
超视距空战(BVR)作为现代空战的核心形态,依赖先进雷达、导弹系统与决策支持技术。本文系统综述仿真与机器学习(ML)工具在BVR空战分析中的应用,涵盖方法论、实践场景与技术挑战。研究聚焦机器学习如何赋能自适应战术以提升行为识别与威胁评估能力,从而增强态势感知效能。本文追溯BVR空战的历史演进,解析探测、导弹发射与战后评估等关键交战阶段,重点探讨仿真环境在构建实战化空战场景、支撑飞行员训练及验证AI驱动决策策略中的作用。通过对比前沿仿真工具的多智能体协同与实时适应性研究能力,分析其优势与局限。本综述的核心贡献包括:阐述机器学习在BVR空战中的具体应用、评估仿真工具效能、识别研究缺口并指明未来方向,为传统仿真方法与人工智能在动态对抗环境中融合构建先进人机决策体系提供全景式解析。

超视距空战(BVR)作为现代空战的核心要素,其典型特征为飞行员目视范围外的远程交战。该作战模式高度依赖先进雷达系统、远程导弹与探测跟踪技术,旨在实现目视接触前摧毁敌方目标。随着空战形态演进,BVR交战重要性日益凸显,需创新性方案应对远程对抗挑战。BVR的战略价值在于其能赋予兵力先发制人能力并维持战术优势,但其复杂性要求跨学科技术整合——包括传感器融合、目标跟踪、决策算法与导弹制导系统——以提升交战效能、确保任务成功并增强飞行员态势感知(SA)。
视距内空战(WVR)发生于较短距离,常依赖机动性、速度与瞄准精度进行近距格斗。相比之下,BVR通过先进传感器与远程导弹压制对手。尽管存在差异,BVR可能随战机逼近转为WVR交战,因此需兼备两种域作战能力。
本文全面综述BVR空战前沿方法与技术,聚焦最新进展与战略路径。首先追溯BVR历史沿革,从早期空对空导弹(AAM)系统演进至现代多传感器平台,解析关键技术突破及其对战法的影响。其次剖析BVR交战核心阶段(探测、导弹发射、支援与规避机动),阐释本文所述方法如何提升作战效能。随后评述关键方法论,包括动态环境自适应决策的机器学习(ML)算法与人工智能(AI)在交战及自主战术中的作用,其应用涵盖飞行员决策支持系统至无人机(UAV)作战。最后强调仿真工具在战术开发、飞行员训练与算法验证中的价值,讨论通用与专用平台在复杂作战场景建模中的适用性。
据所知,此为首次针对BVR空战中仿真与ML应用的专题综述。现有空战综述多泛化论述或将BVR作为次要议题。多数远程交战ML研究仅见于论文相关章节,缺乏方法论与应用的系统整合。本文突破既往研究局限,跨多领域文献提供ML与仿真增强决策与交战策略的全景视角,分析现有仿真工具能力边界及适用场景,识别未解挑战与研究缺口,为未来研究指明方向。
本综述核心贡献包括:系统梳理BVR中ML方法体系及其在自主战术决策中的作用;对比仿真工具在实战化场景建模中的能力与局限;揭示ML与仿真技术融合提升战术决策的瓶颈问题;展望研究趋势,提出开放性问题并规划领域发展路径。
超视距空战研究的多维应用
BVR空战研究涵盖自主决策、多智能体协同与飞行员训练等多元领域。本节分类梳理近期进展,聚焦新兴技术与方法如何提升战术效能、适应性与任务成果。
A. 自主决策
自主决策涉及分析、选择与执行可增强态势控制与作战效能的行动。研究提出多种方法支撑该能力,重点探索智能体如何建模战术行为、执行目标推理(GR)并在复杂场景中辅助或替代人类飞行员。
文献[61]提出基于粒计算的战术特征降维方法;文献[15][52]在计算机生成兵力(CGF)与GR框架下研究行为建模,使自主系统能在动态场景中作出适应性战术决策。此类能力支持开发可分担威胁应对或支援机动等任务的自主空战智能体,与人类飞行员形成互补。文献[48]开发了生成战术对抗策略的飞行员辅助系统。
文献[49]提出遗传规划(GP)框架以发掘空战场景中的新型行为模式,赋能更具适应性与不可预测性的战术;文献[50][51]利用文法演化生成自适应CGF与人类行为模型(HBM),提升训练仿真的真实性与适应性。
文献[12]解析无人机空战决策流程,将其划分为态势评估、攻击规划、目标分配与机动决策四阶段;文献[2]基于飞行员知识构建分层框架,将空战拆解为多个子决策系统。
文献[17]综述深度强化学习(DRL)在BVR空战中的应用;文献[57]在高保真空战仿真环境中探索新战术的自主学习;文献[53]开发基于DRL的智能体,通过自博弈模拟战斗机战术并生成新型空战策略,使人类飞行员可与AI训练体交互以提升决策与适应性;文献[58]构建强化学习(RL)环境以实现空战战术自主学习与机动创新。
多篇研究将RL应用于一对一空战场景。例如,文献[54]提出自博弈训练框架以解决长时域交战中的动作控制问题;文献[55]设计基于DRL的决策算法,通过定制化状态-动作空间与自适应奖励函数实现多场景鲁棒性;文献[59]通过改进Q网络使智能体能从优势位置接近对手以优化机动决策;文献[56]提出基于真实武器仿真的DRL智能体构建方法;文献[60]开发混合自博弈DRL智能体,可维持对不同对手的高胜率并提升适应性与性能。
B. 行为识别
行为识别对理解与预测敌方行动、支撑决策与战略规划至关重要。多项研究探索了复杂不确定作战条件下识别与预测敌方行为的方法。
文献[62]提出集成规划与识别算法,证明主动观测收集可加速行为分类;基于案例推理(CBR)框架,文献[63][64][65]开发案例驱动行为识别(CBBR)系统,通过时空特征标注智能体行为,提升GR控制无人机的识别能力;文献[66]结合对手建模与CBR识别敌方编队行为。
针对数据不完整问题,文献[70]提出基于多粒度粗糙集(MGRS)的意图识别方法;文献[68]将Dempster-Shafer理论与深度时序网络融合以优化分类效能;文献[71]采用决策树与门控循环单元(GRU)实现一对一空战状态预测;文献[1]提出基于级联支持向量机(CSVM)与累积特征的分层方法进行多维度目标分类。
为识别战术意图,文献[69]开发注意力增强型群体优化与双向GRU模型(A-TSO-PBiGRU)检测态势变化;文献[67]应用动态贝叶斯网络(DBN)推断飞行状态与战术动作的因果关系,提升编队识别与态势感知能力。
C. 制导与拦截
制导与拦截机制对提升导弹命中率(尤其针对高速机动目标)具有关键作用。
文献[72]通过对比制导策略,识别可最小化拦截时间与机动负载的配置方案,优化不同作战条件下的交战选项;文献[73]通过增强导弹特定攻角命中能力改进高超音速目标拦截效能,优化终段交战条件;文献[74]在无人作战飞行器(UCAV)中采用自主制导技术提升瞄准精度,实现对机动空目标的有效打击。
文献[75]优化导弹飞行中的机动决策以支撑交战规划并提升模拟作战成功率;文献[76]通过动态攻击区(DAZ)概率建模实现实时航迹修正,确保环境不确定性下的打击精度;文献[77]通过协同制导模型提升雷达与导弹协同效能,增强防空体系整体精度。
文献[78]量化数据链质量对导弹效能的仿真影响,揭示更新延迟与误差对导引头激活及整体成功率的作用机制;文献[79]改进双脉冲发动机导弹点火控制与弹道修正技术,强化远程目标拦截能力。
D. 机动规划
机动规划旨在计算运动基元序列以获取战术优势。
该领域早期研究侧重结构化评估与决策模型。文献[80]提出包含态势评估模型、机动决策模型与一对一对抗评估模型的框架;文献[81]基于环境条件、威胁分布、武器性能与空战规则开发战术决策系统;文献[82]整合战术站位与武器能力的多维度要素,探索提升资源分配效能的目标分配(TA)策略。
近期研究聚焦学习驱动方法。文献[83][84][85]应用深度强化学习(DRL)进行机动规划,增强动态场景下的威胁规避与目标打击能力,通过多初始交战条件训练提升智能体适应性;文献[86]采用双延迟深度确定性策略梯度(TD3)算法开发一对一对抗中的自主导弹规避策略;文献[87]基于敌我相对方位与距离设计机动决策方法;文献[88]结合DRL与蒙特卡洛树搜索(MCTS),探索无需先验飞行员知识或价值函数的机动规划路径。
E. 导弹交战
导弹攻防需优化发射时机与机动策略以最大化攻击效能与生存概率。
进攻方面:文献[38]采用监督学习(SL)估算最优导弹发射时机以提升任务效能;文献[89]提出雷达盲区机动控制方法实现隐蔽接敌;文献[92]通过分析导弹捕获区与最小规避距离,确定编队空战协同场景下的最佳发射距离与防御策略。
防御方面:文献[90]为无人作战飞行器(UCAV)设计基于分层多目标进化算法(EA)的自主规避机动策略以提升生存能力;文献[91]将导弹规避问题建模为双团队零和微分博弈,其中一架战机需在远离来袭导弹的同时逼近非攻击性目标。
协同作战领域:文献[93]提出基于武器有效区(WEZ)的协同占位方法;文献[94]解决空对空导弹(AAM)发射后信息盲区难题。
F. 多智能体协同
多智能体协同作战通过自主平台间的协作决策、联合战术执行与响应优化,赋能协同攻击策略、动态编队重构及人机协同等应用场景。
文献[95]将多无人机战术策略应用于空对空对抗分解,将复杂交战拆解为一对一单元案例以提升机动效率与作战成功率;文献[96]将协同站位分配与目标分配(TA)建模为零和博弈,采用混合双Oracle算法与邻域搜索在时限约束下优化解质量。
文献[97]扩展战术战斗管理器功能,构建分布式系统检测跨智能体任务数据差异以强化协同效能;文献[98]通过面向角色的框架推进目标推理(GR)技术,增强通信受限自主智能体的协同能力;文献[99]提出AlphaMosaic架构,将人类反馈整合至作战管理系统(BMS),实现动态任务中基于信任的人机协作。
文献[100]将群体智能适配固定翼无人作战飞行器(UCAV),实现编队飞行、自主重组与战损后动态调整等行为;文献[101]采用集中式AI规划系统协调全态势可观测与可验证的多智能体任务方案;文献[102]通过兵棋推演验证舰队协同行为,优化战术参数以提升均势对抗任务成效。
文献[42]利用仿真评估优化无人机战术编队应对不确定敌方行为;文献[103]提出两阶段协同追击策略,结合诱敌战术与混合A*路径规划提升拦截成功率;文献[104]设计多目标函数与GDT-SOS元启发式驱动的自适应制导方法优化无人机占位效能。
文献[3]通过分层强化学习架构使多智能体团队通过自博弈与场景分解学习高低阶战术;文献[105]将多智能体近端策略优化(PPO)应用于UCAV协同,将领域知识融入奖励函数以提升性能;文献[106]构建基于图神经网络的推理模型,结合专家知识建模复杂协作模式并简化大规模交战决策。
文献[107]采用对抗自博弈与分层策略梯度算法学习超越专家基线的涌现策略;文献[108]在集群机动中应用深度确定性策略梯度,联合学习智能体协作与目标打击;文献[109]融合神经网络与人工势场技术,支持针对自适应对手的协同路径规划。
G. 作战分析
作战分析(OA)通过仿真、模型与评估指标衡量作战效能、支撑战术规划并支持作战决策。
文献[11][40]应用随机博弈模型分析不确定性下的多机对抗,解析超视距(BVR)场景中的协同策略与导弹分配;文献[46][110][111]通过含人类操作员的仿真评估实战条件下飞行员与团队表现,聚焦作战规程遵循度、认知负荷与共享态势感知(SA)。
多项研究构建了面向训练、战术测试与作战规划的仿真平台:文献[8]开发战术级空战仿真系统以支持智能决策;文献[112]设计用于评估巴西空军军事场景的ASA框架;其云端扩展版ASA-SimaaS实现可扩展自主仿真服务[113];AsaPy工具集通过统计与机器学习(ML)方法提供仿真后分析功能[114]。
文献[115]采用体系(SoS)仿真评估飞机设计、平台互操作性及生存性、武器使用等任务级效能指标;参数化研究探究雷达截面积、导弹射程、飞行高度与通信延迟等变量对杀伤概率与整体作战效能等指标的影响[116][120][121];文献[117]通过基于智能体的模型探索行为特征对仿真可信度的影响,增强对称与非对称BVR场景的验证方法。
文献[118]设计双模通信协议以适配协同空战网络条件;文献[119]强调仿真架构的可扩展性与灵活性,提出需构建能管理AI驱动实体与分布式决策流程的多智能体系统;文献[122]开发高动态飞行条件验证环境,评估大机动动作下光电系统性能。
文献[123]建模网络中心战分析传感器、指控系统与火控协同水平对作战效能的影响;文献[124][125][126]分别基于多准则决策(MCDM)、相关向量机与改进极限学习机(ELM)模型提出决策支持工具,为战机性能与战术配置提供量化评估。
H. 飞行员训练
飞行员训练通过先进仿真环境、绩效评估与自适应学习技术提升战备水平与作战效能,旨在强化复杂空战场景中的决策与态势感知(SA)能力。
文献[127]提出的回顾性绩效评估方法为识别改进领域、指导针对性训练调整提供洞见;文献[130]探索行为建模技术以优化高压条件下飞行员决策,增强训练演习真实度。
文献[131]探讨的实况、虚拟与构造(LVC)环境集成方案,通过融合真实与仿真要素构建高拟真沉浸式训练场景,使飞行员体验多样化作战情境以提升环境适应性;文献[129]提出绩效加权系统优化训练成效,确保飞行员高效达成能力基准。
文献[18]综述自适应训练方法学,强调基于飞行员表现的AI驱动个性化内容生成技术进展;文献[10][128]探讨空战行为快速适配与训练仿真验证方法,确保仿真系统精准映射真实作战动态,通过提升响应速度与态势理解能力提供直接影响训练效能的实用工具。
I. 态势感知
态势感知(SA)是理解战术环境(涵盖敌我位置、行动与意图)的核心能力,支撑交战、占位与规避的明智决策,最终提升作战效能与生存概率。
文献[132]探索实时数据处理方法,赋能飞行员高效解析复杂信息;文献[133]将SA扩展至团队层级,验证协同数据共享对任务连贯性与绩效的增益。
威胁评估方面:文献[137][152]解析敌方武器有效区(WEZ)判定方法,为飞行员提供战略规避或对抗的空间感知;文献[141]开发的实时威胁分析工具持续更新态势数据,确保战术动态调整;文献[134][139][135]整合目标意图预测至威胁评估体系,构建战场态势分析与威胁指数系统。
AI驱动SA方法:文献[138][143]应用机器学习(ML)进行威胁检测,加速飞行员威胁预判与响应;文献[136]采用基于蒙特卡罗的概率评估方法优化不确定态势下的风险管理;文献[47]提出基于防御性制空(DCA)作战指标的接战决策支持工具;文献[140]分析深度神经网络(DNN)在WEZ最大射程估算中的应用。
文献[142]利用机载传感器数据与神经网络实时评估击落概率;文献[6]提出对抗条件下机动灵活性估算方法,支撑编队级决策。
J. 目标分配
目标分配(TA)涉及高效配置空对空导弹、防空导弹及战机等资源以压制敌方威胁,需在优化交战效能的同时最小化资源消耗。
多篇研究聚焦提升作战效能的分配方法:文献[146][147][149]探讨动态分配导弹与战机至多目标的多目标分配(MTA)策略;文献[148]提出多友机对多敌机的协同攻击分配方法。
文献[144][150]研究基于任务目标与约束的武器-威胁最优配对算法,以最大化杀伤概率并保存资源;文献[145]引入融合目标优先级与交战时序的改进分配模型;文献[151]探索结合优化技术与实时战术调整的混合方法以应对动态战场。
仿真工具
仿真环境与工具对推进超视距(BVR)空战研究至关重要,其能够建模复杂场景、评估决策算法并优化作战策略。此类工具涵盖通用平台至定制化系统,各具独特功能以应对BVR空战的不同维度。
多数平台通过高层体系结构(HLA)与分布式交互仿真(DIS)等标准支持互操作性,促进跨仿真系统集成与实时同步。本节概述BVR空战研究中常用工具,文末附表格总结核心工具特性、编程语言与互操作能力。
A. AFSIM:仿真、集成与建模高级框架
美国空军研究实验室开发的AFSIM[153]是BVR空战研究中的主流平台,支持灵活建模作战环境、系统集成与任务规划决策流程,常用于认知控制、行为识别与人工智能研究[15][62][63][64][65][66][97][99][101]。AFSIM支持与其他模型集成,实现战略与战术层级的实时交互仿真,赋能作战管理与任务规划研究。该平台非开源,受美国政府法规管控。
B. ASA:空天仿真环境
巴西空军开发的ASA(葡萄牙语Ambiente de Simulação Aeroespacial缩写)[112][113]是基于C++的面向对象仿真框架,专用于复杂空天行动建模,支撑态势感知(SA)、任务规划与作战决策研究[38][42][47][53][114][117][140]。ASA支持机器学习技术与传统仿真融合,优化战术并预测敌方行为,其架构可精细建模任务参数、航空器系统与武器性能。该平台非公开,受巴西政府法规管控。
C. 定制系统
定制系统采用Python、C++或MATLAB开发,专用于商用工具无法满足的研究场景。由于电子战模型、导弹制导与BVR技术多涉密,商用系统难以满足开放性研究对复杂性、安全性与适应性的需求,故定制系统成为主流解决方案[8][11][40][55][56][59][61][67][68][70][72][73][74][76][77][79][81][82][83][84][88][89][92][93][94][95][96][98][103][104][105][108][110][111][116][118][122][123][124][125][126][135][137][139][142][145][147][148][149][151]。此类工具支持快速开发,适用于敏感领域研究。
D. DCS World:数字战斗模拟器世界
DCS World[154]是商业化高保真战斗飞行模拟器,以真实飞行动力学与精细模型著称,广泛应用于决策制定与强化学习(RL)作战研究[54][86]。其开放式架构支持自定义模块开发,赋能研究者模拟动态高烈度BVR空战场景,成为真实作战条件下测试AI驱动智能体的理想平台。
E. FLAMES:灵活分析与建模效能系统
FLAMES[155]是模块化商业仿真框架,支持开发与运行实况-虚拟-构造(LVC)仿真,具备实时可视化、场景管理与作战分析(OA)功能,适用于任务规划与作战模拟[38]。尽管灵活性高,但其商业许可可能限制可访问性,且复杂架构对快速原型开发或资源受限研究构成挑战。
F. FLSC:瑞典空军战斗模拟中心
瑞典国防研究局开发的FLSC整合LVC仿真分析空战场景,用于飞行员训练、任务规划、决策支持研究及人机协作评估[130][131]。其功能特性可增强联合作战中的态势感知(SA)与决策能力。FLSC由瑞典国防研究院(FOI)运营,访问受限,但国防项目研究者可通过合作渠道申请使用。
G. JSBSim
JSBSim[156]是开源飞行动力学模型,广泛应用于需高精度航空器仿真的强化学习BVR研究,支持决策制定、机动优化与作战接战等任务[3][6][58][60][138][143]。常与Unity(IAGSim)及定制环境集成,构建计算高效的动态场景自主决策仿真。
H. MATLAB与Simulink
MATLAB[157]与Simulink[158]广泛用于仿真、控制理论与优化研究。MATLAB数学能力支撑决策与作战研究[1][50][51][69][75][78][80][90][91][102][109][120][121][141][146][150];Simulink通过图形化动态系统建模工具扩展功能,适用于控制策略开发。
I. Python与R
Python是开发仿真环境与机器学习(ML)模型的核心工具,借助TensorFlow[159]、PyTorch[160]等库支持任务规划、强化学习实施与优化[71][85][100][136],其灵活性赋能快速原型开发及跨平台集成研究。R语言偶尔用于空战数据分析与仿真相关统计建模[140]。
J. 其他工具
以下工具亦支持超视距(BVR)空战研究:
ACE-2:定制化仿真器,用于测试空战机动中的遗传优化技术[49]。
ACEM:实况-虚拟-构造(LVC)仿真环境,用于空战中人类表现分析[46]。
FTD (F/A-18C):F/A-18C飞行训练设备,用于高保真模拟飞行员行为、协同与训练场景[127][129][133]。
IAGSim (Unity + JSBSim):结合JSBSim飞行动力学与Unity实时渲染的定制仿真器,专为自主空战研究设计[2]。
MACE[161]:现代空战环境(MACE),可扩展分布式仿真平台,用于作战分析(OA)与战术空战场景测试[115]。
NLR四机编队模拟器:荷兰航空航天中心(NLR)开发的仿真器,用于多机对抗中的飞行员训练与人机交互研究[128]。
STAGE:快速生成空战场景的框架,适用于人工智能(AI)与强化学习(RL)训练[10]。
Super Decisions:集成层次分析法(AHP)与网络分析法(ANP)的决策支持软件,用于空战威胁排序与任务规划[134]。
UnBBayes-MEBN:基于多实体贝叶斯网络(MEBN)的概率推理框架,应用于不确定条件下的态势感知与决策[132]。
WESS:自适应战术决策仿真工具,用于动态作战行为建模[50][51]。
Wukong:强化学习(RL)驱动的多智能体战术决策平台,专为BVR场景设计[57][106][107]。
X-Plane[162]:高保真商业飞行模拟器,用于自主行为验证与作战规划[48]。
K. 工具总览
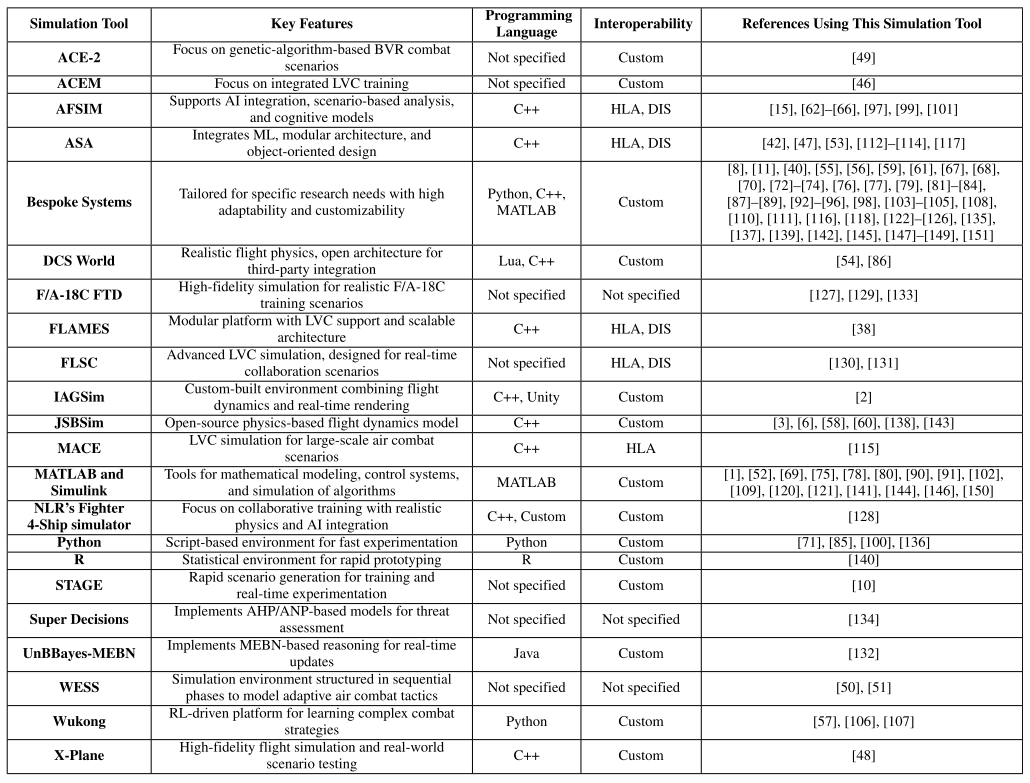
表2汇总了核心工具、主要应用场景、功能特性、编程语言及互操作能力。该表涵盖本文分析的120项研究中的116项,其余4项为未使用具体工具的综述类研究。各列信息如下:
• 仿真工具:工具或框架名称
• 核心功能:与BVR空战研究相关的主要特性
• 编程语言:开发或定制化使用的主要语言/平台
• 互操作性:支持标准仿真协议(如HLA、DIS)、定制接口或无相关信息
• 引用文献:使用该工具的研究编号
开放挑战与未来趋势
尽管强化学习(RL)等先进技术在空战决策领域取得显著进展,仍存在诸多开放挑战,为未来研究提供机遇。
-
场景复杂性
当前方法(如NFSP RL与DQR驱动的DRL)多基于简化的一对一对抗验证[54][84]。需将其扩展至反映真实空战复杂性的多智能体环境。基于DDPG的集群策略与H3E分层方法等框架为应对此挑战指明方向[2][108]。此外,目标分配(TA)、探测与制导研究多假设雷达、战机及通信节点同质化[118][144][148][149][163][164][165],未来需探索异质化模型以更精准刻画现实系统复杂性。 -
全观测假设局限
MCTS、PPO与CSVM等方法常假设环境全观测,忽略雷达目标搜索等关键要素[1][88][166]。BVR场景中KAERS等技术通过处理部分可观测性提升模型鲁棒性与实战适用性,具备借鉴价值[57]。 -
计算强度制约
MCTS等方法虽有效但计算耗时[88],需优化连续动作空间处理并提升计算效率以适配实时应用。基于TD3算法优化导弹攻防决策的近期研究展现进展[86]。 -
初始条件敏感性
课程学习与IQN方法在不利初始配置下表现欠佳[59][167]。基于GP的演化行为树(BT)等自适应学习率与鲁棒课程设计可缓解敏感性并增强泛化能力[49]。 -
可扩展性与实时适应性
多智能体方法(如MAPPO)与分层框架(如H3E)在动态大规模环境中面临可扩展性挑战[2][105]。需开发高效方法应对协同场景,如目标分配研究所示[96][146]。 -
不确定性整合不足
博弈论、贝叶斯网络(BN)与监督学习(SL)等方法多假设确定性环境[1][76],融入随机要素与不确定性可提升模型对复杂空战的现实刻画能力。 -
多样化场景验证缺失
SAE网络战术认知模型与DRL集群模型多在静态环境验证[108][141],需扩展至动态高维场景(如实时决策与多变作战条件)。基于ANN与粒计算的协同空战研究为此提供范例[61][151]。 -
跨学科融合需求
强化学习(RL)、深度学习(DL)与控制理论结合可显著增强BVR决策模型。分层RL与行为树(BT)等技术为协调高层战术与底层机动提供可扩展框架[48][61],此类方法有望催生更鲁棒、可解释的模型。 -
训练效率优化
遗传规划(GP)虽在策略优化中潜力显著,但低维问题处理与计算开销仍存挑战。课程式RL与敌方意图识别技术可提升学习效率与决策能力[54]。 -
实战化应用瓶颈
先进方法需通过高保真仿真验证实战适用性。与军事及航空机构合作可弥合研究与部署鸿沟,集群策略与协同无人作战飞行器(UCAV)研究已体现仿真验证价值[105][108]。 -
仿真工具未来趋势
随着BVR场景复杂度攀升,仿真工具需沿以下方向演进:
• 高保真多智能体仿真:在AFSIM、ASA、DCS World与FLSC等平台支持大规模集群协同与实时高保真仿真。
• 增强互操作性:通过HLA与DIS标准实现有人机、无人机及导弹等异构系统仿真集成。
• AI/ML深度整合:嵌入自适应智能体实现实时任务规划与决策[105]。
• 计算效能提升:优化仿真架构以应对复杂度增长,支撑实时动态适配。
突破上述挑战将推动开发复杂、可扩展且自适应的BVR决策模型,为高动态对抗空战环境中的自主系统奠定基础。

