【伯克利Pieter Abbeel教授报告@CMU】元学习与深度强化学习的机器人应用,84页ppt
【导读】深度强化学习与元学习是当前研究热点。加州大学UC Berkeley Pieter Abbeel教授最新在卡内基梅隆大学CMU中做了演讲关于深度强化学习在机器人的应用,《Deep Learning to learn》,是了解深度学习在机器人应用研究进展的很好报告。

Pieter Abbeel,加州大学伯克利分校教授、机器人学习实验室主任,伯克利人工智能研究(BAIR)实验室联合主任。Pieter Abbeel是机器人和强化学习领域的大牛。Pieter Abbeel 2008年从斯坦福大学获得博士学位,师从百度前首席科学家 Andrew Ng(吴恩达),毕业后在UC Berkeley任教。Pieter Abbeel还是两家AI公司的创始人,Gradescope和covariant.ai。Gradescope开发为家庭作业、课题研究、试卷等打分的AI系统;covariant.ai开发机器人自动化的AI系统,在制造/仓储/电子商务/物流等领域应用。
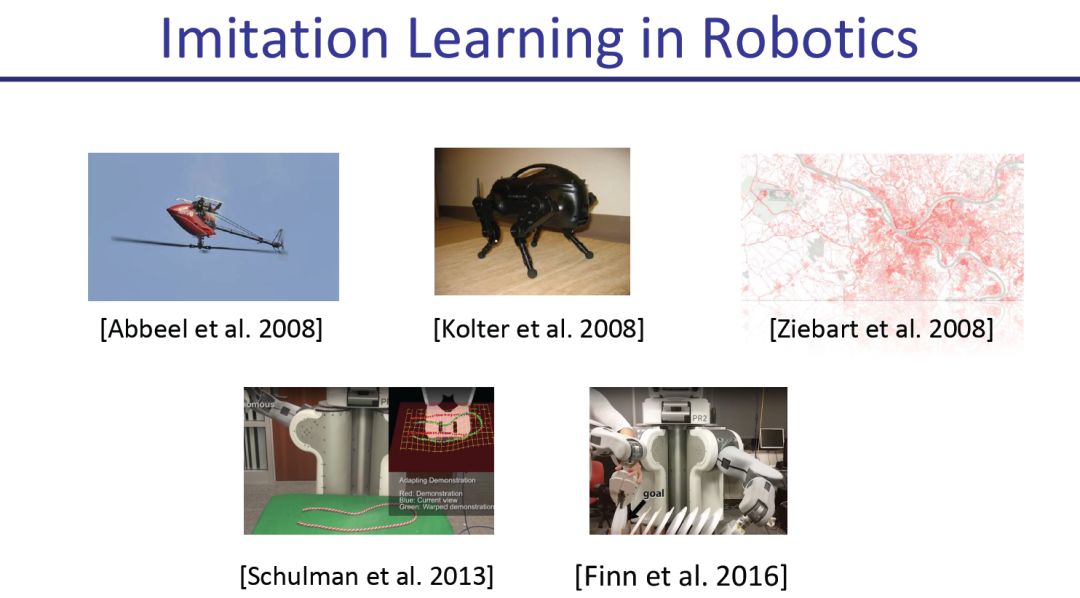
Pieter Abbeel 的研究重点特别集中于如何让机器人向人类学习(学徒学习),如何让机器人通过自己的试错过程学习(强化学习),以及如何通过从learning-to-learn(元学习)过程中加快技能获取。他开发的机器人已经学会了先进的直升机特技飞行、打结、基本装配、叠衣服、移动、以及基于视觉的机器人操作。
Deep Learning to Learn
请关注专知公众号(点击上方蓝色专知关注)
后台回复“DLTR” 就可以获取《Deep Learning to learn》下载链接~
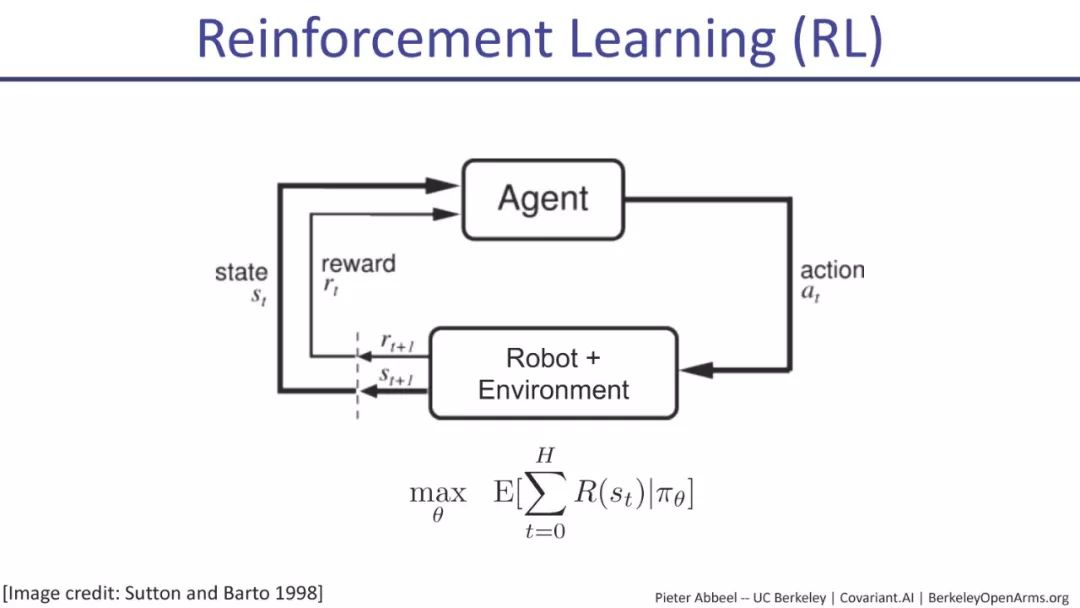
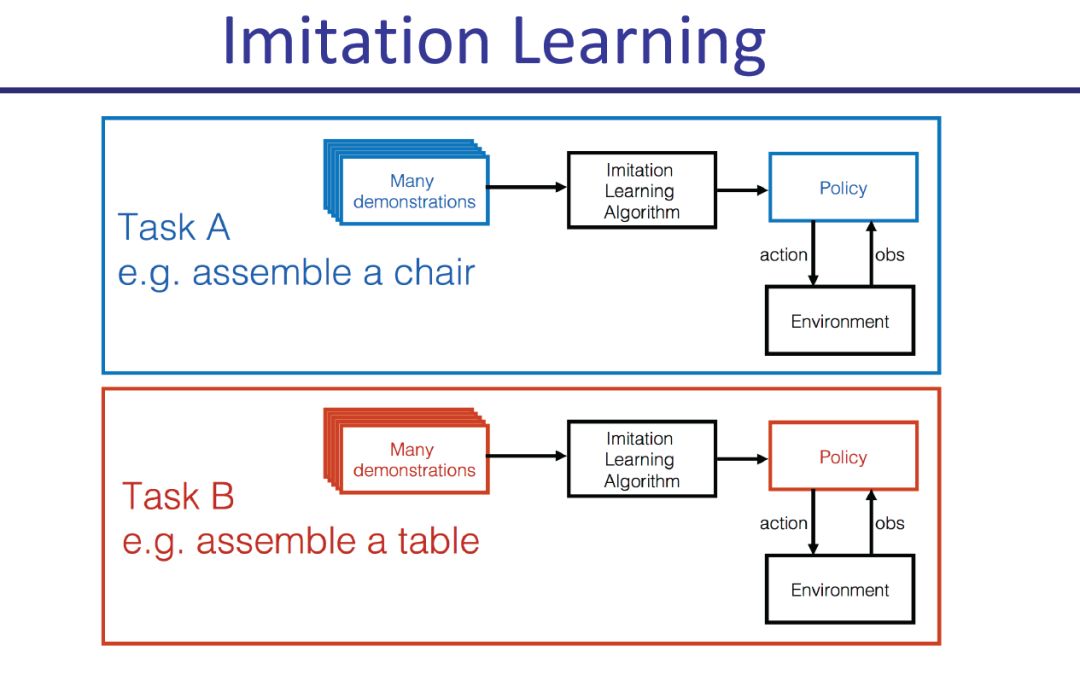
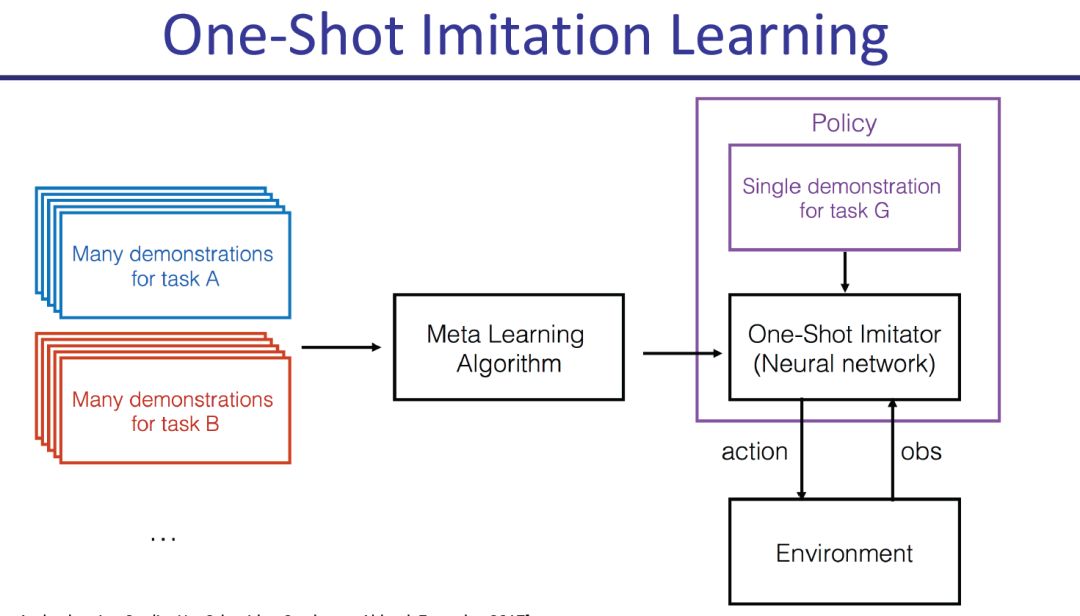
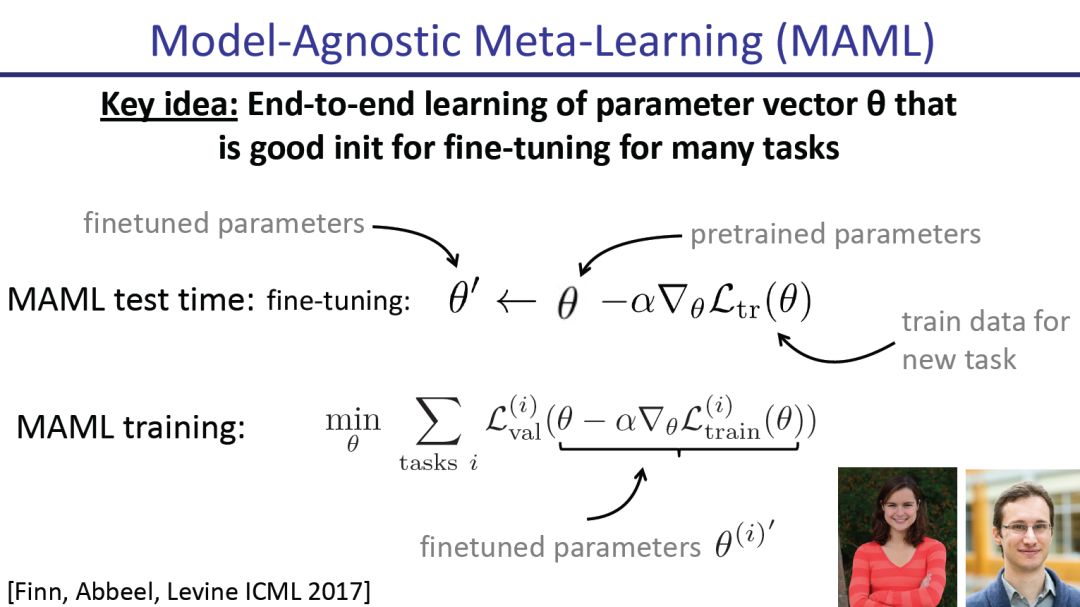
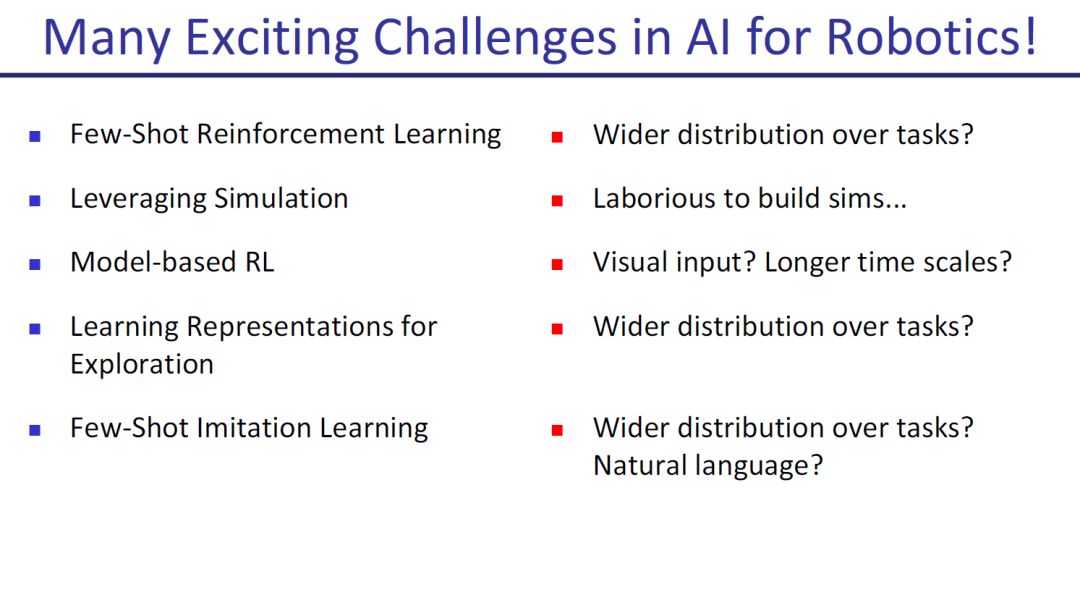
编写机器人程序仍然是出了名的困难。让机器人具备学习的能力,就可以绕过那些通常需要耗费大量时间来完成特定任务的编程工作。这个演讲将描述最近在深度强化学习(机器人通过自己的尝试和错误学习)、学徒学习(机器人通过观察人学习)和元学习(机器人学习学习)方面的进展。这项工作使机器人在操作、移动和飞行方面有了新的能力,这些领域的进步都是基于相同的方法。