CVPR 2020 | 化繁为简,弱监督目标定位领域的新SOTA - 伪监督目标定位方法

-
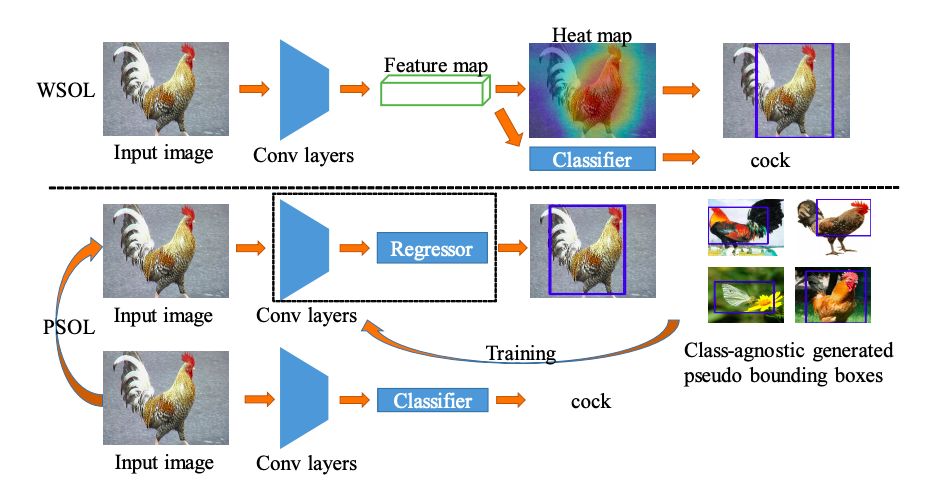
弱监督目标定位应该分为类不可知目标定位和目标分类两个独立的部分,提出PSOL算法 -
尽管生成的bbox有偏差,论文仍然认为应该直接优化他们而不需要类标签,最终达到SOTA -
在不同的数据集上,PSOL算法不需要fine-tuning也能有很好的定位迁移能力
相关工作
方 法
1、从WSOL到PSOL的范式转换
-
学习目标不明确,导致定位任务性能下降。独立的CNN不能同时进行定位和分类任务,因为定位需要目标的全局特征,而分类只需要目标的局部特征; -
CAM(Class Activation Mapping)存储一个三维特征图用于计算类别的heatmap,再用阈值过滤,但是一般阈值十分难确定。
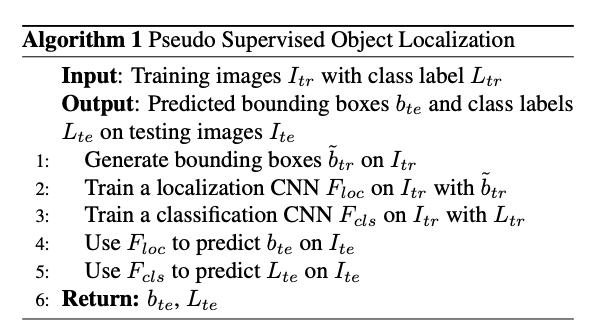
2、PSOL方法
 得到输入图片
得到输入图片
 的最后卷积的特征图
的最后卷积的特征图
 ,然后通过全局池化和最终的全连接层得到最后的标签
,然后通过全局池化和最终的全连接层得到最后的标签
 。根据
或
。根据
或
 ,得到特定类别在最终全连接中的权重
,得到特定类别在最终全连接中的权重
 ,对
,对
 中的空间位置进行channel-wise的加权并求和得到特定类别的heatmap
中的空间位置进行channel-wise的加权并求和得到特定类别的heatmap
 ,将
,将
 上采样到原来的大小,使用阈值过滤在产生最终的bbox。
上采样到原来的大小,使用阈值过滤在产生最终的bbox。
 张相同标签图的集合
张相同标签图的集合
 ,使用预训练模型
得到最终的特征图
,使用预训练模型
得到最终的特征图
 ,将这些特征图集合到一起得到大特征集
,将这些特征图集合到一起得到大特征集
 。在深度上使用主成分分析(PCA),得到特征值最大的特征向量
。在深度上使用主成分分析(PCA),得到特征值最大的特征向量
 ,然后对
进行channel-wise的加权并求和得到最终的heatmap
,然后对
进行channel-wise的加权并求和得到最终的heatmap
 ,将
上采样到原来的大小,然后进行零过滤以及最大连通区域分析得到bbox。
,将
上采样到原来的大小,然后进行零过滤以及最大连通区域分析得到bbox。
 ,
,
 为左上角坐标,
为左上角坐标,
 为宽高,首先将值进行转换
为宽高,首先将值进行转换
 ,
,
 ,
,
 ,
,
 ,其中
,其中
 和
和
 为输入图片的宽和高。使用两个全连接层以及对应ReLU的子网来回归,最终的输出进行sigmoid激活,训练使用最小平方差。
为输入图片的宽和高。使用两个全连接层以及对应ReLU的子网来回归,最终的输出进行sigmoid激活,训练使用最小平方差。
实 验
实验设置:
-
Datasets,使用ImageNet-1k和CUB-200,测试数据的bbox是准确标注的,而训练集上的bbox则通过前面提到的方法进行生成; -
Metrics,验证3个指标:知道GT类别的定位准确率(GT-known Loc),当预测与GT的 时正确;Top-1定位准确率(Top-1 Loc),Top-1的分类正确且GT-known Loc正确;Top-5定位准确率(Top-5 Loc),Top-5结果中存在分类正确且GT-known Loc正确;
-
Base Models,有VGG16/Inception V3/ResNet50/DenseNet161,没有增大图片输入,一些WSOL方法要用到类别信息的权重(单层全连接)来生成heatmap,而PSOL不用。为了公平起见,增加VGG-GAP,将所有全连接层换成单层全连接,而对于回归模型,仍然使用双层全连接层加对应的ReLU; -
Joint and Separate Optimization,对于联合优化模型(-Joint),在原来的基础上加入bbox回归分枝,然后同时训练模型的分类和定位。对于独立优化模型(-Sep),单独训练两个模型。

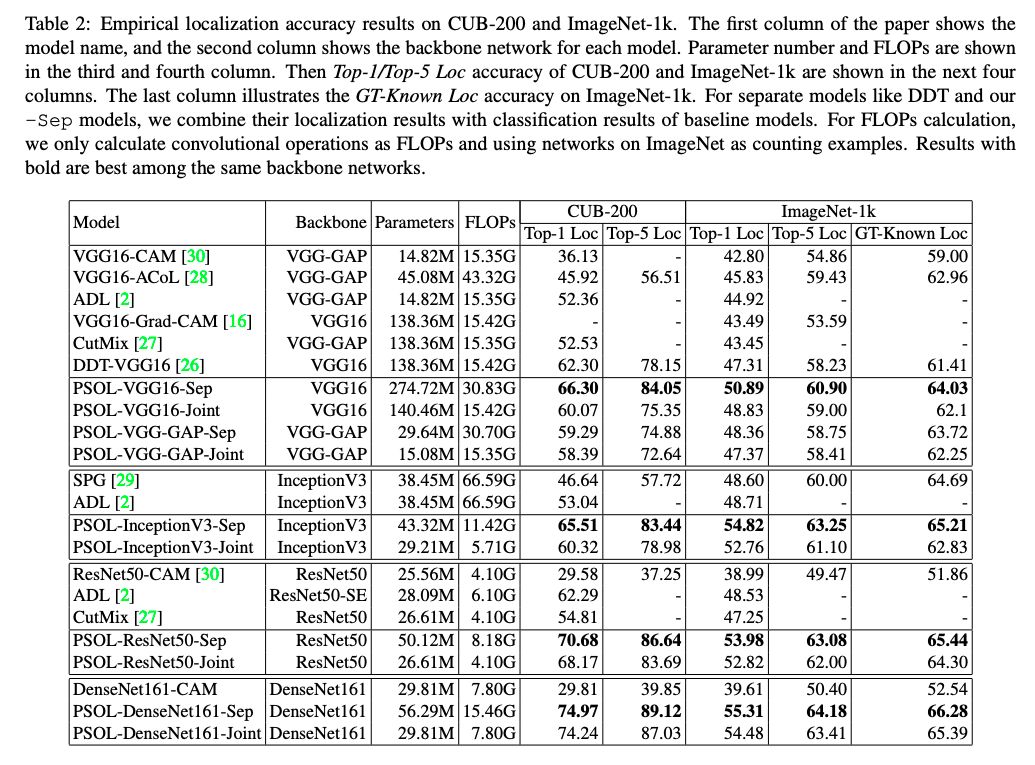
2、与SOTA的对比
-
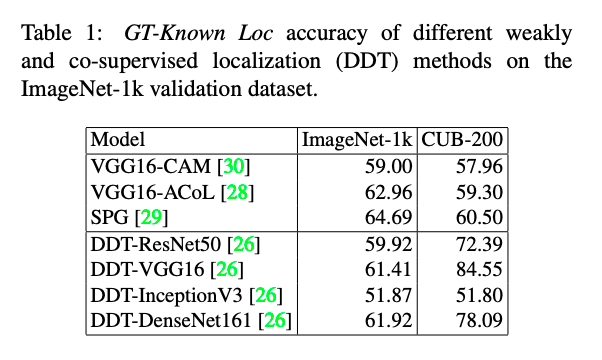
DDT本身就已经比WSOL方法要好,说明类不可知是有用的,WSOL应该分为两个独立的模型; -
所有PSOL方法分开训练都比联合训练要好,说明定位和分类学习到的内容不一样; -
POSL在CUB-200上都具有较大的优势,由于类别相似度较大,类别标签不一定能帮助定位,反而协同定位的DDT更占优; -
CNN有能力去处理有噪声的数据并且得到更高的准确率,PSOL模型的GT-Known Loc基本都比DDT-VGG16高; -
WSOL里的一些约束没有带到PSOL中,例如只允许单层全连接层以及更大的输出特征图,去掉常见的三层全连接层会影响准确率,VGG-Full比VGG-GAP要好。还有WSOL方法在复杂的网络上效果不好,如DenseNet,主要由于DenseNet使用多层进行分类,不仅仅是最后一层,最后一层的语义不如VGG等明确,而PSOL-DenseNet则避免了这个问题,达到最高准确率。
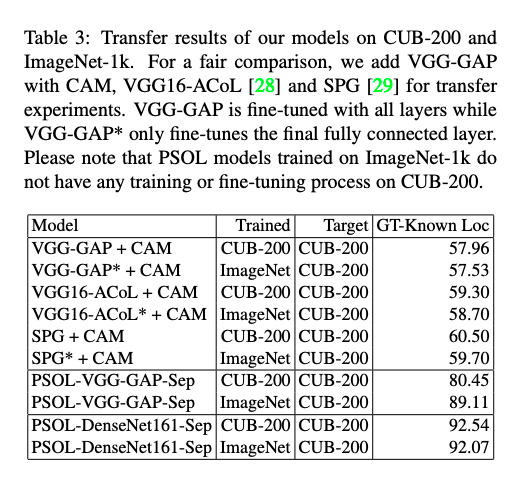
3、Transfer Ability on Localization
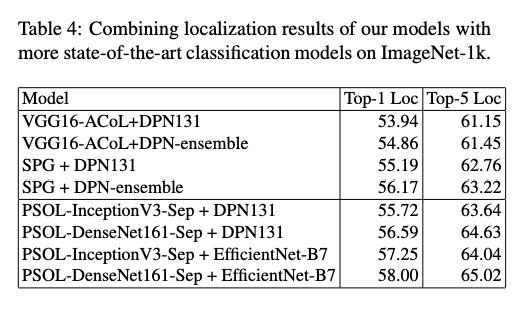
4、与SOTA分类进行结合
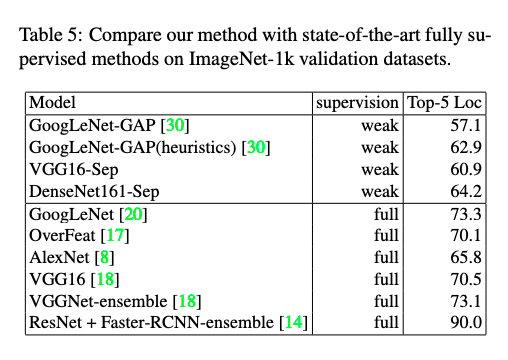
5、与完全监督方法进行比较
结 论
登录查看更多
相关内容
专知会员服务
87+阅读 · 2020年3月1日
Arxiv
6+阅读 · 2018年3月27日



相关VIP内容
专知会员服务
87+阅读 · 2020年3月1日
相关资讯
相关论文
Arxiv
6+阅读 · 2018年3月27日