and the reduction in cost (to about 250$) that has been achieved so far using the hardware and software capabilities and our custom algorithms wherever needed. This description is backed by strong data and the research analyses which have been drawn out of extant information or conducted on own when necessary. This also describes the development of completely autonomous (even GPS is optional) low-cost drone which can act as a major platform for further developments in automation, transportation, reconnaissance and more. We describe our ROS Gazebo simulator and our STATUS algorithms which form the core of our development of our object tracking drone for generic purposes.
期刊:arXiv, 2018年1月22日
网址:
http://www.zhuanzhi.ai/document/f0c42296bfa4c30a6dded3f718b89f9b
4. EnKCF: Ensemble of Kernelized Correlation Filters for High-Speed Object Tracking(EnKCF:高速目标跟踪的相关滤波集成)
作者:Burak Uzkent,YoungWoo Seo
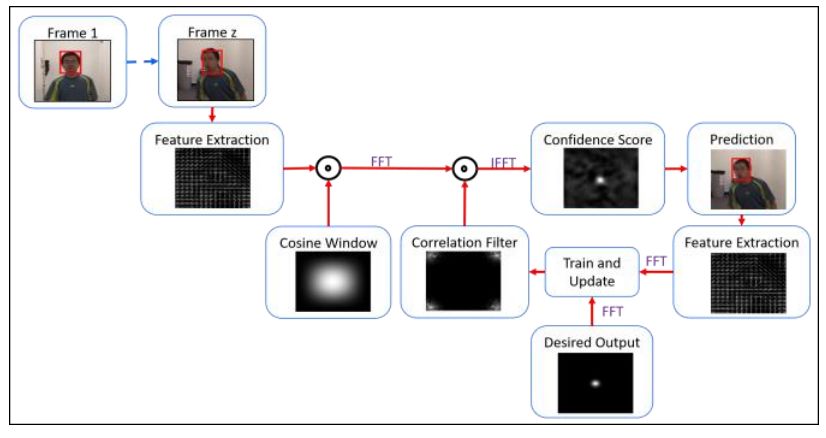
摘要:Computer vision technologies are very attractive for practical applications running on embedded systems. For such an application, it is desirable for the deployed algorithms to run in high-speed and require no offline training. To develop a single-target tracking algorithm with these properties, we propose an ensemble of the kernelized correlation filters (KCF), we call it EnKCF. A committee of KCFs is specifically designed to address the variations in scale and translation of moving objects. To guarantee a high-speed run-time performance, we deploy each of KCFs in turn, instead of applying multiple KCFs to each frame. To minimize any potential drifts between individual KCFs transition, we developed a particle filter. Experimental results showed that the performance of ours is, on average, 70.10% for precision at 20 pixels, 53.00% for success rate for the OTB100 data, and 54.50% and 40.2% for the UAV123 data. Experimental results showed that our method is better than other high-speed trackers over 5% on precision on 20 pixels and 10-20% on AUC on average. Moreover, our implementation ran at 340 fps for the OTB100 and at 416 fps for the UAV123 dataset that is faster than DCF (292 fps) for the OTB100 and KCF (292 fps) for the UAV123. To increase flexibility of the proposed EnKCF running on various platforms, we also explored different levels of deep convolutional features.
期刊:arXiv, 2018年1月21日
网址:
http://www.zhuanzhi.ai/document/ff41d8571ccb788c470bfbe4e1ca7296
5. Comparative Study of ECO and CFNet Trackers in Noisy Environment(噪声环境下ECO与CFNet跟踪方法的比较研究)
作者:Mustansar Fiaz,Sajid Javed,Arif Mahmood,Soon Ki Jung
摘要:Object tracking is one of the most challenging task and has secured significant attention of computer vision researchers in the past two decades. Recent deep learning based trackers have shown good performance on various tracking challenges. A tracking method should track objects in sequential frames accurately in challenges such as deformation, low resolution, occlusion, scale and light variations. Most trackers achieve good performance on specific challenges instead of all tracking problems, hence there is a lack of general purpose tracking algorithms that can perform well in all conditions. Moreover, performance of tracking techniques has not been evaluated in noisy environments. Visual object tracking has real world applications and there is good chance that noise may get added during image acquisition in surveillance cameras. We aim to study the robustness of two state of the art trackers in the presence of noise including Efficient Convolutional Operators (ECO) and Correlation Filter Network (CFNet). Our study demonstrates that the performance of these trackers degrades as the noise level increases, which demonstrate the need to design more robust tracking algorithms.
期刊:arXiv, 2018年1月29日
网址:
http://www.zhuanzhi.ai/document/aadb0ca8044e95024ab197a77d58a9b2
-END-
专 · 知
人工智能领域主题知识资料查看获取:【专知荟萃】人工智能领域26个主题知识资料全集(入门/进阶/论文/综述/视频/专家等)
同时欢迎各位用户进行专知投稿,详情请点击:
【诚邀】专知诚挚邀请各位专业者加入AI创作者计划!了解使用专知!
请PC登录www.zhuanzhi.ai或者点击阅读原文,注册登录专知,获取更多AI知识资料!

请扫一扫如下二维码关注我们的公众号,获取人工智能的专业知识!

请加专知小助手微信(Rancho_Fang),加入专知主题人工智能群交流!
点击“阅读原文”,使用专知!