自动驾驶系统的皇冠-光电半导体的技术原理和发展趋势|厚势汽车

厚势从最主要的几个国家和代表性公司及产品入手,盘点全球自动驾驶的进展现状,系列文章分为发展现状综述、Waymo 篇、Tesla 篇、激光雷达的应用和构成、激光雷达技术指标、导航和定位等主题文章,本文是第六篇--激光雷达的皇冠--光电半导体,分别从光源、接收探测器和光学系统依次阐述。让我们在成为技术大牛的路上奋勇前进。
一、综述
CMOS 技术发展到了今天,摩尔定律所面临的物理极限已经非常明朗。半导体产业靠提升性能来拉动消费者需求的路线面临巨大的挑战。2015 年以来,自动驾驶的蓬勃发展,大有替代个人电脑、移动通信,成为拉动整个消费者电子产业的终极载体之势。如何在这片蓝海中捞到一桶金?笔者今天来说说自动驾驶系统的皇冠-激光雷达上的明珠:光电半导体。
考虑到读者的耐心,先说结论。
表1 不同激光器对比
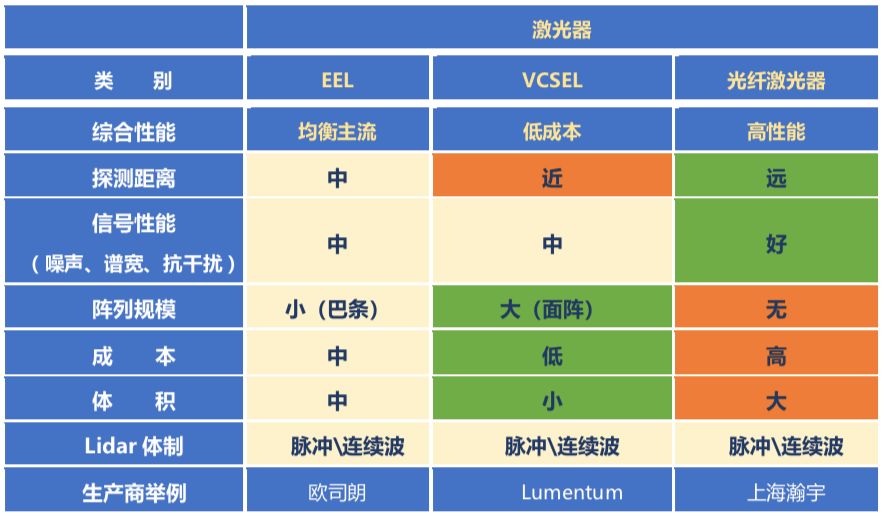
表2 不同感应器对比
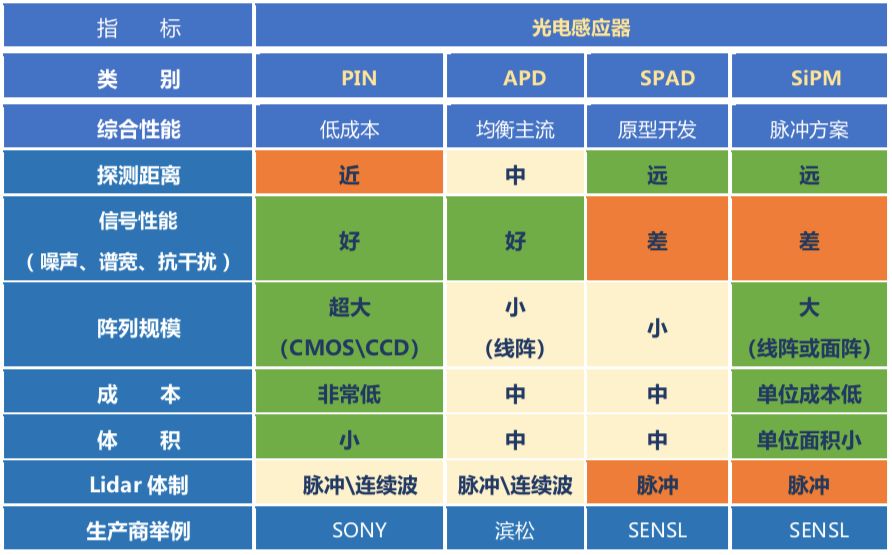
表3 激光雷达对比

二、光源
发射光源有很多中,固体(此处敲黑板-不是固态,说的是红宝石、玻璃、各种石榴石)、气体、半导体(固态)等。固体脉冲功率大,转换效率最低(10%)。气体激光器效率低(20%)、功率低,体积庞大,但是可靠性好、光束质量高。半导体激光器光束质量较差,但是转换效率高(30%-40%),功耗、体积和成本都适合车载应用。如果对光束质量要求高,则可以采用半导体泵浦的光纤激光器(转换效率20%-30%)。
光源部分主要介绍:
1. 激光原理
2. EEL激光器
3. VCSEL激光器
4. 光纤激光器
2.1激光原理
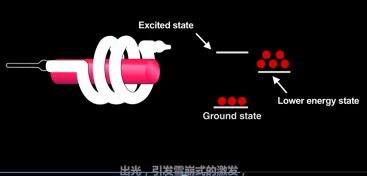
所谓激光,就是激发态的原子(黑色),受到某一外来光子(红色)的作用,而且外来光子的能量恰好满足 hv=E2-E1,原子就有可能从激发态 E2 跃迁至低能态 E1,同时放出一个与外来光子具有完全相同状态的光子(另外一个红色粒子)。这一过程被称为受激辐射。 这就是激光产生的第一条件:受激辐射占主导地位。
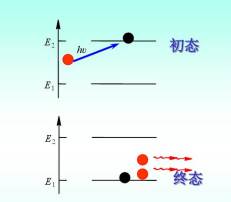
受激辐射
(https://wenku.baidu.com/view/e11dab7ebfd5b9f3f90f76c66137ee06eff94ed4.html)
常温下,高能态上的粒子总少于低能态上的粒子数。这样是没办法产生激光的。只有当高能级的粒子多于低能级时,才能发生雪崩效应,导致大多数粒子发光。这就是激光产生的第二条件:粒子数反转。
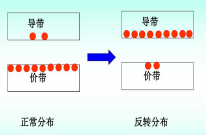
粒子数反转
受激辐射的光是各个方向的,只有当激光的能量聚集于一个方向时,才能产生可以使用的单一波长光源,所以我们需要一个谐振腔。这就是激光产生的第三条件:谐振。半导体激光器的反射镜为两种材料之间的界面。
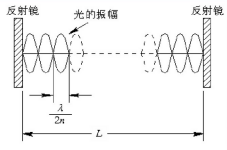
谐振腔
视频3 激光的原理是什么?听听工程师的介绍,或许你就能懂了
半导体激光器,目前主流的产品有 EEL\VCSEL\ 光纤激光器。EEL 为边发光激光器, VCSEL 为面发光激光器。
2.2 EEL边缘发射激光器
EEL 也有许多子型号,笔者有点乱。例如 DFB(distributed feedback laser diodes),FP(Fabry-Perot Edge Emitting Laser),DBR(Distributed Bragg Reflector Laser),双异质结,量子阱。
请看高通如何介绍自己的 LD:The 293B20 is a capped mesa buried hetero-structure (CMBH) grown on n-type substrate with multi-quantum well (MQW)active layers, and distributed-feedback (DFB) grating layer,哎晕晕。
EEL 的光斑是椭圆的,特点是功率高,光电效率是这三种类型中最高的、且照度也高(峰值功率 125W),但是激光的光谱稍宽。
激光器剖面及光斑

EEL激光器实物(SPL DS90A_3)
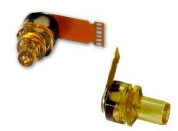
DFB激光器(Finisar Eudyna ELD5401)
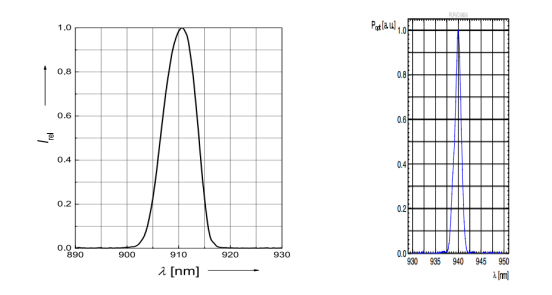
EEL(左)与VCSEL(右)光谱图对比
(https://dammedia.osram.info/media/resource/hires/osram-dam-7209242/SPL%20DS90A_3_EN.pdf)
2.3 VCSEL
VCSEL 称为垂直腔表面发射激光器。VCSEL 从垂直衬底的面发射激光,因此很容易通过平面工艺实现大规模发光阵列;发射激光的束散角较小,光斑近似于圆形;对于光学系统的要求低;工艺与 LED 兼容,有利于大规模制造,降低成本。
VCSEL 主要问题是工艺复杂,且功率低(0.6W,而 EEL 是 125W, 你们喜欢的便宜货)。目前,VCSEL 已经广泛用于光纤通信和 TOF 相机(当年有个家伙,一直在笔者旁边叨叨 TOF 相机,Lidar 与相机,傻傻分不清楚),主要生产厂家有 Finisar,Lumentum。VCSEL 也可以用于近距离的激光雷达。
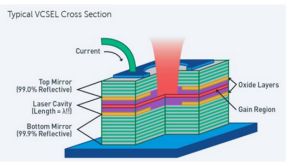
VCSEL激光器剖面图
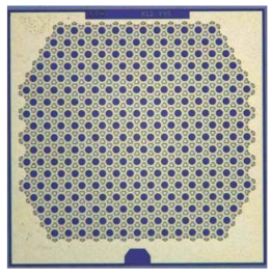
VCSEL激光器阵列(Finisar)
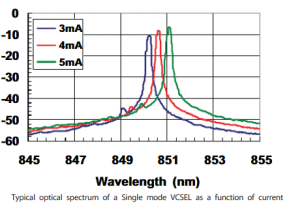
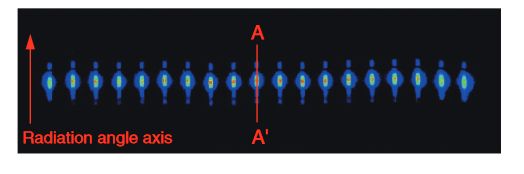
VCSEL 发射光谱图(波长电流可控)
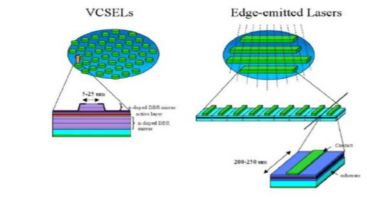
VCSEL与EEL阵列制造方法比较,VCSEL适合制作高密度阵列
2.4 光纤激光器

光纤激光器
光纤激光器与半导体激光器不同的地方主要在谐振腔。半导体激光器使用不同介质的分界面作为反射面,从而形成谐振腔。而光纤激光器直接使用光纤作为谐振腔。
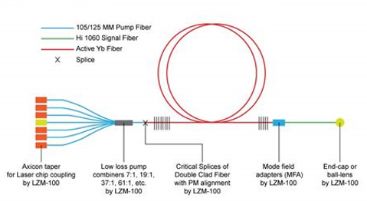
光纤激光器结构
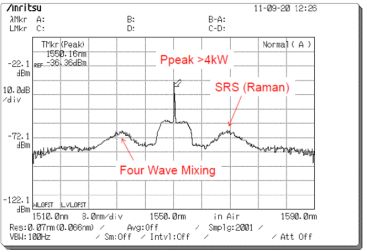
光纤激光器光谱图
如果是 IFMCW(线性调频连续波)体制的 Lidar,对激光器的要求很高:
要求光谱窄,稳定,以降低相位噪声;
要求回波相干性好,便于解调;
要求能够实现线性调频。在这种情况下,一般的脉冲式激光器不能满足要求,而光纤激光器则能满足上述要求。
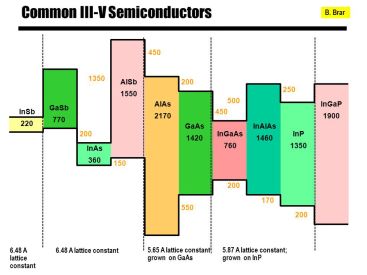
III-V族化合物
2.5 材料
笔者查到的资料,只有一句话:没有硅。III-V 族是横在全固态 Lidar 面前的一座大山。
三、接收探测器
接收探测器有 PIN、APD(雪崩二极管)、SiPM(硅光电倍增管)、SPAD(单光子雪崩二极管)等等。
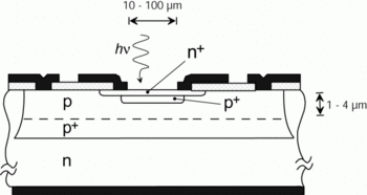
3.1 PIN
PIN,为 P-I-N 结构。I 就是本征半导体。由于没有雪崩效应,其灵敏度较低。接收面积也小,温度稳定性不佳。由于其响应速度很快(可高达 10GHZ),结电容低,一般用于光纤通信,也可用于连续波探测。
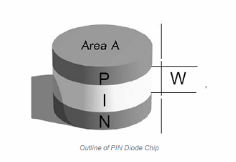
PIN结构
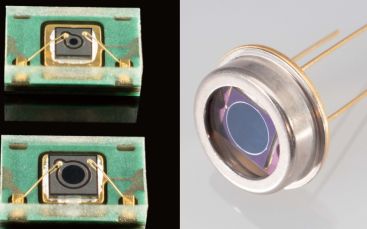
使用PIN管制作的传感器
3.2 APD
早期的机械式激光雷达采用 APD 为主,APD 是可以是硅也可以是 III-V 材料制成。他是一种 p-n 结型的光检测二极管,其中利用了载流子的雪崩倍增效应来放大光电信号以提高检测的灵敏度。主要缺点是偏置电压高,增益一般小于 100,APD 对热和磁都比较敏感。III-V 材料的灵敏度要高于 Si 材料,频段也不同。
滨松APD 二极管
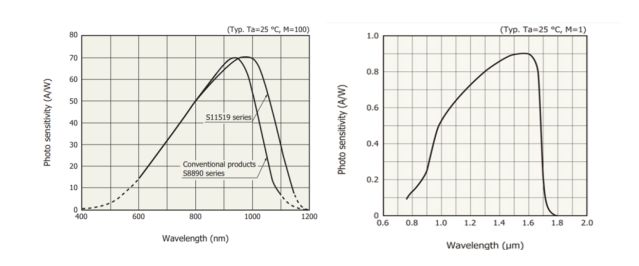
硅APD(感光面积1mm) InGaAs APD(感光面积0.2mm)
(硅的频段、灵敏度和InGaAs都有较大差异)
如下图所示,雪崩二极管工作在线性区。当光子入射时,电子-空穴对分离(光电子效应)。一般的二极管,分离出的电子无法分裂其他电子空穴对。但是雪崩二极管的电子空穴对可以被分离出的电子、空穴继续激发其他电子空穴对,电子、空穴成倍增加,电流不断增大。
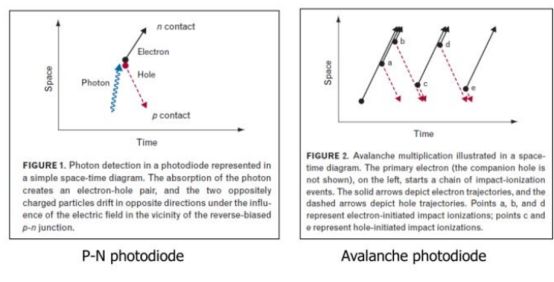
线性区的APD
使用 APD 的激光雷达,由于 APD 是分立元件,所以体积都比较大。像 Velodyne 的 64 和传统的 32E,都使用了 APD。
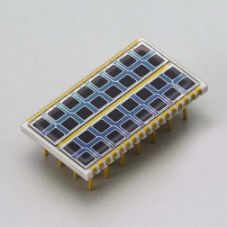
滨松的APD阵列
3.3 SPAD
单光子雪崩二极管探测器,是工作在击穿区的 APD。他的灵敏度很高,一个光子就可以使得二极管激发出大电流(APD 需要 20 个),增益可达 10e6。
Wiki 上SPAD的结构图
所谓击穿区,就是二极管反向直流偏置电压大于击穿电压。此时,一个光子就可是得的的 APD 发生雪崩现象,即一个电子在很短的时间内,一路上打散无数个电子空穴对才被捕获(线性模式下孤电子和孤空穴会很快的被其他空穴、电子捕获),所以电流成指数级增加(而不是成倍增加)。

击穿区的APD
不过高性能的 III-V SPAD 禁运,硅的可以。SPAD 对太阳噪声更加敏感,但是灵敏度高,可以降低 LD 发射功率,减少接收透镜面积,适合夜间和阴雨天线。SPAD 由于在接收一次光子后必须关断,因此不适合连续波。
3.4 SiPM
硅基阵列模式的 SPAD,我们称为 SiPM(SiliconPhotomultiplier)。每平方毫米可以集成 100 到 1000 个二极管。
SiPM 每个二极管上都会串联一个电阻。这个电阻的作用是自偏置(self bias)。当光子激发大电流时,电流通过电阻,二极管偏置电压迅速降低到线性区甚至正偏,防止二极管内的空穴电子对耗尽,延长其寿命。

SiPM阵列
接收管的厂家方面,笔者知道爱尔兰的 SensL(现在属于安森美)和日本的滨松做的很好。
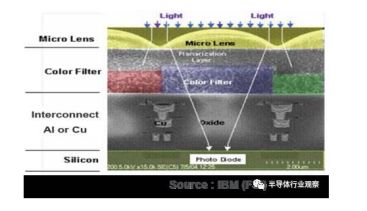
3.5 CMOS and CCD
CMOS 和 CCD 属于照相机使用的传感器技术,就其光电传感器而言,采用了 PIN 或者 PN 结器件。为实现时间飞行法的测量,就需要传感器厂商制作相应的读出电路。例如 SONY 开发出的 CAPD(Current Assisted Photonic Demodulator 电流辅助光子解调器)技术,通过计算反射光的相位来计算飞行时间。

滨松TOF阵列

https://www.sony.net/SonyInfo/News/Press/201706/17-059E/index02.html
四、光学系统
光学系统主要作用包括准直和分光。所谓激光,就是受激辐射产生的光。激光形成的时候,并不是直直的一束,和手电筒产生的光一样,也是发散的。激光发射出来的时候,其发散角度有 8(慢轴)到 30 度(快轴),要通过光学系统将束散角控制到 mrad(0.1°)这个量级,才能有效的聚集能量。对于要求高的激光器,甚至需要通过光纤进行准直。
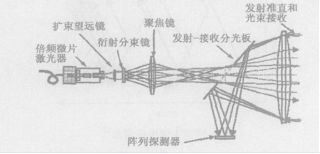
Lidar的光路
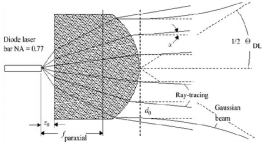
快轴的准直原理
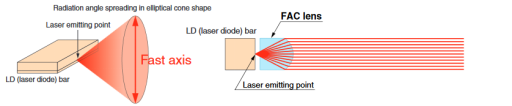
快轴的准直系统(滨松)
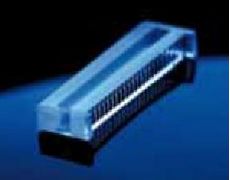
准直系统实物
准直后的光斑形状(滨松)
致谢:本文专业性较强,涉及基本元器件的知识。特别感谢:南航微波光子实验室、上海瀚宇、北京双虹(杜尔润博)、深圳志奋领还有两位匿名专家朋友的大力支持。
作者:斛律哥,厚势专栏作家,资深汽车行业分析师。曾在某超大型汽车集团自动驾驶团队从事对标分析和系统设计多年
编辑:啜小雪
入群:加微信号 autoHS,入厚势汽车科技群与行业专家讨论更多自动驾驶行业信息
-END-
文章精选
---厚势汽车科技周报---
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
sasa@ihoushi.com

点击阅读原文,查看文章「Lyft上市超200亿美金-北京发布自动驾驶报告-戴姆勒收购AV公司-安波福公开AV数据集」





