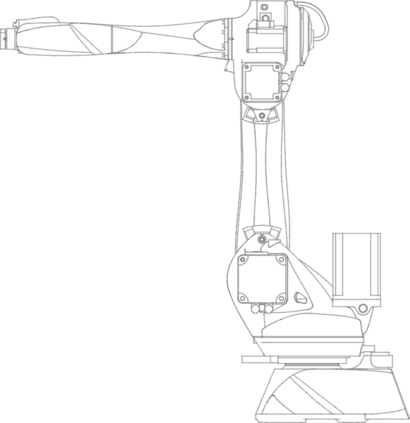
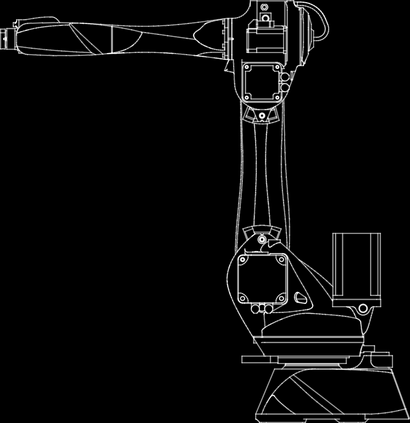
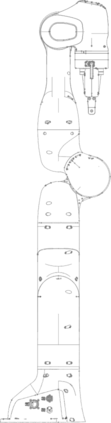
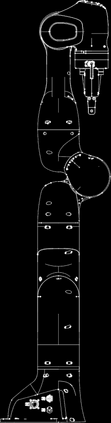
This work proposes a novel singularity avoidance approach for real-time trajectory optimization based on known singular configurations. The focus of this work lies on analyzing kinematically singular configurations for three robots with different kinematic structures, i.e., the Comau Racer 7-1.4, the KUKA LBR iiwa R820, and the Franka Emika Panda, and exploiting these configurations in form of tailored potential functions for singularity avoidance. Monte Carlo simulations of the proposed method and the commonly used manipulability maximization approach are performed for comparison. The numerical results show that the average computing time can be reduced and shorter trajectories in both time and path length are obtained with the proposed approach
翻译:这项工作提出了基于已知单词配置的实时轨迹优化新奇的避免奇特性办法,其重点是分析具有不同运动结构,即Comau Ricer 7-1.4、KUKA LBR iiwa R820、Franka Emika Panda的三种机器人的动态奇特特性配置,并把这些配置利用为避免奇特性而量身定制的潜在功能。