
本文提出LiSWARM系统——一套基于低成本激光雷达的大型无人机群单机探测追踪方案。相较于依赖射频、声学或RGB图像特征的现有先进无人机追踪系统,LiSWARM能在三维空间实现鲁棒精确的无人机定位识别。该系统包含四大核心技术:(1)高效点云数据处理流程;(2)优先级感知聚类算法(从背景噪声中分离集群数据);(3)基于神经网络的可靠无人机识别算法;(4)无人机群单机轨迹追踪技术。我们开发LiSWARM原型机,通过实验室与实地测试验证性能。值得注意的是,在包含150架及500架无人机的两次灯光表演中,系统识别准确率达98%且轨迹追踪稳定可靠。为评估可扩展性,我们对15,000架无人机集群进行系统性能基准测试,结果证实该技术可延伸至战场应用、异常无人机探测、机场监狱等敏感区域安防领域。
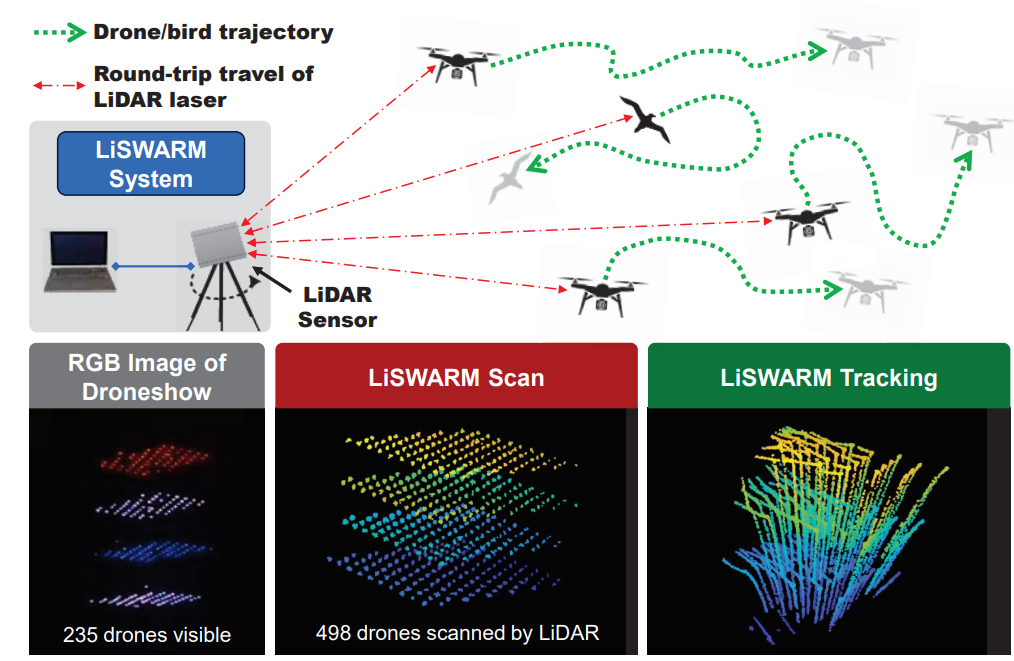
(图1:基于低成本商用激光雷达的无人机群探测追踪技术方案)
成为VIP会员查看完整内容
相关内容

Arxiv
40+阅读 · 2023年4月19日
Arxiv
79+阅读 · 2023年4月4日
Arxiv
143+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
40+阅读 · 2023年4月19日
Arxiv
79+阅读 · 2023年4月4日
Arxiv
143+阅读 · 2023年3月29日