上交大本科毕业,获ICRA最佳学生论文、机器人控制双奖项,这个小哥的机械手玩球技术娴熟
机器之心编辑部
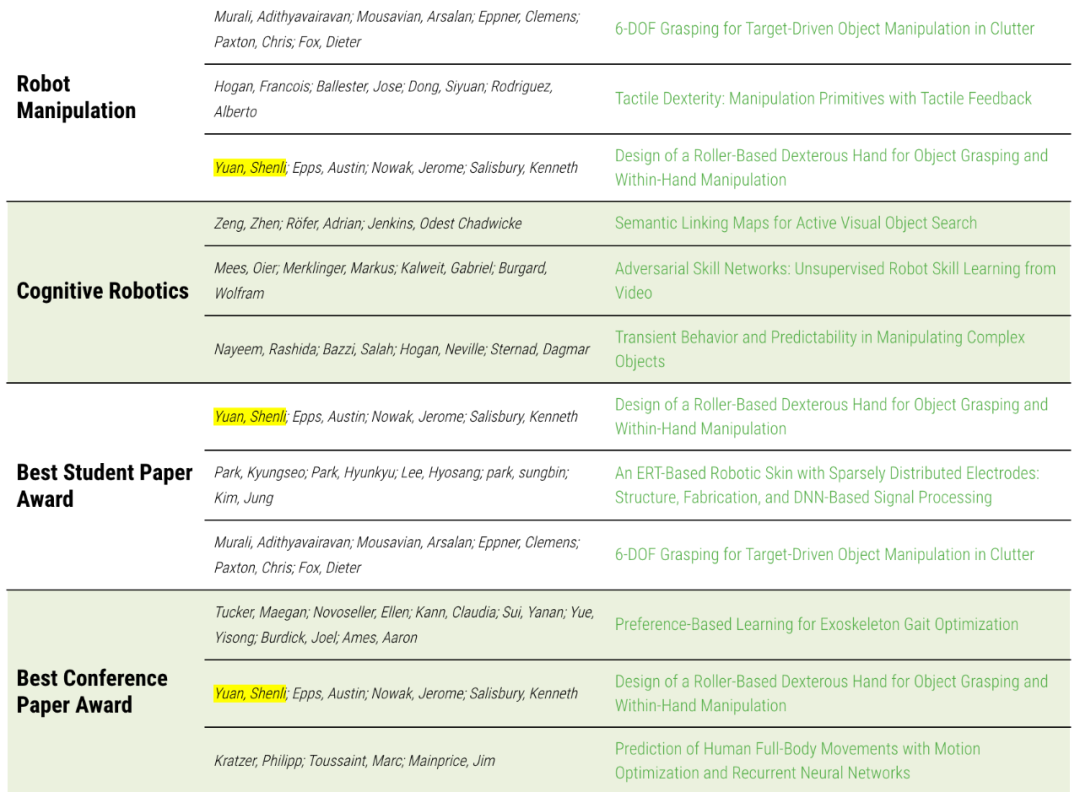
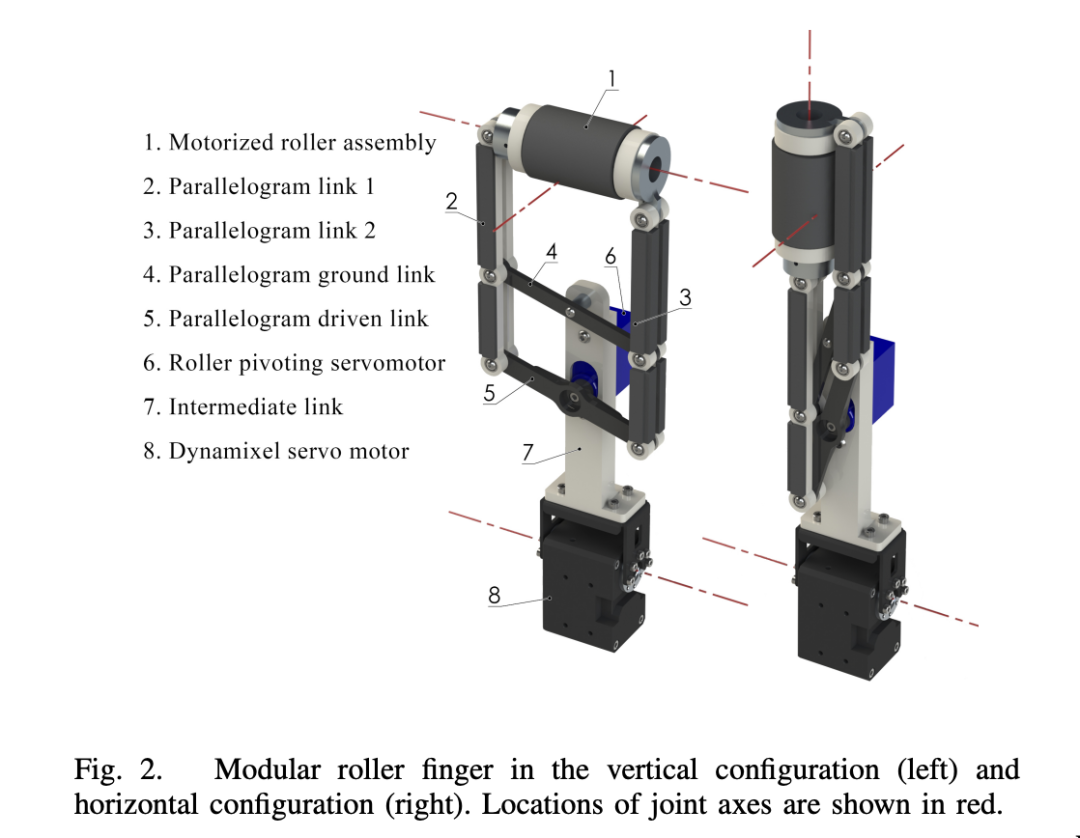
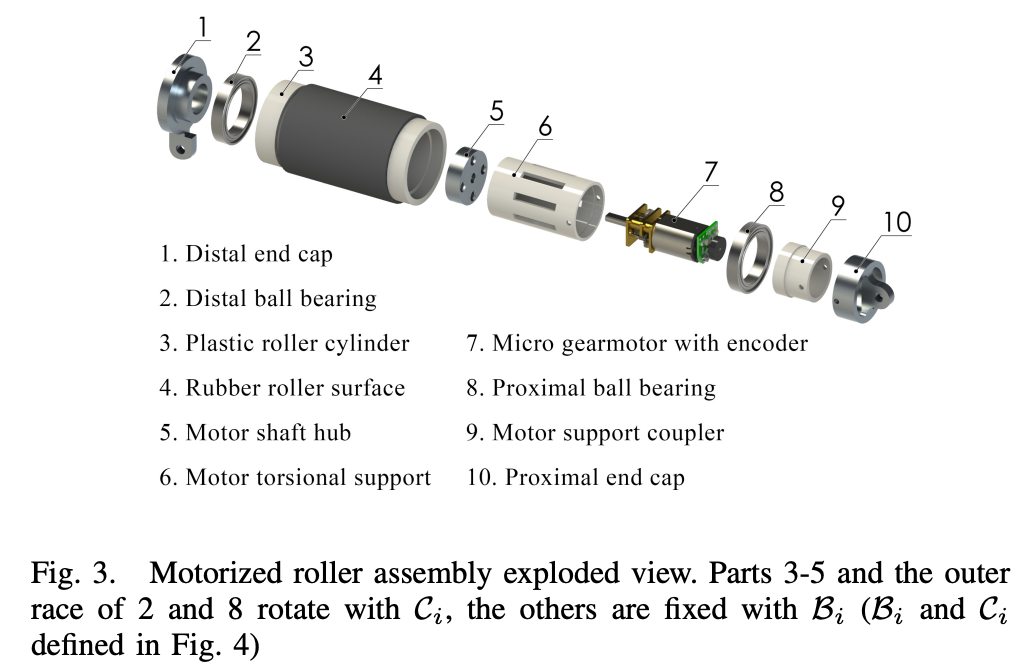
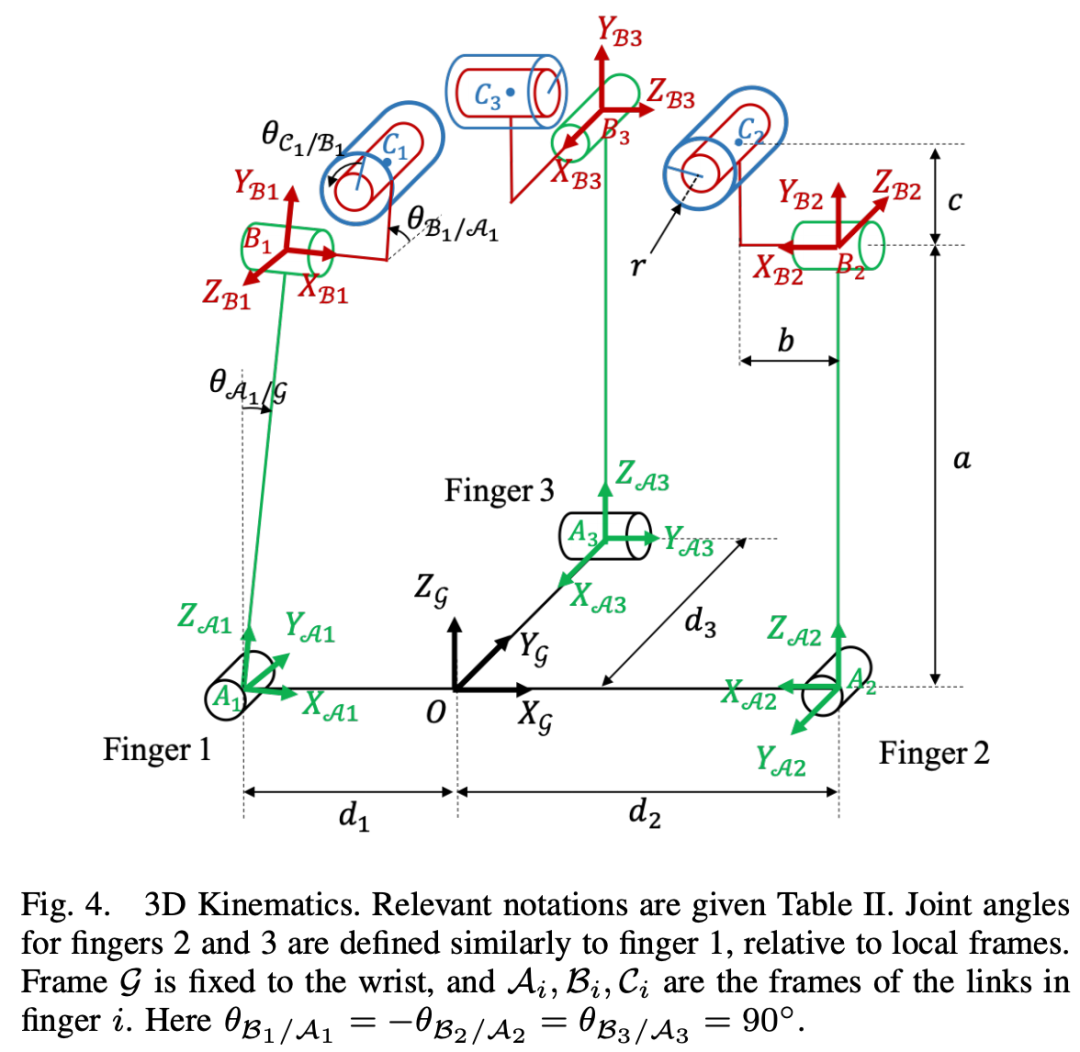
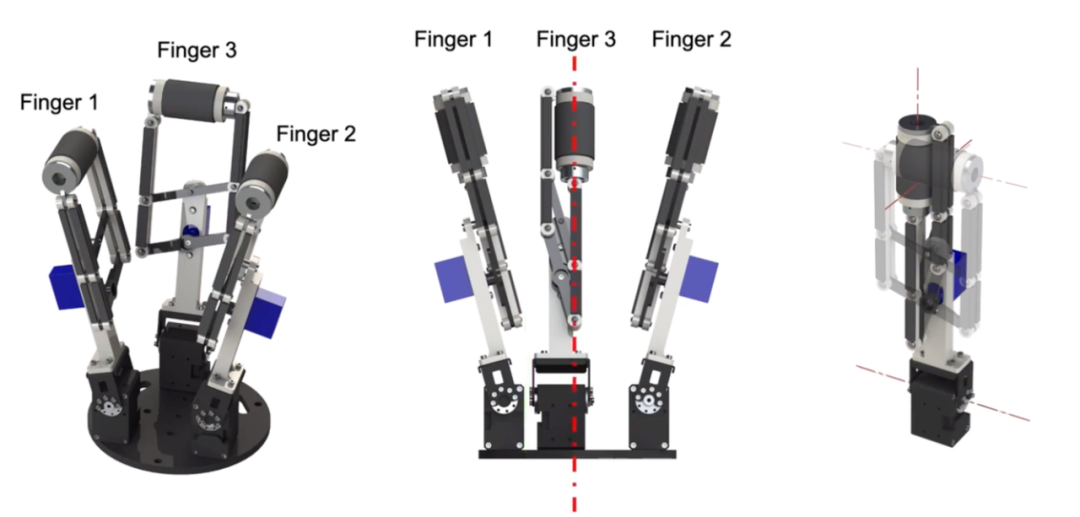
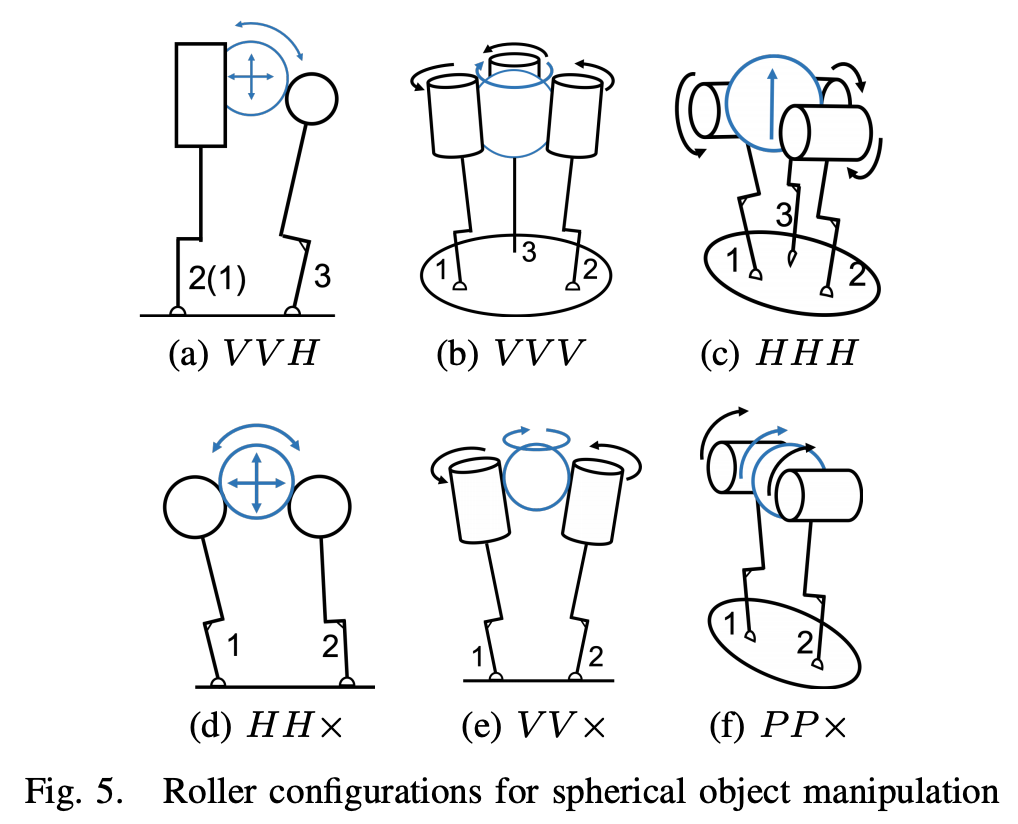
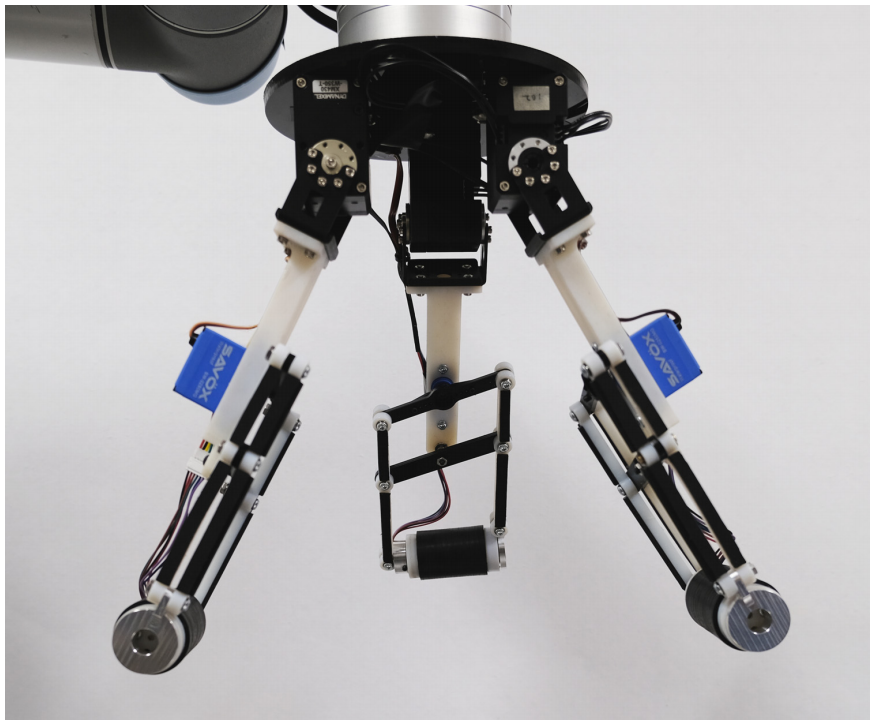
机器人领域顶级会议 ICRA 2020 于近日召开,并公布了会议奖项。其中华人小哥 Shenli Yuan 等的研究《Design of a Roller-Based Dexterous Hand for Object Grasping and Within-Hand Manipulation》获得了此次会议的最佳学生论文奖和最佳机器人控制论文奖。



自动化最佳论文:Securing Industrial Operators with Collaborative Robots: Simulation and Experimental Validation for a Carpentry task
链接:https://hal.inria.fr/hal-02418739v2/document
认知机器人最佳论文:Semantic Linking Maps for Active Visual Object Search
链接:https://7948cefb-1ef7-4c55-96df-fcb8d527c697.filesusr.com/ugd/0886ee_198d7d01f879448bbf00733b21bfcbe9.pdf
机制与设计最佳论文:Swing-Assist for Enhancing Stair Ambulation in a Primarily-Passive Knee Prosthesis
链接:https://icra20.slack.com/?redir=%2Fapp_redirect%3Fchannel%3Dmoa01_1#/
医疗机器人最佳论文:Fault Tolerant Control in Shape-Changing Internal Robots
链接:http://eprints.whiterose.ac.uk/160367/
机器人视觉最佳论文:Graduated Non-Convexity for Robust Spatial Perception: From Non-Minimal Solvers to Global Outlier Rejection
链接:https://arxiv.org/abs/1909.08605
无人机最佳论文:Design and Autonomous Stabilization of a Ballistically Launched Multirotor
链接:https://arxiv.org/abs/1911.10269
人机交互最佳论文:Preference-Based Learning for Exoskeleton Gait Optimization
链接:https://arxiv.org/abs/1909.12316





