摘要
人类的皮肤有几个传感器,具有不同的特性和对不同刺激的反应,如压力、温度和疼痛。触觉传感器一般是按照生物的皮肤触觉来模拟的;这些传感器能够检测到机械刺激所产生的刺激。压力传感器是最常见的感受器类型,能够操纵外来物体。它们在机器人领域的应用正在迅速发展,主要是受能够与环境互动的自主和智能机器人的前景所驱动。机器人末端执行器、假肢和可穿戴设备都受益于触觉技术的发展。这试图模仿人类皮肤的特性,不仅作为一个保护壳,而且还提供来自外部环境的感官信息。已有许多人尝试用各种技术和材料来制造触觉传感器,导致了各种设备的出现。其中大多数是基于人类皮肤的功能和外观,类似于具有不同程度的灵活性和偶尔的伸展性的小块皮肤,如电子皮肤(Eskin)。
新的制造技术,如增材制造(AM),目前被用来通过逐层沉积的方法开发复杂的结构。由于沉积是由电子器件控制的,因此使用3D打印可以实现复杂的形状。天线、互连和3D打印电路板现在可以用这种技术制造。此外,嵌入机器人部件核心结构中的触觉感应装置也可以制造出来。这有可能生产出新一代的触觉传感器,而没有Eskins中指出的问题。这篇论文介绍了在开发复杂的、智能的设备,特别是机器人末端执行器方面的现状。
本论文提出一种新方法,利用创新设计和多材料增材制造技术开发了复杂的三维(3D)智能结构。它涵盖了目前的3D打印系统,具有类似于过去的挤出机机制和传统的长丝沉积模型(FDM)的能力,形成了具有各种材料的复杂应用的3D打印结构。增强的3D打印机可以打印各种材料,从食品类材料(巧克力、调味品等)到导电材料和电介质。
这种方法被用来生产3D打印手的远端指骨,其上有固有的电容式压力传感器和嵌入式电子装置。探索了诸如热塑性聚氨酯(TPU)、银色涂料、导电聚乳酸复合材料、石墨墨水等材料,以利用3D打印技术开发不同的传感器变体。性能最好的3D打印软电容触摸传感器,由银色涂料和软橡胶(Ecoflex 00-30)形成,被集成在3D打印机器人手的远端指骨上。这些传感器表现出稳定的反应,压力<10千帕时,灵敏度为0.00348/千帕,压力较高时,灵敏度为0.00134/千帕。一个3D打印的手被设计、制造并与传感器集成。该机械手还配备了用于自主操作的采集生成装置。
由于3D打印为复杂的形状提供了设计自由,因此使用单步3D打印方法开发了一种柔软、灵活和低成本的电容式压敏鞋垫。使用弹性材料开发的柔软而坚固的感觉鞋底可以弯曲和扭曲,而不改变其性能。传感器在0-60kPa的范围内表现出2.4/MPa的灵敏度,在60kPa及以上的范围内表现出0.526/MPa的灵敏度,而测试的力高达1000N。
由于电容式传感器的反应/读取速度较慢,因此使用3D打印技术嵌入压阻式传感器,以便对动态条件作出更快的反应。制作的设备使用石墨膏封装在双组分橡胶材料中,并使用3D打印机嵌入TPU中。这些设备在时域和频域上的反应都经过了测试。
虽然上述的重点是装置,但出现了制造上的困难。一个新颖的闭环反馈3D打印机挤出机被开发出来,以扩大3D打印机的能力,并消除当前状态的3D打印机的问题和缺点。该系统扩大了可以打印的材料范围,其优点是可以打印多部分材料,如两部分的聚合物,无需准备。使用各种材料进行了实验,显示在高速打印时有良好的流量控制。
第1章:简介
1.1 动机
智能结构涉及到执行器、传感器和处理单元的分布,能够分析传感器的反应,并使用综合控制方法来触发对变化环境的反应。从汽车工业到植入物,许多应用都受益于智能结构。该领域已经吸引了许多部门的兴趣,因为实施这种设备显示出明显的优势。智能结构可以帮助机器人行业,从导航系统到内部系统状况。然而,机器人系统受到空间的限制,无法将此类系统作为散装部件来实施,因此需要对机器人应用采取不同的方法。
此外,复制生物器官以开发人工等价物并将其置于机器人系统上是一个不断发展的科学领域,有几个挑战尚未完全解决。诸如软体机器人、Eskins、仿生肢体等主题正在吸引人们对下一代机器人发展的极大兴趣,从最先进的机器人技术向智能工厂、辅助生活和安全的人与机器人互动发展。从工业用途转向城市地区(房屋、医院)和非结构化环境(森林、矿井等),关键是要为这些机器人配备人的皮肤能力,以便与人类进行更安全的互动。软性和柔性电子器件通过与机器人身体的刚性和弯曲表面相吻合,取得了不同程度的成功,推动了该领域的进展。
机器人操纵器必须配备传感方式,为实现特定任务提供信息。其他领域,如物联网(IoT)正受益于机器人的发展,能够为终端用户/操作者提供被抓取物体的触觉信息。医生现在能够使用这种系统进行手术[1],它可以提供有关感兴趣的组织的宝贵触觉信息。触觉传感也被用来提取有关材料特性的信息,如柔软度和表面粗糙度,并利用机器学习的进步对材料进行分类[2]-[6]。此外,Eskins被用于人形机器人、假肢和可穿戴应用。然而,目前的技术状况在提供人的皮肤功能方面仍有不足。仅仅通过触摸,人类就能识别被抓物体的属性,如大小、形状、边缘、粗糙度/柔软度、温度、纹理、曲率等等。人类的手从嵌入皮肤不同部位的不同机械感受器中提取大量的信息。电子皮肤无法复制这种复杂程度。此外,一些最常见的问题涉及机械灵活性、敏感性、坚固性、高制造成本、磨损和集成困难。
增材制造,利用逐层沉积的多材料打印智能结构,显示了解决上述大多数挑战的前景。这可以实现电子元件的嵌入,制造有源结构,如传感器和紧凑复杂形状的储能结构。
本论文旨在通过使用多材料打印触觉传感器,解决目前利用AM技术和智能设计的触觉传感器的问题。它能够利用3D打印技术创建传感器,同时传感元件可以嵌入到机器人身体的核心结构中,并利用可用空间,同时它可以嵌入读取传感器状态所需的配套电子元件。这可以为当前技术和包装的空间问题提供一个紧凑的解决方案。随着新材料和沉积方法的发展,这可能会引发新一代的智能紧凑型结构,用于从机器人到食品配件的大量应用。
1.2 目标
目前,有三种主要的途径来开发智能和传感器化设备。第一条是使用Eskin方法开发触觉传感器,这涉及到通常昂贵的工艺和专用设备的制造。第二种是购买现成的传感器,并按原样使用,或使用3D打印或模塑将其封装。最后,第三种方法是在现有的基材上3D打印设备,并使用滴塑等方法对其进行封装。图1.1介绍了目前的方法。
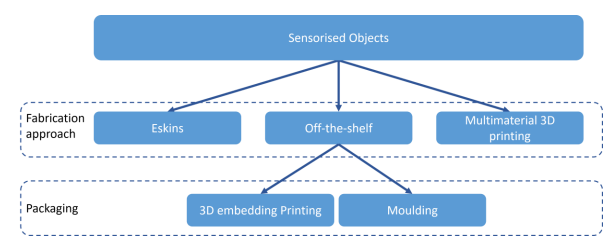
图1.1 感应物体的制造途径
本论文的目标是为机器人应用开发智能和智慧系统。本论文试图弥补智能和传感设备的封装和制造之间的差距。目前开发传感系统的方法是首先开发传感结构,而系统的包装往往被忽视,被推到传感器开发后的状态。在其开发之后,由于在传感结构的最初设计阶段缺乏监督,包装问题极难克服。当这些系统需要为机器人的身体部位(如人形手和脚)执行时,这个问题就被放大了。例如,Eskins存在着磨损、布线和走线,以及电线粘合方面的困难。这篇论文提出了利用AM技术克服这些问题的尝试。该技术的多功能性和快速改进可以为该问题提供一种替代方法。智能设计和多材料打印可以为这个问题提供一个新的解决方案。多个传感器已经被开发出来,使用AM技术进行制造或封装。这提出了一种用于机器人应用的传感器制造的新方法,最大限度地降低了复杂性,削减了制造成本,减少了传感元件的磨损,从而引入了一种具有成本效益的替代方案。
其目标是:
-
1.开发具有先进功能的嵌入式传感器和电子设备的智能设备。这包括机器人/假肢手的触觉传感器,作为使用成本效益高的方法进行物体操作的反馈机制。
-
2.提高Eskins的耐久性。这包括探索可以提高触觉传感器耐久性的材料和电介质、封装策略和制造步骤。
-
3.提高智能设备的自动化程度。这包括开发和修改3D打印机,如果需要的话,用于更专业的用途。为了实现上述目标,可能需要新的硬件/软件,也可能需要开发更复杂的制造技术。
-
4.研究、开发和整合能量收集系统,用于机器人系统的自主操作。为此,已经开发了一个机器人手和手腕,用能量收集太阳能电池板来收集和储存能量,以便自主操作。由于目前的太阳能电池板技术涉及脆弱的材料,保护它们是必要的。
1.3 论文组织
本论文的组织结构如下:
- 文献回顾(第2章)
第2章介绍了物理传感器的最新技术。首先,它提供了在人类皮肤中可以找到的转导机制的基本原理。之后,它介绍了大量的转导机制,并对各种传感器的不同实现方法进行了比较。本章还介绍了用于智能结构和传感器的3D打印。
- 传感器、终端执行器和外围设备的设计(第3章)
第3章介绍了制作传感器和机器人部件的设计过程。这涉及到机器人手和手腕的设计,然后是电容式和压阻式传感器的设计,以及光伏电池的覆盖。该章介绍了使用3D打印工艺的设计自由度。
- 使用3D打印的电子和嵌入式电子(第4章)
第4章涉及用于传感器和机器人部件的电子器件。它介绍了定制的印刷电路板(PCBs)、电子电路的设计以及使用3D打印技术嵌入复杂的智能设备。
- 包装和性能(第5章)
第5章探讨了如何利用3D打印作为制造工具来制造不同的传感器和机器人部件,以及不同传感器和系统的特性。该部分讨论了制作每个传感器所需的每个制造过程,并介绍了它们的性能和所用材料的理由。
- 开发用于自主制造传感器的工具(第6章)
第6章详细介绍了本论文中使用的3D打印机的修改,以提高其能力并提供先进的功能。本节提供了一个定制的挤出机机制的设计,所使用的相关电子元件,以及配套的软件和控制。它介绍了该系统的性能,同时展示了以自主方式使用该系统来制造智能结构的优势。
- 结论和未来展望(第7章)
第7章总结了这项工作在设计和创造智能结构方面的主要成果,以及3D打印机的进展,并对未来的研究提出了一些建议。