美国海军的无人作战框架和智能自主系统(IAS)战略解析了美国海军的愿景,即如何通过迭代实验来发展无人平台,重点是发展新的作战概念和实现这些想法的关键技术。美国海军需要制定一个作战概念(CONOPS),将无人水面和水下航行器(USV/UUV)纳入现有情报、监视和侦察(ISR)流程。无人平台(UV)面临着操作和续航方面的挑战,这将使它们在情报周期的处理和开发功能中成为独特的难点。本文讨论仅限于两个具有显著续航能力和收集能力的无人平台,这两项能力使无人平台对作战具有重大影响。这项工作回顾了关于超大型UUV(XLUUV)和中型USV(MUSV)能力和预期任务的非机密文献,并与MQ-4C海神侦察机的发展进行了比较。确定了海军在开发CONOPs时应该考虑的几个因素和解决方案,如何在战役层面将XLUUV和MUSV集成到ISR中。
1 简介
“无人平台在我们未来的舰队中发挥着重要作用。成功地整合无人平台——在海面下、在海面上和海面上空——为我们的指挥官提供了更好的选择,以便在有争议的空间里作战和获胜。它们将扩大我们的情报、监视和侦察优势......”--美国海军作战司令部,2021年航行计划
美国海军目前正在开发一系列无人的空中、水面和水下航行器,以满足其未来部队需求。海军的无人作战框架和智能自主系统(IAS)战略解析了海军的愿景,即如何通过反复实验来开发这些新平台,重点是发展新的作战理念和实现这些理念的关键技术。无人平台将支持海军的目标,即建立一支更加分散的部队,能够在通信退化的环境中作战,同时在受到反介入和区域拒绝威胁的挑战时能够应对。虽然海军的无人平台仍处于不同的发展阶段,但有足够的数据表明它们的能力,可以提出新作战概念,将这些新平台与海军长期以来的优先事项相结合。
美国海军需要制定一个作战概念(CONOPS),将无人水面和水下航行器(USV/UUV)纳入现有情报、监视和侦察(ISR)流程中,无论是在战斗期间还是在日常的非战斗行动中。这种CONOPs将支持智能自主系统中至少两个子类——分布式和持久性传感器,以及战斗空间的扩展、清晰化和精确化。无人平台(UV)虽然有潜在的强大的收集能力,但面临着操作和续航方面的挑战,这将使它们在情报周期的处理和开发功能方面成为独特的麻烦。海军使用无人平台作为ISR资产的概念将需要纳入这些平台独特的适合完成的作战目标,并且应该在这些平台能力正在形成和实战化的时候就开始制定。
为了把重点放在战争的战役层面上,讨论将限于两个具有重要续航能力和收集能力的无人平台,使它们具有实质性的作战影响。这项工作回顾了关于超大型UUV(XLUUV)和中型USV(MUSV)能力和预期任务的非机密文献,并与MQ-4C Triton(一种大型海上无人驾驶飞行器)的发展相比较。它确定了海军在制定将XLUUV和MUSV整合到作战层面的ISR的CONOP时,应该考虑的几个因素和解决方案。分析的重点是在以海洋为中心的战场上使用这些平台,对手是在海面下、水面、空中和太空领域使用军事力量的近邻或同级对手。提到作战指挥官时,设想了一个战区联合部队海上分指挥官(JFMCC)和情报人员,在岸上或海上作战中心(MOC)内运作。
2 背景介绍
美国海军的分布式海上作战(DMO)概念是为了在反介入、区域拒止(A2AD)战场上击败竞争对手,它依赖于分布式、网络化的ISR平台。ISR资产将定位对手并为武器使用平台提供目标支持。无人平台与多域作战(DMO)概念极其相关,因为DMO设想在对手的对峙或反介入武器的交战区域内使用海军资产。海军23财年的长期海军建设计划指出,海军预计在45财年拥有89-145个无人平台,并提到更详细的信息,可在机密的能力发展计划中获得。22财年的建设计划明确指出,海军正在寻求59-89艘USV和18-51艘UUV。海军的资金优先级和迭代式无人平台开发支持CNO将无人平台作为分布式作战的一个重要组成部分。
情报、监视和侦察是三个独立但密切相关的功能,对于军事行动至关重要。广义上讲,情报是收集和分析与决策有关的信息。监视是使用收集资产来监测一个地点的相关活动,而侦察是将收集资产部署到一个确定的区域,以定位或确认没有相关活动。当无人平台用于ISR功能时,将主要作为收集资产来监视或侦察特定区域,寻找相关活动。这些平台的 "无人"性质,使平台本身更具有成本效益,不容易被置于危险之中,但却使其作为ISR资产的有效性变得复杂。采集行动必须以足够严格的方式进行预规划,以满足指挥官在不可能重新分配任务的通信环境中继续生存。此外,收集到的数据必须传送给有能力将信息开发成情报的分析人员,以便为作战决策提供依据。
3 MQ-4C "海神"侦察机
MQ-4C "海神"是由RQ-4 "全球鹰 "改装的大型无人机,用于提供持久的海上ISR。"海神"的开发是为了满足海军对持久性ISR的需求,最终被确定为广域海上监视(BAMS),用于A2AD环境。"海神"在一次任务中可以飞行超过24小时,作战范围为8,200海里。为了满足海军的要求,对RQ-4进行了具体的修改,最明显的是要求在恶劣的海上天气下下降和上升,以便目视识别通过电子信号定位的水面航行器。这一要求需要增加除冰能力、防雷和其他强化措施。

2020年1月,海军对 "海神 "进行了首次早期作战能力(EOC)部署,向关岛的安徒生机场派出了两架飞机。该飞机作为CTF-72的一部分,向在INDO-PACOM责任区作战的联合部队提供海上巡逻和侦察,这是ISR的一个方面。在飞行行动中,"海神 "由四名飞行员组成的机组控制,他们在地面控制点进行操作。这些操作员驾驶飞机,不进行情报开发,情报开发由一个单独的专家小组提供。2020年派往关岛的机体并不具备整套预期的收集能力,只有光电/红外(EO/IR)视频流和一个海上雷达。海军目前正在测试 "海神 "的升级版、多智能改进版,它增加了信号情报收集能力,是打算取代有人驾驶的EP-3E Aeries II飞机的平台。
尽管还没有完全投入使用,但 "海神 "号的早期使用提供了一些经验,应该为大型无人水面和水下船只的发展提供参考。首先,"海神"和其他无人平台所收集的信息将需要传送给人类分析人员进行开发。虽然存在识别感兴趣的信号的自动化程序,但它们还不能将这些信息置于当前友军和敌军行动的背景下,并告知决策者。其次,大型无人驾驶系统依赖于岸上的维持和维护。像 "海神 "一样,任何大型的平台都需要返回基地或港口进行维修、加油和卸载收集的数据。这些岸上的设施是平台操作的关键要求,可能会受到干扰或攻击。第三,在建造无人平台时,应了解任务和有效载荷在未来可能发生变化。为平静的海况和适度的温度而建造的无人平台,在大海里、恶劣的天气或极端的水温下,可能不那么有效或无法操作。
4 “虎鲸”超大型无人潜航器(XLUUV)
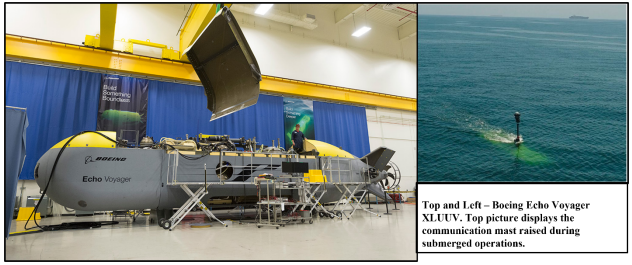
5个“虎鲸”超大型无人潜航器(XLUUV) 中的第一个,在19财年得到资助。其基于波音公司的Echo Voyager XLUUV进行开发,预计在22财年作为一个测试平台,用于开发作战概念和关键的使能技术。XLUUV几乎肯定不会有能力以载人潜艇的保真度来探测、跟踪和分类声音。这主要是因为UUV缺乏训练有素和有经验的船上潜艇人员的专业知识,而且XLUUV是一个比载人潜艇小得多的平台,限制了任何船上声纳阵列的能力。然而,XLUUV的模块化性质扩大了其潜在的收集能力,包括船上携带的任何可部署的系统,以及船体安装或牵引的声纳阵列。下面将讨论基于有机传感器或XLUUV携带的有效载荷进行数据收集。
将XLUUV作为ISR资产使用的最重大挑战是缺乏与地面控制点的频繁通信。现有的能力并没有确定XLUUV是否有能力升起一个通信桅杆或浮标来传输数据和接收修订的指令。这样做会削弱使用水下航行器作为ISR资产的主要优势,即它的隐蔽性。这为作战计划者确定了三种可能的行动方案。第一,XLUUV在其行动期间不能发送或接收任何数据。这将限制XLUUV只执行预先计划的行动,并剥夺行动指挥官重新分配资产的任何能力。第二,XLUUV可以部署一个仅有接收能力的通信天线。这将允许指挥官重新分配XLUUV的任务,但不允许该资产广播接收指令,这使得操作人员不确定新的指导是否正在执行。用来传达这种新指导的广播有可能揭示UUV或潜艇的行动区域。第三,XLUUV可以采用一个同时具有发射和接收能力的通信浮标。这将使指挥官能够发布新的指令,并确认XLUUV已经收到并将执行新的任务,但也有可能将UUV的位置暴露给对手。每种方案都是在安全和作战指挥官的灵活性之间做出的折衷。
继隐身之后,UUV作为ISR资产的第二个主要优势是其收集声学数据的能力。声学情报,即对这些数据的处理和利用,是一门极富挑战性的学科。声学数据需要分析人员花费数年甚至数十年的训练和经验来进行分析。由于这门学科的挑战,海军应该寻求现有的声学情报卓越中心来分析XLUUV收集的数据。海军在弗吉尼亚和华盛顿有两个海军海洋处理设施(NOPFs),由声学和情报专家共同管理。这些设施作为综合海底监视系统(IUSS)的一部分运作,并对来自海上采集资产的声学数据进行持续分析使用。对于ISR功能,海军应考虑将XLUUV作为IUSS资产,并利用NOPFs的常驻声学情报专家来处理和分析收集的数据。
需记录的声学信息通常也会产生大量的数据,覆盖较长的时间段。可能需要几周或几个月的时间来充分开发XLUUV任务的所有记录数据。当考虑到前面讨论的通信挑战时,使用XLUUV作为ISR资产将需要对XLUUV支持的确切行动目标进行详细规划。这种规划应导致对UUV的反应进行预先规划,以满足指挥官意图的具体检测。操作员应考虑三种反应,即立即反应、暂时延迟反应,或决定继续执行任务并在回港后分析数据。
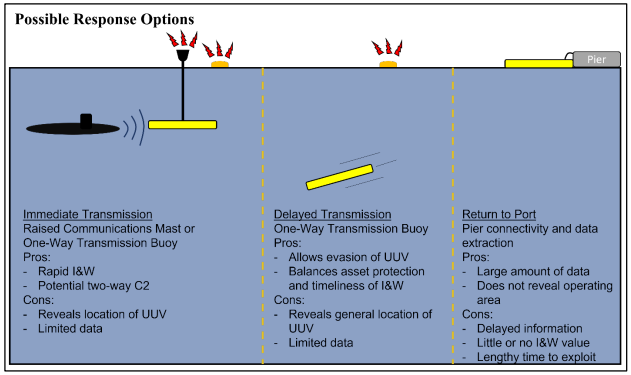
一旦XLUUV检测到特定的标准,例如特定对手潜艇的声学特征,它的反应应该由作战指挥官仔细预先确定。在这种情况下,XLUUV有三种可能的行动。第一,停止其任务,并通过通信桅杆或非系留的单向传输浮标,立即向作战指挥官发出通知,说它已经探测到对手的潜艇。如果敌方潜艇对指挥官的部队构成危险,并且需要时间敏感的定位信息来使反潜战(ASW)资产加入战斗,这种反应可能是适当的。二,XLUUV可以释放一个单向的通信浮标,在延迟后将探测结果广播给作战指挥官。这种折中的反应将为指挥官提供最近的定位数据,并提高他的态势感知,但也允许UUV离开该地区,继续执行其任务而不暴露其位置。如果指挥官希望在近乎冲突的时期提高态势感知,但又不试图主动瞄准对手的潜艇,这种反应可能是合适的。第三,XLUUV可以简单地继续记录声学数据,对探测进行日志记录,并继续执行其任务。日志记录将有助于回港后的开发。这种反应在非冲突时期和XLUUV执行一般监视任务或收集作业环境信息时可能是合适的。这些反应选项中的每一个都利用了当今可用的技术,并为作战指挥官提供了灵活性,以根据作战需要指挥所需的反应。
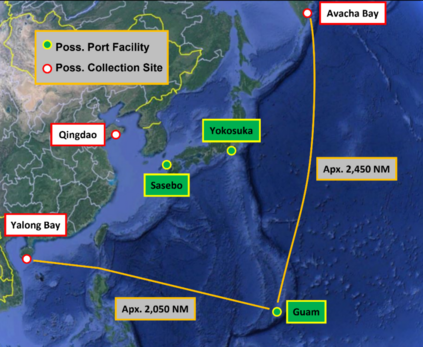
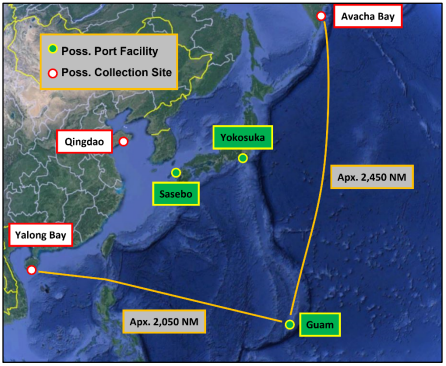
波音公司公开的Echo Voyager XLUUV的数据显示,它的航程为6500海里(NM),最大速度为8.0节,最佳速度为2.5-3.0节。从关岛阿普拉港到俄罗斯太平洋舰队所在地阿瓦查湾约2450海里,到中国南部战区海军驻地亚龙湾约2050海里。如果Orca XLUUV的能力与Echo Voyager的能力相近,这将使最有可能收集情报的地点处于部署在关岛的XLUUV的行动范围之内。然而,在离母港很远的地方使用XLUUV可能会导致在接收和利用收集的数据方面出现重大延误。根据2.5-8.0节的前进速度,从阿瓦查湾返回关岛大约需要13至40天。该平台漫长的旅行时间,加上分析所收集的数据所需的大量时间,促使XLUUV在ISR中最有可能的用途是对作战环境的一般性收集,或有可能实施监视任务,将该平台的长耐久性与前面描述的即时或延迟传输通信方法相结合。
作为一个无人平台,XLUUV在维持和维护方面也将面临独特的挑战,这将影响其作为ISR资产的使用。XLUUV被设想为一种可部署或远征的能力。对这种能力的讨论似乎仅限于单个或少量的船体,然而DMO概念和海军造船计划设想了几十个平台,所有这些平台都将需要运输、地面支持和码头空间来运作。任何降低或拒绝完成任务的物质缺陷都需要长时间返回港口或可能返回位于对手威胁范围之外的水面舰艇。维护和保养的现实需要被纳入任何利用无人武器作为ISR资产的作战计划中,这可能导致它们主要被用于非战斗性的情报准备任务,在这些任务中,故障的影响比战斗行动中要小。
5 中型无人水面舰艇(MUSV)
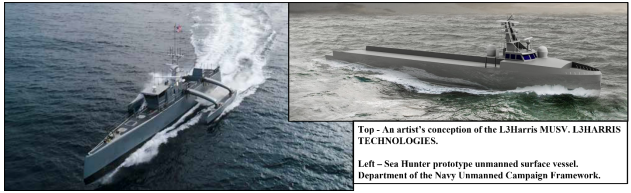
美国海军的MUSV目前正在基于最初的原型平台Sea Hunter(SH1)和Seahawk(SH2)的基础上进行开发。MUSV的具体目的是发挥ISR的作用,提供一个集成到海军战术网格中的无人传感器和电子战平台。MUSV计划目前在平台能力方面的定义不如XLUUV,但其发展足以考虑具体的ISR功能和作战概念。将MUSV作为ISR资产使用的关键决定是确定它们是作为独立的收集器还是作为从属于有人驾驶的水面舰艇的资产。
无论是哪种使用方式,MUSV都将以类似的方式发挥作用--收集现有的电子数据,进行初步的开发和处理,并将收集的结果转发给岸上和海上的分析人员和系统。区别在于船上的收集系统在寻找什么信号,以及向谁和如何转发收集的信息。当MUSV作为载人舰艇的支持力量运行时,它的收集系统应集中于探测和跟踪来袭的威胁,并为被支持的舰艇提供目标定位的帮助。传感器包应能同时识别和跟踪反舰巡航导弹、弹道导弹、高超音速导弹、水面舰艇、有人和小型无人驾驶飞机,并提供潜望镜探测能力。MUSV应该能够将其收集的结果直接提供给被支持的舰艇,而不依靠干预的地面站或卫星,然后协助选择和确定防御措施或反击的目标。
如果作为一个独立的收集器运行,MUSV最好配备能够超越基线追踪多个空中和地面目标的传感器,并自动将这些追踪与已知或可疑的对手平台联系起来。这些数据应该被转发给作战指挥官,以建立共同作战图(COP)。这两项任务,直接支持载人舰艇或提供COP发展的独立行动,包含了监视和侦察任务的要素。然而,最佳的传感器和通信能力在不同的任务之间是不同的,这需要在进一步发展MUSV时予以考虑。
作为主要的电子情报(ELINT)收集器,MUSV将需要依靠现有的ELINT分析员来分析所收集的数据。海军水面舰艇上一般都有可以进行这种分析的密码学人员,尽管他们目前的任务是操作和利用其舰艇的有机收集能力。如果MUSV上有足够的通信能力,那么收集到的数据可以被发送到岸上的分析人员进行利用。在这种情况下,海军信息战指挥部(NIOCs)是数据利用的合理地点。将需要开发基础设施和信息技术,以便将MUSV收集的ELINT纳入现有的处理系统。此外,水面舰艇和岸上设施的密码人员配置将需要反映出增加了一个新的收集平台,提供多个需要分析的数据流。
6 反论点
像“虎鲸”和MUSV这样的大型无人平台被设想为未来技术的一个组成部分,它将实现海军的DMO概念。这一设想声称,从无人平台收集的数据将通过海军战术网格和联合全域指挥与控制(JADC2)网络传达给作战级指挥官。CNO的NAVPLAN 2021指出,建立一个强大的海军作战架构(NOA),这将支持将无人平台收集的数据纳入JADC2,是仅次于调整海上战略威慑力量的第二大发展重点。目前的ISR平台开发正在将重点从人力密集型部队转向自动化能力,以在有争议的环境中击败同行的对手。AI/ML的使用将导致收集的数据处理和利用的速度呈指数级增长,大大增强作战指挥官的态势感知,并减少从检测到对手到使用武器的时间。对收集到的数据进行网络化、自动化的利用,将是分布式作战的一个重要推动因素。
7 辩证
网络化通信和AI/ML的发展必然会导致无人平台的有效使用,这有三个原因。第一,作战艺术取决于对作战环境、敌方和友方部队以及作战目标的深入分析和理解。无论提供何种工具,这种理解和部队的有效使用将始终取决于一个有能力的作战指挥官。作为一种ISR资产,无人平台将依赖于指挥官和情报人员的明确行动任务。第二,目前人工智能/ML工具在情报分析中的状态是有希望的,但离开始复制人类分析的能力可能还有很长的路要走。人工智能/ML工具只能复制人类思维和行动所形成的模式,而且几乎可以肯定的是,无论开发何种算法,都会错过与作战艺术相关的新趋势和异常数据。海军在培训和保留AI/ML专业知识方面也面临挑战。第三,大型UV目前正处于迭代实验阶段,在设计平台能力的同时,现在就需要制定作战概念。等到无人平台达到最终的生产状态,再为这些新的收集资产制定ISR CONOPs,将使海军情报专家无法在开发过程中告知满足作战意图所需的传感器和能力。
8 结论
美国海军情报界需要充分投资于大型无人平台的发展,特别是发展将这些平台用于ISR角色所需的能力和概念。海军在将无人平台纳入ISR过程中的经验将为利用无人水面和海底舰艇提供参考,但不能直接转化为利用无人平台。在通信恶化或被拒绝的环境中运行的无人平台可能需要大量的岸边基础设施来处理和利用收集的数据,对这种基础设施和人力的投资应该与平台的开发同时进行。从无人平台收集的数据可能需要大量的时间来处理和利用,减少了它们在指示和警告(I&W)任务中的作用,并可能引导最佳传感器套件来支持作战环境的收集。由于在处理和利用收集的数据方面的挑战,无人平台不会取代现有的载人飞机、水面和水下航行器以及国家高空收集的ISR功能,但如果开发和使用正确的能力和作战概念组合,无人平台可能会成为发展指挥官态势感知的有力工具。