【泡泡点云时空】PPFNet:三维点鲁棒匹配的全局上下文感知局部特征(CVPR2018-9)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:PPFNet: Global Context Aware Local Features for Robust 3D Point Matching
作者:Haowen Deng Tolga Birdal Slobodan Ilic
来源:CVPR2018 (IEEE Conference on Computer Vision and Pattern Recognition)
编译:徐二帅
审核:李敏乐
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

我们提出了点对特征网络(PPFNet ,Point Pair Feature NETwork),该网络通过深度学习得到全局信息3D局部特征描述子,从而在无序点云中找到对应特征点。PPFNet在纯粹的几何空间中学习局部描述子具有很强的全局上下文感知能力,成为深度学习的重要线索。我们使用点对特征、单点以及邻域计算得到的法向量作为一个整体来表征3D信息。置换不变网络的设计受到PointNet的启发将PPFNET设置为与顺序无关。与体素化思想相反,我们的方法直接输入原始点云充分利用其稀疏性。PPFNET使用一种新颖的N元拓扑损失方程(N-tuple损失方程)能够将全局信息自然的投影到局部描述子上,实验表明上下文感知同样提高了局部特征表示,定性定量的评估表明PPFNET能够增强召回率,提高特征提取的鲁棒性和不变性,同样证明了PPFNET是3D描述子提取的重要步骤。
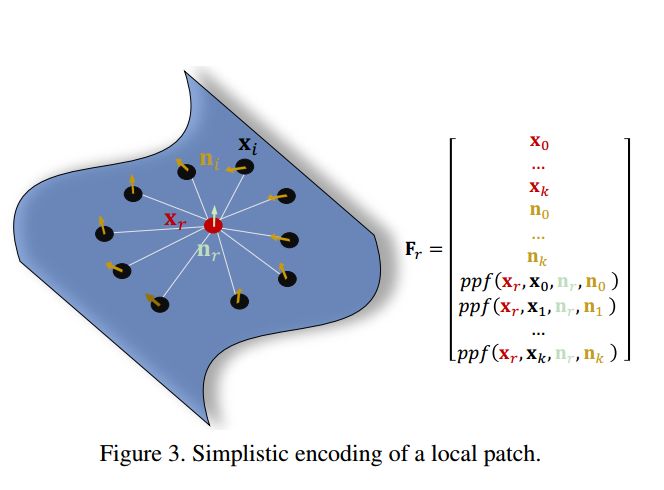
图3展示的是我们构建的局部几何描述,该描述包含的法向量和PPFs特征,将作为PPFNet的输入构建全局信息三维局部特征描述子。
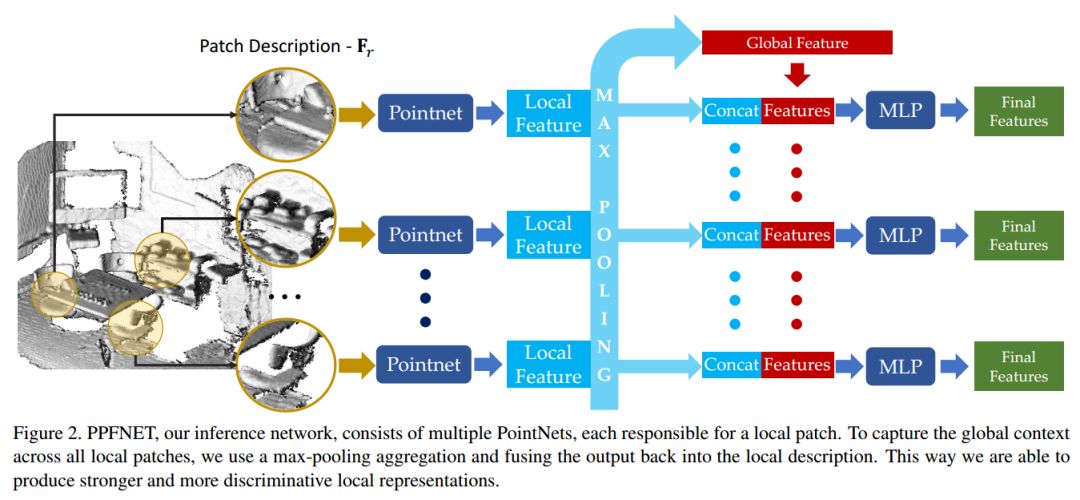
图2展示了PPFNet的完整结构,结构中包含多个PointNet,每个PointNet负责一个局部区域,我们使用最大池化聚合并将输出融合到局部描述子中,使用一组MPL进一步融合全局和局部特征得到全局上下文感知局部描述子,通过这种方式能够得到更具有辨别性的局部特征。
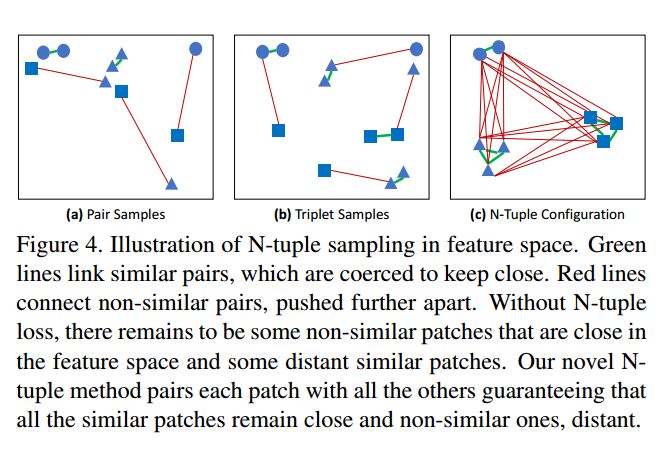
图4展示了在特征空间中进行N-tuple采样,绿线连接了相似的点对,红线连接非相似点对,在特征空间中仍然会存在非相似区域在距离上表现的相似,我们提出的N-tuple的方法能够保证所有点区域中相似区域仍能保持相似特性,非相似区域距离被拉开,提高特征辨别能力。
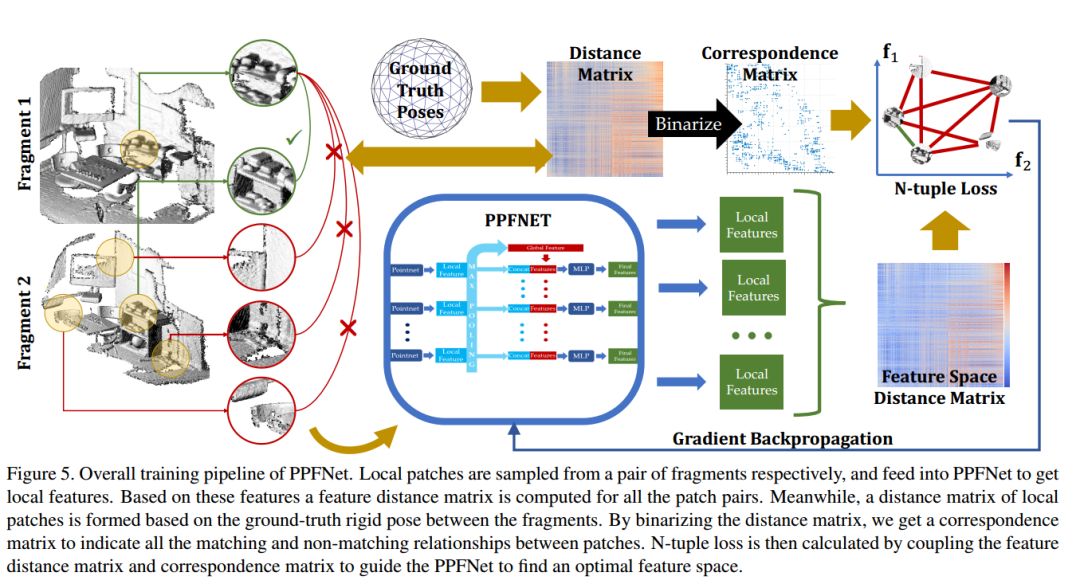
图5展示了PPFNet训练的整个流程,首先从包含公共区域的点云中分解出局部小点云块,将局部块输入到PPFNet中得到局部特征,计算所有特征的特征相似矩阵,同时通过真实的两点云刚性姿态计算局部块间的距离矩阵,通过对距离矩阵进行二值化,得到一个对应矩阵来表示局部块之间的所有匹配和非匹配关系。然后,通过耦合特征距离矩阵和对应矩阵来计算N-tuple,使得PPFNet找到最优特征空间。

Abstract
We present PPFNet - Point Pair Feature NETwork for deeply learning a globally informed 3D local feature descriptor to find correspondences in unorganized point clouds. PPFNet learns local descriptors on pure geometry and is highly aware of the global context, an important cue in deep learning. Our 3D representation is computed as a collection of point-pair-features combined with the points and normals within a local vicinity. Our permutation invariant network design is inspired by PointNet and sets PPFNet to be ordering-free. As opposed to voxelization, our method is able to consume raw point clouds to exploit the full sparsity. PPFNet uses a novel N-tuple loss and architecture injecting the global information naturally into the local descriptor. It shows that context awareness also boosts the local feature representation. Qualitative and quantitative evaluations of our network suggest increased recall, improved robustness and invariance as well as a vital step in the 3D descriptor extraction performance.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以点击“阅读原文”获取。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



