近年来,具身智能受到了学术界和产业界的广 泛关注。相比于传统的互联网智能或离身智能从数 据中获取智能,具身智能系统通过控制“本体”与 环境交互,从而获得智能。作为具身智能“本体”的 典型代表之一,操作机器人通过控制机械臂与环境 进行交互完成抓放、搬运等任务,在工业生产中广 泛应用。传统的机器人系统通常由多个不同的模型 组合构成,例如感知模型通过处理传感器数据获取 环境状态和操作对象状态,决策模型则根据当前的 状态确定操作目标。接收到决策目标后,规划模型 根据机械臂与环境状态规划可行路径,最后由控制 模型控制机械臂跟踪该路径以完成任务。这种模块 化的机器人系统可以从各个模块的发展中受益,并 且具有良好的可解释性。但是当操作机器人推广到 日常生活中,基于逻辑编排的决策模块和基于搜索 或优化的规划与控制模块很难应对开放环境下多样 性任务需求以及复杂的交互行为随着大语言模型(Large Language Model, LLM) 和视觉语言模型(Vision Language Model, VLM)的 兴起,以 Transformer[6]结构为核心的基础模型展现 出了强大的泛化能力,机器人技术也迎来了新的发 展机遇。通过大模型强大的视觉理解能力和自然语 言理解能力,机器人在任务规划和开放环境适应性 方面取得了显著进步。例如,机器人可以通过 VLM 识别物体并根据语言指令规划路径,从而在一定程 度上应对环境的多变性和任务的多样性。然而,这 种模式存在语义理解与物理执行的割裂。大模型主 要承担环境理解和规划层功能,无法理解机器人的 执行能力。然而大模型规划的动作需依赖预编程的 下层控制器,导致机器人任务理解与执行出现脱节, 无法实现复杂的动作行为。 相比于传统多模块解耦系统容易受到模块短板 效应的影响,视觉模仿学习通过直接建立视觉图像 与机器人动作之间的映射关系,从而可以实现更灵 活的机器人运动控制。但是早期的方法大部分局限 在特定任务或数据上,往往难以适应新任务或多变 的环境,限制了机器人在复杂场景中的应用潜力。 随着大模型技术的快速发展,LLM 和 VLM 展优秀的语义理解和泛化能力,让实现开放环境下的 通用机器人策略成为可能。视觉-语言-动作(Vision Language Action, VLA)模型通过结合大模型技术, 将视觉感知、语义推理与动作生成深度融合,使机 器人能够直接从多模态输入中预测连续控制指令, 实现从环境理解到物理执行的闭环耦合。目前,以 VLA 为核心的机器人系统在开放指令抓取、柔性物 体操作、双臂协作、以及多机器人协作等领域展现 出令人印象深刻的性能,大大提高了人们对于机器 人任务的想象力。
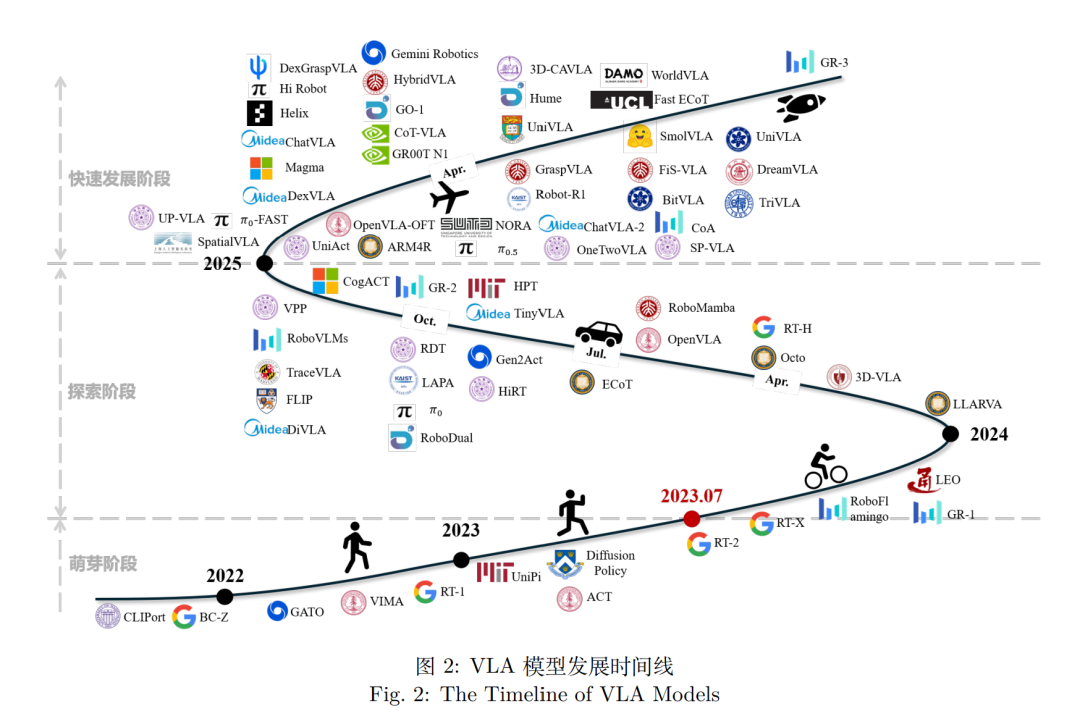
从发展历程看,VLA 的发展很大程度上受到了 大模型发展的启发。白辰甲 等[7] , 王文晟 等[8]详细 分析了大模型在具身智能系统的感知,规划,决策, 数据生成等方面发挥的作用。Ma et al.[1]对 2024 年 之前的 VLA 方法进行了整理,综述内容虽然涵盖 了模型的发展历程、模型结构、数据集、训练方法和 模型评估等多个方面,但是一方面由于 2024 年之后 VLA 技术迭代非常快,技术路线与之前已经呈现显 著的差异性,其所阐述的模型结构、数据和训练方 法已不具备代表性。另一方面,该综述只从仿真器 测评基准的角度阐述了 VLA 模型评估,很难适应当 前的应用需求。Sapkota et al.[2]较为全面地从 VLA 概念、发展历程、模型结构、训练方法和 VLA 应用 等多个角度对 2025 年上半年之前的 VLA 模型提供 了全面综述。Zhong et al.[3]从动作空间的角度分析 了目前 VLA 的发展现状,详细阐述了不同动作空 间下 VLA 的实现方式,局限性和未来趋势。Xiang et al.[4]从人类运动学习的角度,对于 VLA 模型的 后训练方法进行了梳理与分析。Din et al.[5]梳理了 VLA 模型结构和发展历程,并对 VLA 训练数据进 行了详细的阐述,并且通过成功率和零样本泛化能 力对当前 VLA 模型进行了定性评估。与上述工作不 同的是,本文从具身智能系统的角度出发,针对环 境、本体和进化算法三个具身系统的核心要素,从 模型结构、训练所使用的数据集、预训练方法、后训 练方法以及模型评估 5 个方面,审视目前 VLA 的 发展现状,深入剖析 VLA 模型的核心构成,阐述每 个部分在具身操作场景下面临的困境和未来的潜在 发展方向,希望能够为该领域研究人员提供参考和 方向指导。总结来看,本文的贡献如下: • 根据 VLA 发展过程中的特点,本文将 VLA 发 展历程划分成 3 个阶段:萌芽阶段,VLA 概念 尚未形成,但已经出现相似功能的模型;探索 阶段,VLA 模型架构“百花齐放”,但逐渐确 立了以 Transformer 为核心的可扩展骨干结构; 快速发展阶段,模型架构从单层往多层方向发 展,并且随着数据积累,多模态 VLA 模型已经 “崭露头角”。 • 根据数据类型和数据使用方式的不同,本文将 VLA 模型预训练方法划分为 4 种:单一领域数 据预训练、跨域分阶段训练、跨域数据联合训 练以及思维链增强。单一领域数据预训练方法 是当前 VLA 常用预训练方法,但局限性比较明 显,跨域数据联合训练和思维链增强具有较大 的发展潜力。 • 本文将 VLA 模型后训练方法划分为 3 类:监 督微调,目前 VLA 后训练的主要手段,在泛 化性和持续学习能力方面面临挑战;强化微调, 作为一种交互和奖励驱动的主动学习方法,具 备一定的发展潜力,但尚未形成里程碑式工作; 推理扩展,不需要额外的数据训练,但需要消 耗时间换取性能,面临速度与性能折中。 • 本文弥补了当前综述工作中对于 VLA 模型评 估工作的欠缺,从真实环境评估、仿真器评估 和世界模型评估三个方面,全面剖析目前 VLA 模型评估现状与需求的鸿沟。