为解决大洋上大气和海洋观测资料不足的问题,国际上有两个发展趋势。一是提高卫星遥感能力,发射多颗携带新型遥感器的卫星,应用多波段和主被动结合等技术改进气象和海洋卫星的遥感能力,同时发展卫星资料同化技术与模式。二是针对重点区域和特定天气海洋现象或科学研究目标,开展加强观测。
海洋气象观测技术研发进展

中国是海洋大国,海岸线漫长,沿海经济发达,临近大陆和岛屿的海域辽阔,蕴藏着丰富的资源;海上交通运输、渔业养殖、油气开采、科学研究、旅游和军事等活动日益频繁。然而,中国沿海地区以及濒临海域的气象条件和环境复杂,气候多变,经常发生海洋气象灾害,如大风、暴雨、大雾和海上强对流天气等。海上尤其是外海气象资料的缺乏,是造成对这些高影响天气生消演变科学认识不足及难以准确预报的主要原因之一。
以在卫星云图上极其壮观的台风天气为例,每年夏季来临的台风带来了降水和清凉,但台风又是极具破坏力的天气系统,其伴随的强风和暴雨经常造成严重的人员和财产损失。目前,对海上台风(飓风)生成的基本条件及演变规律已有一些认识,静止气象卫星能够监测和跟踪全球全部台风和热带气旋。但是,对热带气旋的生成、增强与变向运动的预报水平还很低,对其伴随的大风与强降水预报的不确定性很高。其主要原因之一是现阶段非常缺乏热带风暴、气旋和台风内外(尤其是内部)动力和热动力三维结构的详细直接观测资料;热带气旋(TCs)和台风强风浪条件下的海-气交换量的测量十分困难,需要开发先进的观测技术。
除了热带气旋和台风外,其他一些海洋灾害性天气(如海上大风、大雾和海上强对流天气等)的原位观测资料也很缺乏。中国对厄尔尼诺(El Nino)、西太平洋暖池、赤道辐合带以及印度洋和南海季风等重大海洋和大气现象的第一手监测资料严重不足。这种状况不仅限制了海洋-大气相互作用、台风生成与发展机理以及气候变化等研究的深入开展,而且极大地阻碍了海洋气象和水文环境预报能力的提高。要尽快改变这种状况,急需加强海上气象水文观测装备的部署与组网,发展海洋大气观测的新方法和新技术。为此,本文对国内外现有海洋气象观测技术进行综述回顾和展望。
海洋气象观测技术现状
为了增加对海上天气系统,尤其是灾害性天气系统生成与演变规律的科学认识,提高海上和沿海地区气象预报的准确率以及防灾减灾的能力,需要多种观测平台和多种观测技术提供海上气象要素信息。这些平台和技术包括卫星遥感、岛屿地面气象站与气象探空站网、油气平台和船舶自动气象站、海上锚定浮标、漂流浮标、有人驾驶飞机下投探空、岸基多普勒天气雷达等。
卫星遥感
由中国、美国、欧洲和日本等发射的多颗地球静止和极轨气象卫星,已形成了覆盖全球的气象遥感星座。静止卫星主要提供空间分辨率约 1 km和时间间隔约 5~30min的可见光、红外和水汽通道云图;极轨卫星提供更高空间分辨率的云图及其他遥感产品,如海表温度(SST)、气溶胶光学厚度(AOD)等,进行大气温度和水汽廓线的红外与微波遥感。海洋卫星上的一些传感器(如散射计、合成孔径雷达、高度计和微波辐射计)已成为海上风场监测的重要技术手段,获取的资料在海上强天气的监测与数值模式中得到了应用。过去20年来发射的各类地球观测研究卫星(如 EOS/A-Train系列卫星和全球降水任务卫星 GPM等),提供了大量更高空间分辨率的气象产品数据。这些气象、海洋和地球观测卫星都有专门网站介绍,其产品数据大都可以共享下载,多国不定期公布其气象卫星发展规划,如世界气象组织(WMO)关于空间项目的专门网页:http://www.wmo.int/pages/prog/sat/index_en.php。
岛屿和油气平台站
固定的岛屿和油气平台站的气象观测项目、仪器设置和规范与陆地站的并无差别,主要提供温度、气压、湿度、降水、风速和风向等资料;有些同时配备海洋水文观测设备,测量海温、海盐、海浪和海流等参数。一些近岸的无人岛礁上也开始安装自动气象站,通过卫星通讯实时传回其观测资料,对气象部门提高海上气象预报准确率和海事部门成功开展海上救助等工作起到了促进作用。
但是,这些岛礁和油气平台站点与陆地台站相比,更加受限于地理位置,观测设备架设的面积更加有限。海上岛屿和油气平台站较少,不能像陆地上一样形成有效覆盖很大区域的台站网。除了海南和台湾省的几个大岛上有气象探空站,中国在远海海岛上的气象站极少,在全球几大洋上没有长期运行的海岛气象探空站。
船舶观测
船舶观测主要由志愿观测商船(VOS)进行,每 3小时观测一次,观测的气象要素有:风向、风速、最大风速、气压、3小时变压、温度、露点温度、能见度、总云量等。在中国周边海域航行的 VOS约有 30艘,而在地中海上有上百艘,多条南北和东西向的固定航线形成了很好的时空覆盖。自动船载高空气象计划(automated shipboard aerological programme,ASAP)在志愿船上释放气象探空仪,获取大气廓线资料,但其数量很少。
由于船舶位置和数据变化较大,船舶气象报告的连续性较差。在非常恶劣的海况下,VOS 只能停航或改变航线,所以不能提供恶劣天气时的气象信息。此外,VOS上安装的气象观测设备来自不同部门和厂家,其观测规范、元数据编解码和资料传输分发等需要协调管理,由世界气象组织(WMO)和政府间海洋委员会(IOC)的海洋学和海洋气象学联合技术委员会(JCOMM)的船舶观测组(ship observation team,SOT)负责(https://www.jcomm.info/)。
国内外不同部门或研究机构每年都组织使用科学考察船开展海上综合科学考察,一些科考船上装备了自动气象站和无线电探空设备,以获取航线上的气象资料。但科考船的观测费用高,获取的资料在时空覆盖上十分有限。全球海洋船舶水文调查项目(global ocean ship-based hydrographic investigations program,GO-SHIP)以其观测网络作为参考线(reference lines),在比较固定的大洋航线上监测海表和次表层海洋参数以及海洋中碳、营养盐类、溶解氧和瞬态示踪剂等海洋健康状态参数,但其海洋参数资料对气象研究与业务的贡献还有待提高。
锚定和漂流浮标站
为了提高海上尤其是远海观测的时空覆盖度,各海洋大国都在海上部署锚定浮标,进行气象和水文观测。浮标站抗恶劣风浪能力强,能按规定要求长期连续地为海洋气象预报和海上交通安全保障等提供海洋气象观测资料。美国国家海洋和大气管理局(NOAA)下设的国家浮标数据中心(National Data Buoy Center,NDBC),专门负责布设和管理海上浮标以收集实时和长期的海上气象观测数据。NDBC在太平洋沿岸附近海域、美国东海岸附近海域和太平洋中部,共布设了约1200 个浮标和锚标(http://www.ndbc.noaa.gov/obs.shtml),在太平洋赤道地区和阿拉斯加湾海域相对密集。在中国周边(0~60° N,105~130° E)海上的浮标站每小时发布一次气象观测数据,主要布设在韩国附近海域和日本南部附近海域。
每年,多国多机构都会在海上投放一些漂流浮标,测量的气象和海洋参数有很大的差距,从单一参数(如气压或 SST)到多参数(通常包括气压、气温、SST和波浪等)。海上 1400 多个漂流浮标的观测资料也由 NDBC负责收集、分发和管理。
“海洋站点(Ocean SITES)” (https://dods.ndbc.noaa.gov/oceansites/)是一个多学科研究参考站网(包括海-气通量、物理、生物地球化学和生态观测),在远海部署观测从海面一直到海底十多个大气和海洋变量,实时和长期获取的资料作为其他站网观测和遥感产品的参考标准。
深潜至水下1000~2000 m的 Argo阵列不仅在监测各大洋海平面上升、海洋热容量和气候变化研究等方面发挥了巨大作用,还提供次表层的温盐流廓线资料,有效地服务于中深层大洋环流监测和模拟、ENSO监测和预报、月际尺度气候预测。但其较长的下潜和上浮周期,使其所获资料在海洋天气服务方面的作用受到限制。
多种雷达
许多大岛屿和海岸带地区架设了多普勒天气雷达(以 S波段为主),一些科考船和大型船舶上也安装了 C或 X波段的天气雷达,用于监测海上的台风、雷暴、定量降水估计和风场反演。岛基和岸基风廓线雷达能够提供雷达上方风速和风向的垂直分布,为天气分析和预报提供动力学信息。全球岸基和船基高频(HF)地波雷达站网,不仅实时测量提供海流信息,还能同时提供海面风场和海浪的资料。
飞机平台
飞机是理想的机动大气观测平台。机载原位观测气象传感器提供飞行路线上的多种要素资料,穿云时还能提供云和降水内部的微物理参数资料。飞机上安装下投气象探空装置,能够实施从飞行高度至海面的气象要素廓线探测。例如,为了实时获取台风(飓风)内部的温度和风场分布信息,提高台风路径和强度的预报准确度,美国 NOAA 的飓风研究部(HRD)与一些飓风研究机构(如佛罗里达的国际飓风研究中心IHRC、NOAA的飞行运行中心 AOC、国家飓风中心 NHC等)持续多年开展飓风下投探空作业,获得的探空廓线已达1万4千多条。
有时飞机在海上还下投漂流浮标或机载抛弃式温度剖面仪(AXBT)。为了同时研究飓风内大气边界层和上层海洋混合层结构,1984 年美国空军的 C-130 飞机首次在飓风 Josephine预测路径的前方下投了 3只漂流浮标,浮标上装备了气象和海洋传感器。浮标部署10小时后,NOAA的 WP-3D飞机在 700 hPa高度穿越飓风进行边界层探测试验,飞机上搭载了包括多普勒天气雷达、多频段微波辐射计、下投海流剖面仪和测波浪方向的侧视雷达等多种设备。观测显示,飓风 Josephine 下方海洋有一些中尺度现象与特征。自 1997年,NOAA的热带预报中心(TPC)和飓风研究部(HRD)开始实施热带气旋(TCs)及其环境的业务天气监测任务(operational synopticsurveillance missions),使用飞机下投探空仪和 AXBT。数据分析表明,热带气旋的环境与内核 SST差与其后续的强度变化有一定的关系,内核SST变化的减小对应 TCs的增强。2003年开始,中国台湾省多单位合作使用 Altra喷气有人驾驶飞机对接近台湾地区的台风进行监测,主要开展下投探空(6小时航程投 20个探空仪)。自2013 年,台湾的近岛台风监测下投观测(DOTSTAR— http://typhoon.as.ntu.edu.tw/Activity.htm)由研究阶段转入气象局的常规业务,香港地区也加入了这一业务工作。
微小型无人飞机用于气象探测已有 20 多年的历史。中国较早地应用微小型无人飞机开展近海台风的观测试验。2000—2005年,中国台湾省学者使用澳大利亚研制的 Aerosonde(微小型无人机探空仪)开展了台风观测试验,Lin等较详细地介绍了该型无人探空仪穿越台风“龙王”的飞行情况和一些资料分析结果,显示微小型无人机自主探空仪可以实现等高度水平和台风眼内垂直飞行探测,获得风、气压、温度和湿度等实地观测资料。
近十年来,美国军用无人机全球鹰(global hark)也加入到(海洋)气象观测行列中来。该型无人机续航时间长达 30 h,飞行高度高达 20 km,有效载荷大,可以搭载多种大气原位观测和遥感仪器,进行长航程的机动气象观测。美国 NOAA和航空航天局(NASA)合作,已使用全球鹰无人机对多个飓风进行了观测,一次飞行可以下投80只探空仪。
技术比较
广阔大洋上的气象和水文观测站点非常稀少,因为大洋上可以建立气象和水文观测站的岛屿不多。海洋气象观测资料在先进国家主要由卫星遥感、商船气象报告和非业务性飞机观测提供,但比起陆地台站网所提供的资料,无论在质量还是数量上都有极大差距,不能满足科研和业务需要。表 1列出当前采用的主要海洋气象观测技术,简要比较了它们的优势和不足。
表 1 海洋气象观测技术比较
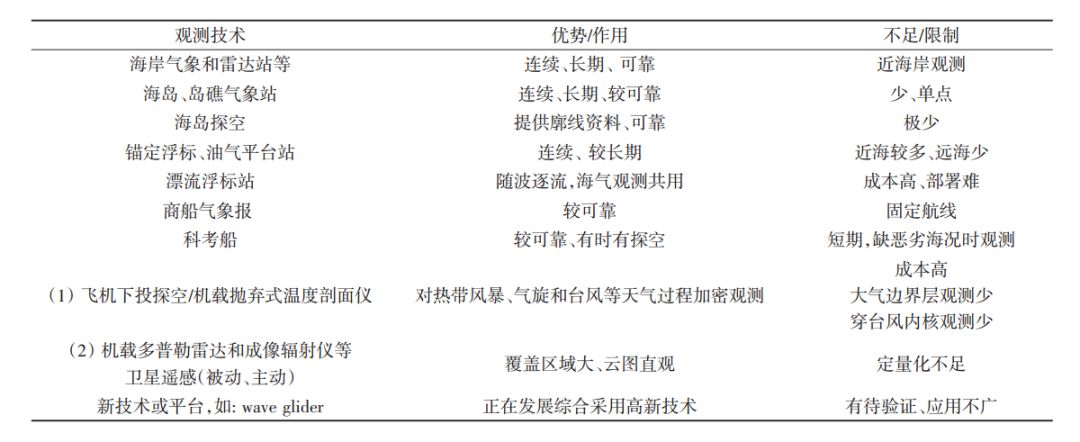
与国际先进水平相比,中国周边广阔海洋上部署的气象和水文观测站点稀少,近海布置的浮标也不多,少量商船提供不连续、分散的气象海况报告。因成本大、维持费用较高以及没有海外观测基地,中国还没有大气海洋环境观测研究的专用飞机平台。中远海缺少气象探空站网,少有对流层大气廓线(尤其是台风中)的立体剖面观测资料。海洋-气象-生态等海上监测网络规模较小,缺乏对赤道辐合带(ITCZ)、太平洋暖池、El Nino及海上季风(爆发)等现象的实时有效的监测,而这些现象或过程对中国的天气和气候变化有重大的影响。
海洋气象观测技术发展趋势
为解决大洋上大气和海洋观测资料不足的问题,国际上有两个发展趋势。一是提高卫星遥感能力,发射多颗携带新型遥感器的卫星(如 EOS 系列卫星),应用多波段和主被动结合等技术改进气象和海洋卫星的遥感能力,同时发展卫星资料同化技术与模式。二是针对重点区域和特定天气海洋现象或科学研究目标,开展加强观测,例如 TOGA-COARE科学试验中使用多艘科考船、多架次飞机和浮标系统组网观测;由于该科学试验促进了 El Nino的研究与预测,使得热带观测阵列(TAO)的锚定浮标得以部署和长期运行。
为了扩大全球和区域海洋气象与环境观测的时空覆盖度,需要多国多机构的多观测网络之间的协作。自 2004年,中国科学院南海海洋学研究所组织实施了一系列年度开放航次,对南海海流和海气相互作用进行观测研究,同时与中国气象局广州热带海洋气象研究所及广东省气象局等单位合作建立了固定站进行长期观测记录,还部署了锚定和漂流浮标等,从而经过 10来年的努力建立起一个覆盖南海的中尺度水文和海洋气象观测网络。
美国 NOAA下属的集成海洋观测系统(IOOS)是一个国家/区域海洋和沿海综合合作观测研究系统,由 11个观测子系统组成,观测范围包括美国所有沿海地区、太平洋中部、北冰洋、加勒比海和五大湖地区,可以提供历史和实时的海洋与大气综合观测数据。该集成观测系统包括 21个物理海洋实时观测系统,210个实时国家水位观测网(其中 181个配备了气象传感器),103个国家浮标数据中心的浮标和 200 个国家海浪观测站。2013年,IOOS委员会向美国国会提交的报告中指出,在广大的海洋上非常缺乏海洋综合观测站点,而现有的站点只能关注单一站点的海洋环境变化。为了改变这一现状,美国正在动员商船、渔船、海上能源开发平台和休闲船只加入这一集成观测系统,同时重点发展自主遥控船进行海洋综合观测数据的采集。
随着卫星导航、无人驾驶、卫星通讯和传感器技术的发展,近 10年来科技人员已研发了基于无人水面艇(USV)和自动水下航行器(AUV)的海洋水文与气象观测系统,具有自动部署、长航时、人员安全等优点。例如,美国 Liquid Robotics公司于 2007年研制的一款长航时自主航行的水面无人艇(wave glider),2009年始正式启用,它可以连续一年以上以走航或驻点方式在海上收集和传输海洋气象水文实时观测数据,也可以预先部署在敏感海区为海洋、气象和环境灾害提供前期预警;经过 10年来的发展,目前该无人艇是世界上最成熟和最实用的自主航行水面无人艇。该无人艇下部收集波浪,能为航行提供动力,上部太阳能板收集太阳能,主要为定位、探测传感器和通讯等子系统提供能源。所以,该型艇不需要船员和燃料,无任何排放,不用考虑人员出海的风险和对环境的影响,部署和维护费用远远低于锚系浮标和有人观测船。至今,执行各种任务的太阳能穿浪航行器超过 300 艘,累计航行时间44200天,航程达到 150万海里(绕地球 69圈),单艘航行最大距离为 9384海里,历时 14个月成功穿越了太平洋。该型太阳能滑浪无人艇经历了极端恶劣的海上环境,成功穿越了 17个飓风。2014年 07月 17日,该型无人艇遭遇太平洋近40年来最强台风“威马逊”并穿越台风眼,持续风速 64 m/s,最大风速 78 m/s,最大浪高 13.7m,并保持正常观测,获得了实时海面气象要素及海温、海盐和海流数据。
太阳能滑浪无人艇的长航时和持续定点观测能力,使其非常适合在远海海域进行观测,并将高时间分辨率的观测数据通过通讯卫星实时传输回相关业务和科研单位;可以根据用户的需求配置众多海洋、气象、环境监测和测绘仪器。Lenan 和 Melville(2014)使用穿浪器穿过热带气旋时的原位观测资料,对气象要素的变化进行了分析。2014 年 4 月,NOAA 与 Liquid Robotics 公司签署了多项旨在提高海洋天气预报和海洋环境监测能力的合作协议。无人艇观测数据与 NOAA的数据分析和模式开发相结合已经提高了 NOAA飓风预报、CO2 的观测和北极海洋环境的监测能力。2016年 8月,Liquid Robotics 公司与日本相关部门合作在日本周边海域部署 8艘无人船组成了日本海首个无人船气象海洋观测网并投入业务运行,为日本相关部门提供实时气象和海洋监测数据。
美国 Saildrone 公司(http://saildrone.com/)与海洋科学技术基金会(MSTF)合作,研制成功一款自动驾驶双体帆船(SD1),可以完全利用风帆推进航行;该型船长约 5.8 m,平均航速 3~5 节,最大速度达 14 节。到 2013年底,SD1在太平洋海上航行超过 100天,航程 5000多英里,经受了恶劣海况。该公司计划在将来用 SD1取代海洋中的锚系浮标,进行海洋气象的观测。
近十年来,无人海洋航行器(UMV)的研发与应用在国内也蓬勃开展起来,从无人水面艇到深海水下滑翔机的海上实验与应用被不断报道。自 2014年始,中国科学院大气物理研究所一个团队研制了两款半潜式海洋气象观测专用无人艇。半潜式无人艇艇身大部分处于水线之下,平台上部安装气象传感器和通讯导航天线等部件,其特点之一是航行时较为稳定,有利于水面的气象观测(尤其是水平风的测量),另一个特点是抗风浪能力强,不会倾覆。一款由全太阳能供电运行,白天按预设航线自主航行并充电,晚上处于漂浮状态,但仍连续观测并发送数据;该太阳能艇平均航速达到 3节,设计最大航时大于 180天,已安装自动气象站、波浪仪和海温海盐传感器等,经过多次海上试验,最长航行5天,取得了连续的多要素观测数据。另一款采用柴油发电机提供动力和电力,平均航速可达到 7节,设计航时大于 30天,除了安装自动气象站和多层海温、海盐传感器外,还创新性地加装了气象火箭探空设备,能够装载 24(长)或 48(小)枚探空火箭,探测高度 1.2~8 km。2次渤海海上成功试验表明,该型艇可成为海上自主部署与回收的流动自动气象站和探空站。近期,两款无人艇气象观测系统将进行大于 3个月的长航时海上观测试验与示范应用。
总之,使用新型海洋穿浪器无人驾驶平台的海洋气象水文探测技术是当前的主要发展趋势,为国际上各大海洋观测组织和计划所关注,所以,在 2017年,海洋学和海洋气象学联合技术委员会协调并建立了海洋穿浪器网站(www.OceanGliders.org),以更好地收集、处理和利用全球穿浪器获取的资料。
海洋气象观测技术发展展望
从海洋气象观测技术综述与当前发展趋势分析可以看出:(1)海上尤其是远海的气象观测还存在很大的时间和空间空白区;(2)强风浪条件下海-气交换、海洋次表层、海洋大气边界层和垂直探空观测方面,还缺乏有效而又经济的技术手段或平台;(3)海上无人驾驶观测平台及搭载的传感器有待更多试验与验证,其航行时间和速度都有待提高,协同组网综合观测技术尚不成熟,需要参考 Argo制定相应的技术标准、观测规范和资料格式等。
2017 年 10 月,JCOMM 发布了下一个 10 年远景白皮书,其中第一个要实现的关键战略目标就是:致力于发展目的导向、集成和技术先进的海洋观测系统,以支持全球快速增加的天气、气候和海洋服务。JCOMM下属的观测协调组(OCG)负责制定 5年工作计划,协调确定观测需求、观测系统实施、资料管理与集成以及标准化和实现。
为了快速、有序和节约地建设好中国的海洋气象综合观测系统,除了加强多部门多机构的协调合作,积极参与国际合作与资料共享外,还需要采用系统工程的思想开展建设,加强顶层设计,识别出海洋气象、气候和环境业务与研究所需的观测参量及其要求;需要增加支持力度,鼓励产学研用结合,研发与验证新型海洋气象观测技术,包括基于无人船的自主航行部署的气象水文观测系统以及快速机动的气象探测无人机系统;构建覆盖全球海洋的多观测平台与多观测网络相互补充协作的新型高智能化的气象环境观测体系,为“数字海洋、智慧海洋”建设提供更加丰富的信息。
基金项目:国家自然科学基金重大科研仪器研制项目(41627808)
参考文献(略)


登录查看更多
相关内容

它的目的是理解计算的本质,并因此提供更有效的方法。所有介绍或研究数学、逻辑和形式概念和方法的论文都是受欢迎的,前提是它们的动机显然来自计算领域。理论计算机科学发表的论文按其性质分为三个部分。第一部分“算法,自动机,复杂性和游戏”致力于研究算法及其复杂性,使用分析,组合或概率的方法。它包括抽象复杂性的整个领域(即,所有可以使用图灵机器定义的层次结构的结果)、自动机和语言理论的整个领域(包括无限词和无限语言的自动机),整个几何(图形)应用领域和使用统计方法测量系统性能的整个领域。官网链接:https://www.sciencedirect.com/journal/theoretical-computer-science/about/aims-and-scope
专知会员服务
26+阅读 · 2019年12月5日
Arxiv
6+阅读 · 2018年1月10日



相关VIP内容
专知会员服务
26+阅读 · 2019年12月5日
相关资讯
相关论文
Arxiv
6+阅读 · 2018年1月10日