【泡泡汇总】最强 SLAM Datasets 合辑
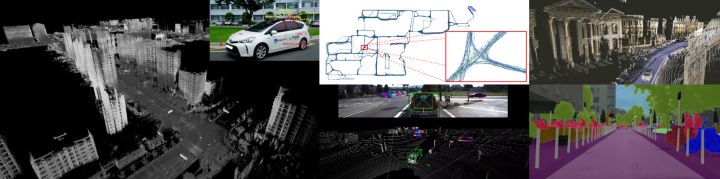
对于许多无人驾驶或者 SLAM 初学者来说,搞一个真车或者选择一款良好的设备来进行算法测试通常是个很头大的问题,且还需要解决很多诸如传感器之间标定不好,多传感器时间未做同步,没有真正的 groundtruth 来检验算法的好坏等等问题。
而跑 KITTI 便是解决这些问题的一种行之有效的方法,但如果我们想要更多的数据呢?本文来源于 GitHub 仓库 youngguncho/awesome-slam-datasets,整理出了几乎所有提供姿位姿和地图信息的各种 SLAM 数据集。在获得授权我们对其关键词进行了简要的翻译。可以直接访问我们的 GitHub repo。
https://github.com/PaoPaoRobot/awesome-slam-datasets
值得补充的是,原文尚未提及 Apollo Scape 数据集和 ICRA 2019 的 Dataset Generation and Benchmarking of SLAM Algorithms for Robotics and VR/AR workshop 中的相关数据集(如The UZH-FPV Drone Racing Dataset 无人机快速竞赛数据集)。
本文不仅收集了各式各样的数据集,和评估工具,并对其进行了按照不同标准的分类,供大家快速选择。
评估工具
主题
里程计
建图
多样场景
定位
感知
特点
大规模
长时间
复杂地图
极端情况
载体平台
汽车
移动机器人
无人机
水下自主航行器
水面无人艇
手持设备
环境
城市
室内
地形
水下
大家可以点击最后的原文链接查看本 GitHub Repo (PaoPaoRobot/awesome-slam-datasets) 来获得每个数据集的下载链接。
下图对每个数据集的来源机构,年份,环境,是否包含 GT pose,GT Map,IMU,GPS,语义标签,LIDAR,相机,事件相机,深度相机,雷达,声纳,多普勒速度记录,或其他相关信息进行了总结。
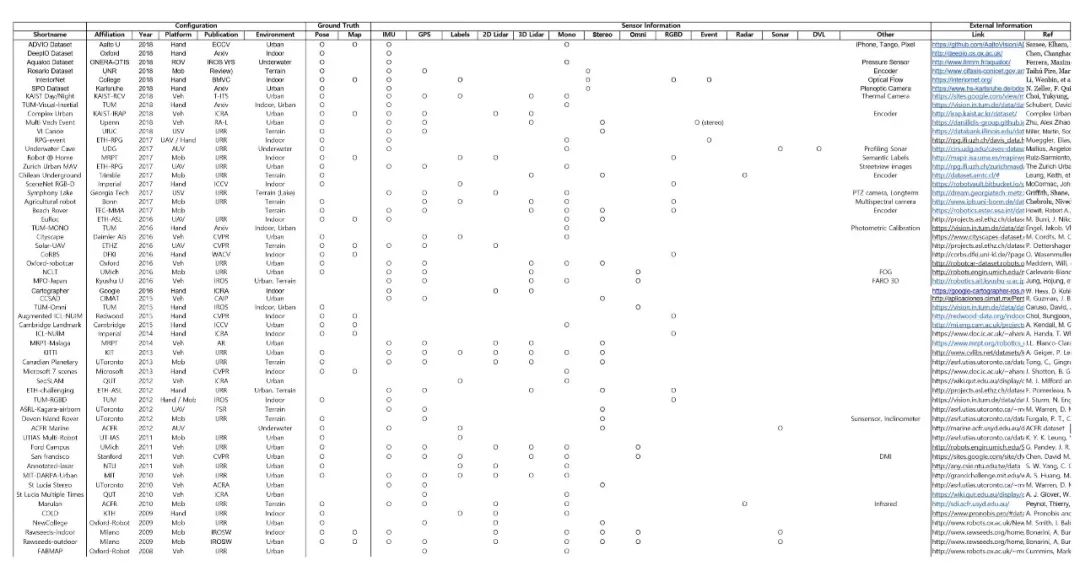
您可以在 repo 中查找到完整版表格或者根据此链接查看(需要科学上网):
https://sites.google.com/view/awesome-slam-datasets/
Trajectory Evaluation with Alignment
Python package for the evaluation of odometry and SLAM
SLAMBench2.0: SLAM performance evaluation framework
TUM-Visual-Inertial
Visual-Inertial Canoe Dataset
Multi Vehicle Stereo Event Camera Dataset
Zurich Urban Micro Aerial Vehicle Dataset
EuRoC MAV Dataset
TUM Monocular Cameras Dataset
Event-Camera Dataset and Simulator
TUM Omnidirectional Cameras Dataset
ICL-NUIM RGBD Dataset
TUM RGB-D SLAM Dataset and Benchmark
Google Cartographer
ADVIO Dataset
Deep Inertial Odometry Dataset
Aqualoc Underwater Dataset
Rosario Agricultural Dataset
Stereo Plenoptic Odometry Dataset
Collaborative SLAM Dataset (CSD)
Complex Urban
Multi-modal Panoramic 3D Outdoor Dataset (MPO)
Underwater Caves SONAR and Vision Dataset
Chilean Underground Mine Dataset
Oxford Robotcar Dataset
University of Michigan North Campus Long-Term (NCLT) Vision and LIDAR Dataset
Málaga Stereo and Laser Urban Data Set
KITTI Vision Benchmark Suite
Challenging data sets for point cloud registration algorithms
ACFR Marine Robotics Dataset
Ford Campus Vision and Lidar Dataset
InteriorNet
Visual-Inertial Canoe Dataset
Symphony Lake Dataset
Alderley Day/Night Dataset
St Lucia Multiple Times of Day
New College Vision and Laser Data Set
FABMAP Dataset
Dataset for metric-level localization
Cambridge Landmark Dataset
KITTI Vision Benchmark Suite
Microsoft 7 scenes
San Francisco Landmark Dataset
KAIST Day/Night Dataset
Robot @ Home Dataset
SceneNet RBG-D Dataset
Sugar Beets 2016, Agricultural Robot Dataset
CityScapes Dataset
KITTI Vision Benchmark Suite
Multi-Sensor Perception (Marulan) Dataset
InteriorNet
Complex Urban
Multi Vehicle Stereo Event Camera Dataset
Multi-modal Panoramic 3D Outdoor Dataset (MPO)
CityScapes Dataset
Solar-powered UAV Sensing and Mapping Dataset
Oxford Robotcar Dataset
CCSAD (Stereo Urban) Dattaset
Málaga Stereo and Laser Urban Data Set
KITTI Vision Benchmark Suite
Kagaru Airborne Stereo Dataset Dataset
ACFR Marine Robotics Dataset
KAIST Day/Night Dataset
Visual-Inertial Canoe Dataset
Symphony Lake Dataset
Oxford Robotcar Dataset
University of Michigan North Campus Long-Term (NCLT) Vision and LIDAR Dataset
Alderley Day/Night Dataset
St Lucia Multiple Times of Day
Complex Urban
Multi Vehicle Stereo Event Camera Dataset
Multi-modal Panoramic 3D Outdoor Dataset (MPO)
Málaga Stereo and Laser Urban Data Set
KITTI Vision Benchmark Suite
Challenging data sets for point cloud registration - algorithms
Underwater Caves SONAR and Vision Dataset: Underwater Environment
Chilean Underground Mine Dataset: Underground Environment
CityScapes Dataset: Foggy Scene
EuRoC MAV Dataset: Fast motion
Multi-Sensor Perception (Marulan) Dataset : Smoky, dust, and Rain condition
Complex Urban Dataset
Multi Vehicle Stereo Event Camera Dataset
KAIST Day/Night Dataset
Multi-modal Panoramic 3D Outdoor Dataset (MPO)
Oxford Robotcar Dataset
CityScapes Dataset
CCSAD (Stereo Urban) Dattaset
Málaga Stereo and Laser Urban Data Set
KITTI Vision Benchmark Suite
Day and Night with Lateral Pose Change Dataset
Alderley Day/Night Dataset
Annotated-laser Dataset (Link Broken)
San Francisco Landmark Dataset
Ford Campus Vision and Lidar Dataset
St Lucia Stereo Vehicular Dataset
St Lucia Multiple Times of Day
MIT DARPA Urban Challenge Dataset
FABMAP Dataset
Rosario Dataset
Sugar Beets 2016, Agricultural Robot Dataset
Chilean Underground Mine Dataset
Katwijk Beach Planetary Rover Dataset
Robot @ Home Dataset
University of Michigan North Campus Long-Term (NCLT) Vision and LIDAR Dataset
Rawseeds In/Outdoor Dataset
Canadian Planetary Emulation Terrain 3D Mapping Dataset
Devon Island Rover Navigation Dataset
Multi-Robot Cooperative Localization and Mapping Dataset
Multi-Sensor Perception (Marulan) Dataset
TUM RGB-D SLAM Dataset and Benchmark
New College Vision and Laser Data Set
Zurich Urban Micro Aerial Vehicle Dataset
Event-Camera Dataset and Simulator
Solar-powered UAV Sensing and Mapping Dataset
EuRoC MAV Dataset
Kagaru Airborne Stereo Dataset Dataset
Aqualoc Underwater Dataset
Underwater Caves SONAR and Vision Dataset
ACFR Marine Robotics Dataset
Visual-Inertial Canoe Dataset
Symphony Lake Dataset
Collaborative SLAM Dataset (CSD)
SceneNet RBG-D Dataset
Event-Camera Dataset and Simulator
Comprehensive RGB-D Benchmark (CoRBS)
Augmented ICL-NUIM Reconstruction Dataset
ICL-NUIM RGBD Dataset
Challenging data sets for point cloud registration algorithms
Cosy Localization Database (COLD)
ADVIO Dataset
Deep Inertial Odometry Dataset
InteriorNet
Stereo Plenoptic Dataset
ADVIO Dataset
Stereo Plenoptic Dataset
KAIST Day/Night Dataset
TUM-Visual-Inertial
Complex Urban
Multi Vehicle Stereo Event Camera Dataset
Zurich Urban Micro Aerial Vehicle Dataset
TUM Monocular Cameras Dataset
CityScapes Dataset
Oxford Robotcar Dataset
University of Michigan North Campus Long-Term (NCLT) Vision and LIDAR Dataset
Event-Camera Dataset and Simulator
CCSAD (Stereo Urban) Dattaset
TUM Omnidirectional Cameras Dataset
Cambridge Landmark Dataset
Málaga Stereo and Laser Urban Data Set
KITTI Vision Benchmark Suite
Alderley Day/Night Dataset
Challenging data sets for point cloud registration algorithms
Multi-Robot Cooperative Localization and Mapping Dataset
Ford Campus Vision and Lidar Dataset
San Francisco Landmark Dataset
Annotated-laser Dataset (Link Broken)
MIT DARPA Urban Challenge Dataset
St Lucia Stereo Vehicular Dataset
St Lucia Multiple Times of Day
New College Vision and Laser Data Set
Rawseeds In/Outdoor Dataset
FABMAP Dataset
Collaborative SLAM Dataset (CSD)
InteriorNet
TUM-Visual-Inertial
Multi-modal Panoramic 3D Outdoor Dataset (MPO)
Robot @ Home Dataset
SceneNet RBG-D Dataset
EuRoC MAV Dataset
TUM Monocular Cameras Dataset
Comprehensive RGB-D Benchmark (CoRBS)
TUM Omnidirectional Cameras Dataset
Augmented ICL-NUIM Reconstruction Dataset
ICL-NUIM RGBD Dataset
Microsoft 7 scenes
TUM RGB-D SLAM Dataset and Benchmark
Cosy Localization Database (COLD)
Rawseeds In/Outdoor Dataset
Google Cartographer
Rosario Agricultural Dataset
Visual-Inertial Canoe Dataset
Chilean Underground Mine Dataset
Symphony Lake Dataset
Sugar Beets 2016, Agricultural Robot Dataset
Katwijk Beach Planetary Rover Dataset
Solar-powered UAV Sensing and Mapping Dataset
Event-Camera Dataset and Simulator
Canadian Planetary Emulation Terrain 3D Mapping Dataset
Challenging data sets for point cloud registration - algorithms
Kagaru Airborne Stereo Dataset Dataset
Devon Island Rover Navigation Dataset
Multi-Sensor Perception (Marulan) Dataset
Aqualoc Underwater Dataset
Underwater Caves SONAR and Vision Dataset
ACFR Marine Robotics Dataset
如果有更多相关数据集,可以向 Younggun Cho 的GitHub repo 提交 PR 或者 issue。
Repo 作者:Younggun Cho
翻译:Yvon Shong
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




