嫦娥五号总设计师杨孟飞:潜心追梦,向月高飞


人类首次登月———美国阿姆斯特朗登上月球
1969年,阿姆斯特朗搭乘“阿波罗11号”(Apollo 11)宇宙飞船登月成功,让美国成为了世界上第一个在月球上实现载人航天的国家。之后的探月方面,美国和其他国家再没有宇航员登陆到月球表面。而去年12月11日,美国总统特朗普签署了“1号太空政策指令”,宣布美国宇航员将重要返月球。很快新华网又有消息传来:美国宇航局决定2020年起建设月球永久基地,计划用5到7年把人类再次送上月球,还会开采月球能源。
航天科技代表一个国家的科技实力。同样,在2018年两会期间,我国院士杨孟飞和多位政协委员联名提交了有关探月工程的提案:呼吁中国尽快启动实施探月四期工程,持续推进我国月球探测由“跟跑、并跑”向“领跑”的转变,抢占航天科技战略制高点。

中国科学院技术科学部院士 杨孟飞
杨孟飞,是中国科学院技术科学部院士,我国空间技术领域专家,现任“嫦娥五号”探月工程三期探测器系统总指挥和总设计师。他多年来一直从事空间飞行器领域科研工作,在空间飞行器高速再入返回、甚高精度姿态控制以及高可靠控制计算机等方面取得了系统的创造性成果,为探月工程、载人航天和卫星研制做出了重大的贡献。
长在湘江边,算珠开启了他的人生
杨孟飞1962年10月出生在湖南省湘阴县,湘江边长大的孩子从小就汲取了山水灵气。父亲是村里的会计,家里长年父亲拨拉算盘珠的声音不绝于耳,这也把他“熏陶”成了一个打算盘的高手。以至于后面填报大学专业的时候,尽管他不了解“计算机”行业,想到敲击键盘和拨算盘珠异曲同工,就毫不犹豫地选择了计算机专业。1982年他考上了西北电讯工程学院(现为西安电子科技大学),之后又考上了中国空间技术研究院北京控制工程研究所的空间计算机应用专业的硕士研究生。从小迷恋“计算”的杨孟飞,从此开始广泛阅读计算机专业相关的书籍,从未谋面的DonaldE.Knuth(DonaldE.Knuth,出生于1938年,是算法和程序设计技术的先驱者,1974年获图灵奖,被誉为“人工智能之父”),也成了他青年时的偶像。
7年里(从本科到研究生总共7年时间)对计算机专业书籍的广泛阅读,以及对专业知识的痴迷与刻苦钻研,为他之后从事的航天科研工作打下了扎实的基础。读研期间,凭借深厚的专业技术功底,他在卫星姿态和轨道控制计算机研制方面的才能很快显现了出来。1985年硕士毕业后,他被留在了中国空间技术研究院北京控制工程研究所工作。
在历练中成长,成果层出不穷
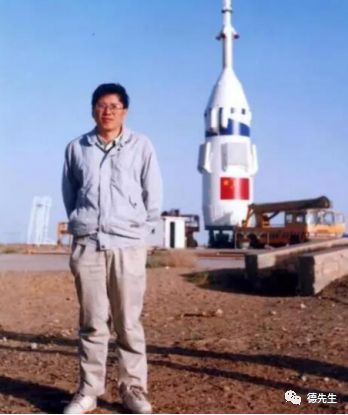
年轻时 执行任务的杨孟飞
杨孟飞第一次到发射场执行任务,是1992年夏天,去甘肃酒泉卫星发射场为长征二号丁火箭的发射工作做前期准备。此时他已工作了七年,期间因成绩斐然被破格擢升成了“小高工”。他在我国新一代返回式卫星控制系统上设计的“三机冗余TMR/S可变结构高可靠控制计算机容错方案”,将会在这次卫星发射中得到检验。这个方案已经过了大量分析、计算,又通过了原理样机的实验。作为一名卫星研制领域的“新兵”,他却对自己的方案信心十足。
1992年8月9日,长征二号丁火箭首次发射,成功将我国第13颗返回式遥感卫星顺利送入预定轨道。这也证实了他的“采用软硬件结合手段实现的三机可变结构的容错系统”,具有瞬时故障处理和恢复能力,以及方案先进、稳定性强等特点。也因此,他和他的同事们一起获得了一个部级科技进步一等奖。

1999年11月20号,神舟一号飞船发射成功
接下来1999年7月“神舟一号”飞船发射前的准备工作,就不再轻松了,使他真正体会到了航天科研工作者的紧张与焦灼。
神舟一号飞船上应用的许多新技术,一些多年从事卫星研发工作的人员也从未接触过,制导导航控制技术就是其中之一。行内人都知道,“卫星难,难在控制”,飞船亦是如此。飞船研制八大分系统中,制导导航与控制被称为是技术难度最高、最关键的分系统之一,直接决定着飞船试验任务的成败。杨孟飞和他的同事们此行目的,正是要确保神舟号试验飞船制导导航与控制系统的正常运转,使飞船按指令在太空飞翔并按要求返回地面。这样艰巨的任务,让他感受到了肩上的担子压力很大。
飞船上的控制计算机,是空间飞行器控制系统的核心。如何确保其在空间辐照、温度、振动等恶劣环境且不可维修情况下可靠稳定地运行,一直是国际航天界的难题。神舟一号飞船运入发射场时,控制软件还处在不甚稳定的状态,需要工作人员一边参加飞行试验合练,一边进行调试,一边继续编程。离飞船发射的日子越来越近,软件程序固定版本却迟迟未出,杨孟飞和他的同事们都感到了难以言喻的危机感。
为提高飞船控制系统的“保险系数”,达到高可靠、高安全性要求,杨孟飞早在飞船研制初期,就大胆提出了采用计算机三机容错技术:一台机器出现问题,可以自动转换到另一台机器,三台机器互为备份,兼具自检功能。这种方法可靠性更高,计算速度更快。他提出的软件表决硬件仲裁的三模冗余容错方法,实现了我国空间首台强实时高可靠三模冗余/单模变结构控制计算机容错系统结构。他提出的“三机热备份加一机冷备份的混成容错”方法,也满足了我国神舟飞船双故障情况下可靠安全运行的需求。
执行任务的4个月里,每天都是同样的工作,白天他和专家们一起分析故障原因,晚上伏在计算机前排除故障。两只手总是不停地在键盘上敲击、修改、计算.....一遍又一遍,直到出现满意的结果。休息,成了一件非常奢侈的事。
这一年11月20日,神州一号飞船实现了成功发射,举国上下无不振奋,杨孟飞高度紧张的神经,终于在21小时后返回舱安全返回地面后松弛了下来。这时他才意识到任务完成了,自己4个月的紧张工作没有白费。
神舟一号发射成功,引起了世界各国的广泛关注,让中国的航天实力又向前迈进了一大步。这次重大任务的圆满完成,也为他之后参与神舟三号飞船制导导航控制系统的研制,打下了契机。
2000年,杨孟飞在神舟三号飞船制导导航控制系统的研制过程中,为解决实时性以及计算量大的问题,又一次发挥了他非同一般的聪明才智。他提出的采用前后台处理机任务分组、并行流水线工作的计算机结构,进一步提高了系统的安全性与可靠性,使系统的主要技术指标达到或超过了国外同类产品水平,为2002年“神舟三号”的发射成功又立新功。
为我国探月工程多次解决关键性难题
月地高速再入返回是国际公认难题,风险很高,连美国、苏联也是历经多次试验才成功的。不解决这一问题,中国的航天器将无法从月球轨道安全重返地面。为解决这一问题,时任飞行器系统总设计师的杨孟飞带领团队加强了技术创新。面对再入走廊窄、初始导航精度要求准和首飞风险高等困难,他构建了由服务舱和返回器组成的双平台协同运行飞行器系统,创造性地提出了多学科系统设计方法、绕月自由返回轨道方案、高轨卫星导航定位方案和控制系统在轨联合标定方法,实现了再入角偏差优于指标近一个数量级的跃升。
针对气动不确定性大、再入热环境恶劣、落点精度要求高等困难,他在技术原创性上下足了功夫,创建了新型气动力预测方法,设计了返回器气动外形,保证全速域、全空域仅有唯一气动稳定配平点;率先采用了新研低密度烧蚀材料,突破轻量化热防护技术。多年的研究成果有效解决了返回器升阻比小、气动控制能力弱及航程长的国际难题,实现了我国空间技术在气动、防热和制导导航与控制(GNC)等领域的重大突破,为我国加快向更远深空拓展奠定了基础。

2014年11月1日中国探月工程三期再入返回飞行试验器返回器成功着陆
月地高速再入返回飞行器(英文:High-Speed Circumlunar Return and Reentry Spacecraft,代号:CE-5/T1)又称探月工程三期再入返回飞行试验器、嫦娥五号T1飞行试验器,绰号舞娣(取“5T”之谐音) 、小飞 ,是中国探月工程第三阶段月球采样返回任务前用于验证半弹道跳跃式再入气动、热防护、制导导航控制等关键技术的一颗探路星。杨孟飞提出空间飞行器月地高速再入返回系统方法,突破月地高速半弹道跳跃式再入返回关键技术,实现了我国首次再入速度达11km/s的月地安全准确返回:2014年10月24日,月地高速再入返回飞行器从西昌卫星发射中心由长征三号丙改II型运载火箭发射升空,绕月三日后在我国内蒙古乌兰察布市四子王旗境内着陆,使中国成为继苏联和美国之后,第三个成功实施航天器从月球轨道重返地面的国家。
月地高速再入返回工程实验的圆满成功,在国内外引起广泛的反响。俄罗斯航天新闻杂志社主编将其评价为:中国月球开发技术已是全球领先;我国成果鉴定委员会评价为:这项技术开拓了我国第二宇宙速度再入返回的深空探测新领域,对火星、小天体和载人深空探测具有重要先导作用。整体技术达到了国际先进水平,其中开伞点精度和返回器重量等六项技术指标已位于国际领先地位;两院院士认为:杨孟飞提出的月地高速再入返回技术,是中国十大科技进展之首。
项目推进过程中,杨孟飞做了技术总结和知识产权的整理,形成了一系列原创性研发成果,在2016年获得了“国防科技进步一等奖”(排名1)和第四届中国工业大奖,获得授权发明专利10项。
此外,他还发明一种复杂卫星甚高精度姿态控制方法和装置,解决了空间飞行器甚高精度、强适应控制关键科学问题,突破了高分辨率遥感卫星控制技术发展的瓶颈,高分辨率遥感卫星控制系统的研制提供了理论和方法;他提出的空间飞行器控制系统星(船/器)载计算机(以下简称控制计算机)抗恶劣环境的容错方法,突破了多机容错控制计算机故障诊断和系统重构关键技术,被应用于神舟飞船、月球探测器、卫星等多个系列空间飞行器。因对航天事业贡献巨大,2015年杨孟飞当选为国际宇航科学院终身院士;2017年11月当选为中国科学院院士。
2019年完成探月工程“回”的计划目标
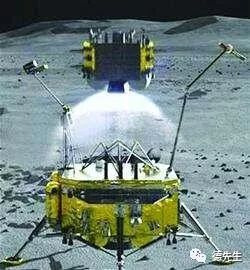
嫦娥五号上升器月面起飞效果图
对于我国探月工程现状,杨孟飞分析:我国月球探测工程分为“绕、落、回”三步,现已进入了第三步采样返回阶段。我国已具备了月球环绕、软着陆、表面巡视、月地返回等多项探测能力,建成了较为完善的月球探测工程体系,创造了第一次月球软着陆即成功的先例,已成功跨入了月球以远的深空探测国家行列。预计明年实施嫦娥五号任务,实现月球无人自动采样返回,圆满完成探月工程第三步“回”的规划目标。未来我国在月球探测方面会实现由“跟跑、并跑”向“领跑”的转变,抢占航天科技的战略制高点。
预计未来我国将实施四次重大深空探测任务:2020年实施我国首次火星探测任务,实现火星环绕和着陆巡视探测;后续规划实施第二次火星探测任务,实现火星表面采样返回;同时,规划实施一次小行星探测任务和一次木星及行星探测任务。希望在建国100周年时,我们的深空探测可以达到100AU(1AU=地球跟太阳的平均距离,约为1.5亿公里)。

推荐阅读