【泡泡一分钟】高效利用数据的分布式视觉SLAM(ICRA-19)
每天一分钟,带你读遍机器人顶级会议文章
标题:Data-Efficient Decentralized Visual SLAM
作者:Titus Cieslewski, Siddharth Choudhary and Davide Scaramuzza
来源:ICRA 2018
编译:蔡纪源
播音员: 刘畅
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“Data-Efficient Decentralized Visual SLAM”——高效利用数据的分布式视觉SLAM,该文章将发表在ICRA2018。
使用多机器人而不是一个机器人可以加速许多任务的完成,例如SLAM。对多机器人而言,在绝对定位系统无法使用的环境中,分布式视觉SLAM是一种重要且有效的工具,它可以将每个机器人的当前状态估计与所有机器人的当前和过去状态估计相关联。从概念上理解,视觉,表明系统依赖于摄像机这样的价格便宜、使用轻便且功能丰富的传感器;而分布式,则表明系统不会依赖于与中央地面站间的通信。
为了实现数据关联和协同优化,现有的分布式视觉SLAM系统会定期在所有机器人之间交换完整的地图数据,从而引起大量的数据传输,其计算复杂度也是机器人数量的平方。因此,如何高效使用数据是一项重要的研究内容。
作者在该项工作中,将最先进的分布式SLAM组件集成到一个新的、完整的分布式视觉SLAM系统中。如图1所示,其中,彩色块表示与其他机器人通信的组件,DVPR:分布式视觉地点识别,VO:视觉里程计,RelPose:几何验证和相对姿态估计,DOpt:分布式优化。
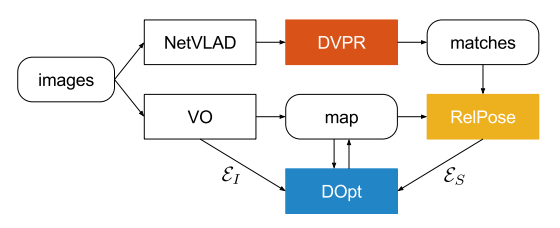
图1.每个机器人上运行的组件。
作者的方法仅在两个阶段执行高效的数据关联:第一阶段,紧凑的完整图像特征描述子NetVLAD被确定地仅发送到一个机器人;只有第一阶段成功的情况下才执行第二阶段,将相对姿态估计所需的数据仅发送到一个机器人。因此,数据关联的复杂度与机器人数量呈线性关系,并且可以使用高度紧凑的特征来表示场景地点。优化部分使用现有的最新分布式姿态图优化方法,仅交换最小的数据量,其量的大小与轨迹重叠多少呈线性相关。
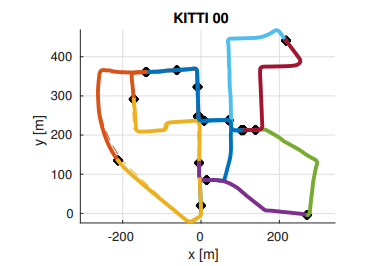
图2.分布式视觉SLAM实验结果。
图2中是本文方法在KITTI 00数据集上运行得到的结果,其中每一种颜色代表一条单独的子轨迹,黑色表示相应的匹配,虚线表示Groundtruth,结果表明本文方法可以得到全局一致的地图,而且对10个机器人用于分布式优化、视觉相对姿态估计、场景识别的交换数据总计才2MB。
作者在文中对提出的系统进行了详细描述,并表明了各个组件的瓶颈,作者表示将开放代码,目前待发布中, http://rpg.ifi.uzh.ch/publications.html。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
回复关键字“DVSLAM”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




