【泡泡一分钟】3D物体的特征编码变种
每天一分钟,带你读遍机器人顶级会议文章
标题:A Variational Feature Encoding Method of 3D Object for ProbabilisticSemantic SLAM
作者:H. W. Yu and B. H. Lee
来源:International Conference on Intelligent Robots and Systems (IROS 2018)
编译:明煜航
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一种针对复杂三维物体中提取出的高级语义特征的特征编码方法。近年来,物体识别算法对于语义SLAM来说变得十分重要。然而,虽然三维物体的形状基本符合某一种复杂的概率分布,人们却没有足够重视这种三维物体的概率观测模型。更甚,现如今移动机器人装备有各种各样的传感器,但却只能从一个角度观测,导致很多关于物体形状的信息的丢失。这些限制是目前使用三维物体形状作为特征的语义SLAM和不依赖视角的闭环检测的最大障碍。
为了能够实现针对贝叶斯推断的数值分析,作者以易处理的分部来估计三维物体的真实观测模型。由于观测的似然可以由生成模型获得,作者使用贝叶斯网络来表示三维物体的真是生成模型。作者使用了变异的自动编码器来完整表达这复杂的分布。
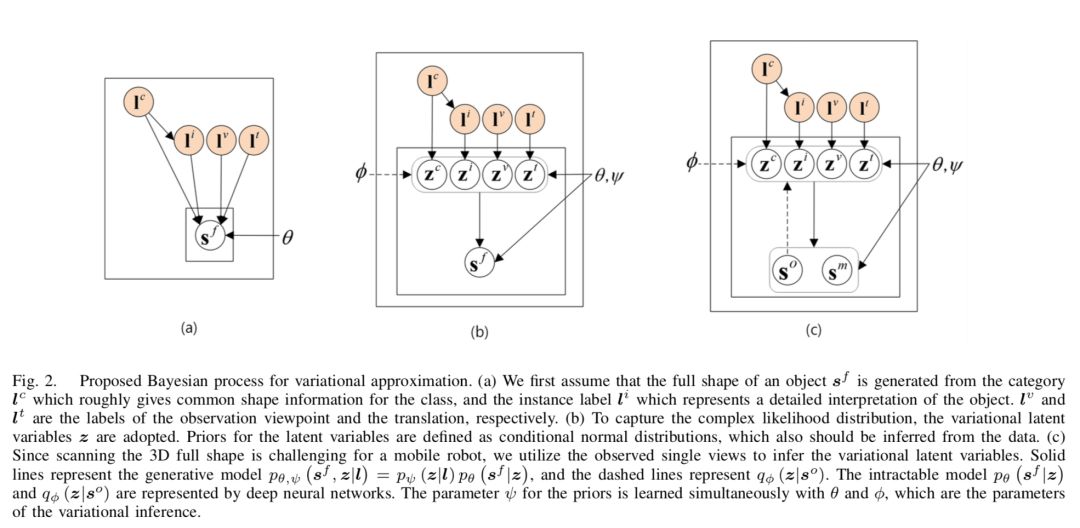
图2:本文提出的用于变形估计的贝叶斯处理过程
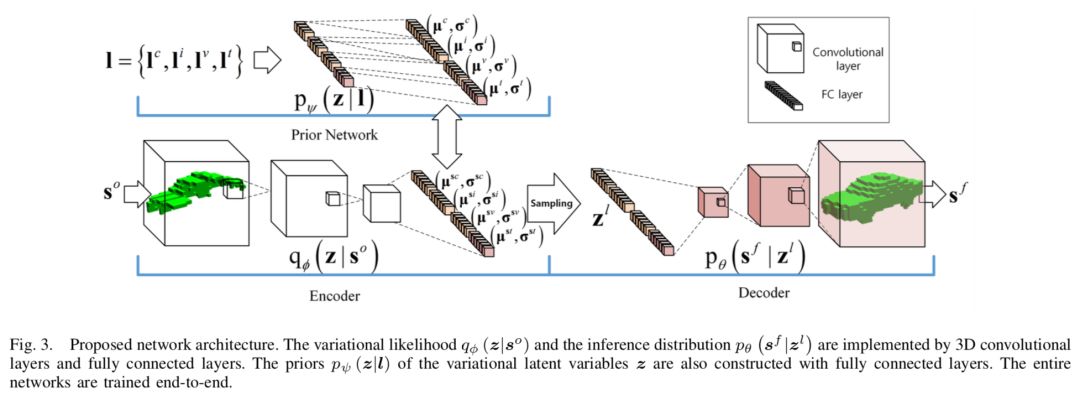
图3:本文提出的神经网络架构
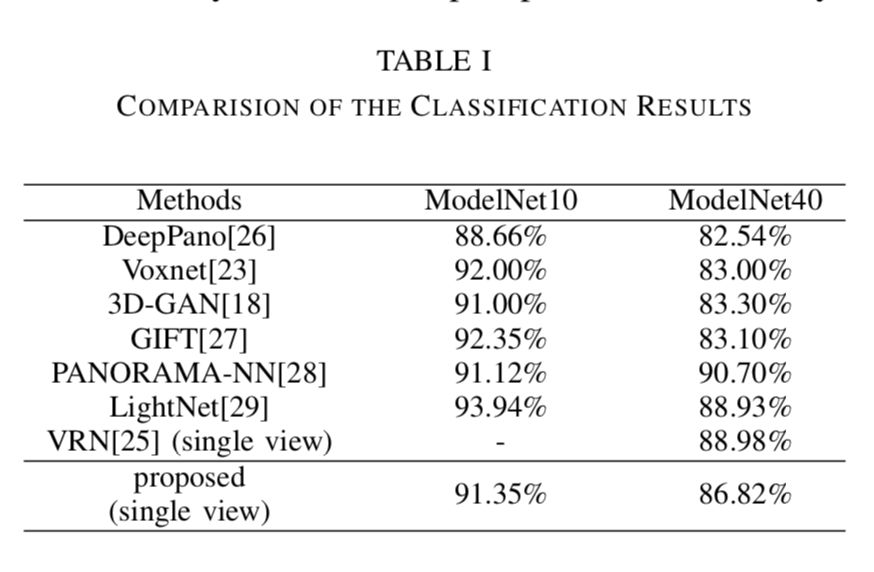
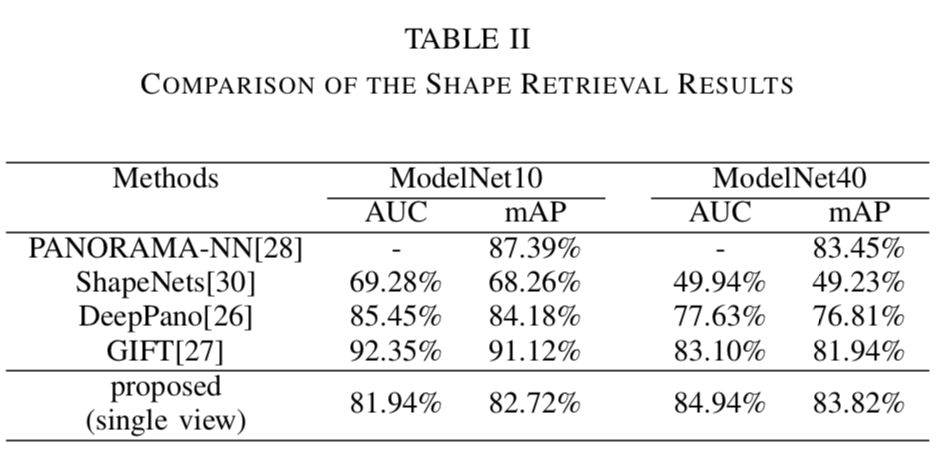
此外,作者还进行了使用基于最大似然估计的分类以及形状检索操作来分析估计的分布和编码的特征的性能。

Abstract
This paper presents a feature encoding method of complex 3D objects for high-level semantic features. Recent approaches to object recognition methods become important for semantic simultaneous localization and mapping (SLAM). However, there is a lack of consideration of the probabilistic observation model for 3D objects, as the shape of a 3D object basically follows a complex probability distribution. Furthermore, since the mobile robot equipped with a range sensor observes only a single view, much information of the object shape is discarded. These limitations are the major obstacles to semantic SLAM and view-independent loop closure using 3D object shapes as features. In order to enable the numerical analysis for the Bayesian inference, we approximate the true observation model of 3D objects to tractable distributions. Since the observation likelihood can be obtained from the generative model, we formulate the true generative model for a 3D object with the Bayesian networks. To capture these complex distributions, we apply a variational auto-encoder. To analyze the approximated distributions and encoded features, we perform classification with maximum likelihood estimation and shape retrieval.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




