【泡泡一分钟】基于李群的无损卡尔曼滤波器在视觉里程计上的应用
每天一分钟,带你读遍机器人顶级会议文章
标题:Practical and Efficient Multi-View Matching Eleonora
作者:Eleonora Maset, Federica Arrigoni, Andrea Fusiello
来源:International Conference on Computer Vision (ICCV 2017)
编译:陈世浪
审核:颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

近年来,将视觉信息与惯性测量相结合进行状态估计引起了人们的广泛关注。然而,鲁棒性和效率之间的关系很难平衡,特别是对于低成本的空中飞行器来说,传感器的质量和处理器能力受到尺寸、重量和成本的限制。
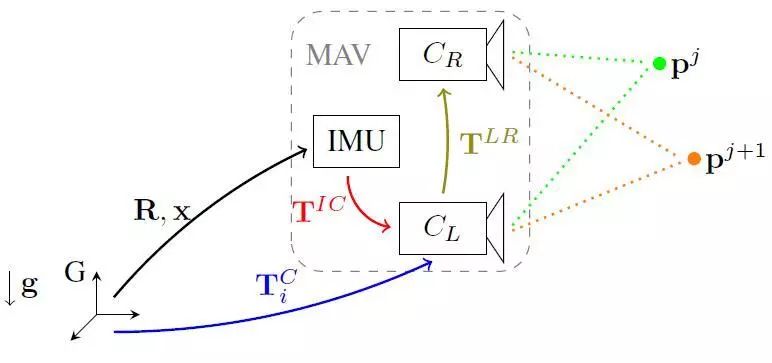
本文中的坐标系
本文提出了一种新惯性-双目视觉测距滤波器,一是提出了最新的立体多态约束卡尔曼滤波器;二是提出了不变滤波理论;三是提出了基于李群的无损卡尔曼滤波。我们的解决方案集成了无损卡尔曼滤波准确性、健壮性和通用性的特点。

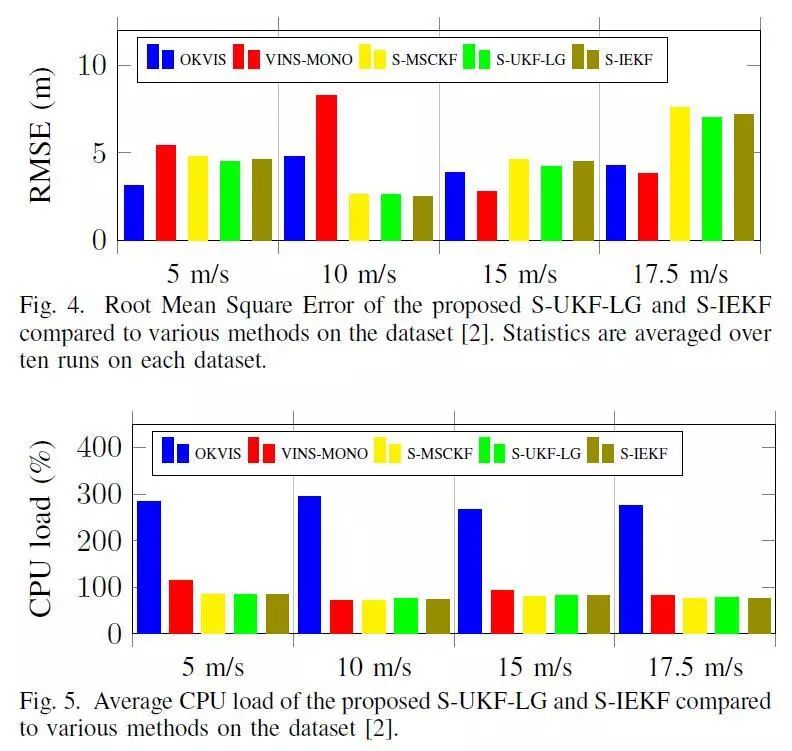
我们与最先进的解决方案在EuRoC数据集和MAV户外数据集在准确性、鲁棒性和计算复杂性方面进行了比较。

Abstract
Fusing visual information with inertial measure ments for state estimation has aroused major interests in recent years. However, combining a robust estimation with computa tional efficiency remains challenging, specifically for low-cost aerial vehicles in which the quality of the sensors and the processor power are constrained by size, weight and cost. In this paper, we present an innovative filter for stereo visual inertial odometry building on: i) the recently introduced stereo multi state constraint Kalman filter; ii) the invariant filtering theory;and ii) the unscented Kalman filter (UKF) on Lie groups. Our solution combines accuracy, robustness and versatility of the UKF. We then compare our approach to state-of-art solutions in terms of accuracy, robustness and computational complexity on the EuRoC dataset and a challenging MAV outdoor dataset.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




