【泡泡图灵智库】边缘化采样一致性
泡泡图灵智库,带你精读机器人顶级会议文章
标题:MAGSAC: Marginalizing Sample Consensus
作者:Daniel Barath, Jiri Matas, and Jana Noskova
来源:CVPR2019
播音员:
编译:李永飞
审核:尹双双
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是—— MAGSAC: Marginalizing Sample Consensus,该文章发表于CVPR2019。
本文提出了一种称为阈值一致性(σ-consensus)的方法,以消除RANSAC中人为设定内点阈值的需求。该方法边缘化噪声,而不是估计噪声σ。该方法通过加权最小二乘法,求解最优模型,而最小二乘法的权重由数据为内点的边缘概率确定。本文提出了一种新的评估模型的质量函数,由于该函数不需要使用变量σ,因此也就不需要确定内点集,以评估模型的质量。同时,本文也提出了一种新的基于边缘化的迭代停止条件。通过采用阈值一致性,MAGSAC不需要人为定义内点阈值,且能显著提高鲁邦估计的精度。该方法在对极几何和单应矩阵的估计问题上,在公共数据集的测试中,几何估计的精度高于当前最优的算法。另外,如果把阈值一致性估计方法作为后处理的方法,应用在RANSAC中,即使仅仅使用一次,也能在很多视觉问题上明显提高估计的精度,同时也不会增加很多的计算量。本文的源码https://github.com/danini/magsac。
主要贡献
本文的主要贡献为:
1、提出了一种阈值一致性算法,该算法不在需要人为设定内点阈值,而仅仅需要知道内点阈值的最大可能值;
2、提出了一种新的模型质量评估函数,由于该函数与内点阈值无关,因此不必求解内点集以评估模型;
3、提出了一种新的迭代终止条件,以适配本文的估计方法。
算法流程
PS:本文要解决的问题是,传统的RANSAC方法,通常需要人为设定一个内点阈值,以求取一个内点集,进而对模型的质量进行评估,因此内点阈值会很大程度影响模型的评估,进而影响算法估计的精度。本文的做法是:将内点的阈值σ看作一个随机变量,由于模型的质量评估函数Q是关于σ的函数,因此Q也可以看作是一个随机变量,我们通过求解Q的期望,能够获取模型质量的平均值Q*,而求解该期望的过程,就是边缘化掉σ的过程。另一方面,当我们求解得到一个模型,通常我们会使用内点集中所有点,对模型进行一个优化(通常称为“局部优化”),但是在本文的方法中,由于不存在内点阈值σ,因此也就无法判断一个点是否为内点,亦即无法得到内点集,本文采取的做法是,虽然无法判断一个点是否为内点,但是通过边缘化σ,可以求解一个点为内点得概率,将其作为权重进行加权最小二乘法优化,从而对模型进行优化。最后,由于迭代次数的估计也和内点阈值σ有关,同样通过边缘化σ的方法,求解新的迭代次数。下面对这一方法作具体的介绍:
相对于传统的RANSAC方法,本文的方法主要从三方面进行改进:模型质量评估、模型局部优化、迭代条件。
1、 模型质量评估
模型质量函数Q(θ, σ, P)是内点阈值σ的函数。现将内点阈值σ看作一个密度函数为f(σ)的随机变量,则Q(θ, σ, P)也为一个随机变量,可以通过该随机变量的期望Q∗作为模型质量的评估,即:

由于对σ的分布,我们没有任何先验信息,因此我们假设σ服从均匀分布:,
此时:

我们假设内点的误差分布为一个卡方分布g(r | σ)(由于在求解内点误差时,往往采用二范数,即各维的平方和,如果假设各维数据服从独立的高斯分布,那么总无法将服从卡方分布),同时野点服从均匀分布。此时,模型的似然函数为:
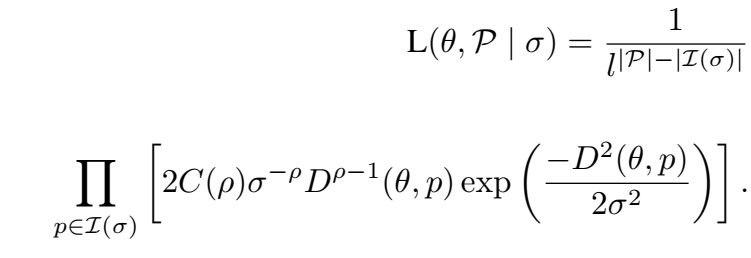
如果采用该似然函数的对数作为模型质量函数Q,则可得:
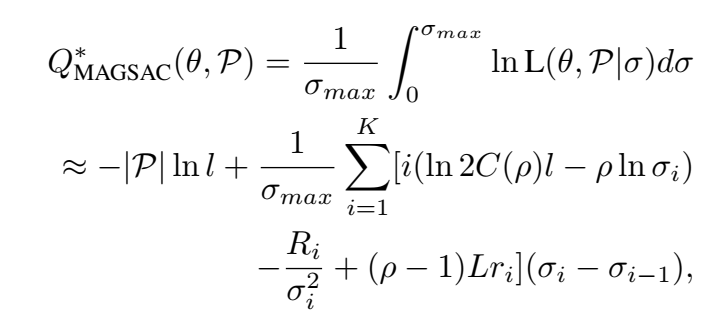
由于边缘化掉了参数σ,因此该函数与σ无关。
2、 模型优化
给一个初始的模型θ,我们希望进一步优化得到θσ,通常情况下,这是通过采用所有的内点进行模型估计得到。然而,由于本文的方法中,没有指定的σ,因此也无法得到内点集。然而,每个点为内点的概率确是可以求取的:

通过边缘化掉σ,可以得到:
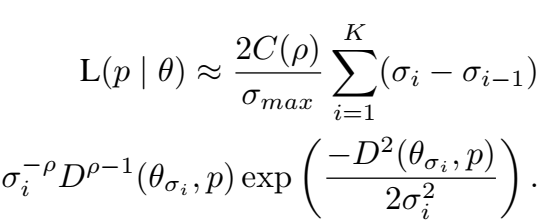
将该概率作为每个点的权重,进行加权最小二乘拟合,可进一步优化模型。
3、迭代条件
传统的RANSAC迭代次数依赖于内点率,而内点率依赖于内点阈值σ,因此,迭代次数也依赖于σ,即:
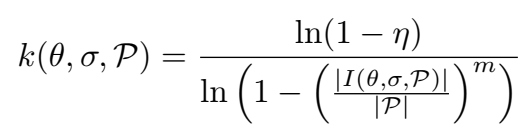
通过边缘化掉σ,可以求解新的迭代次数:
主要结果
本文将阈值一致性的方法应用在单应矩阵估计,及对极几何估计问题上,以验证算法的有效性。主要的实验结果如下:
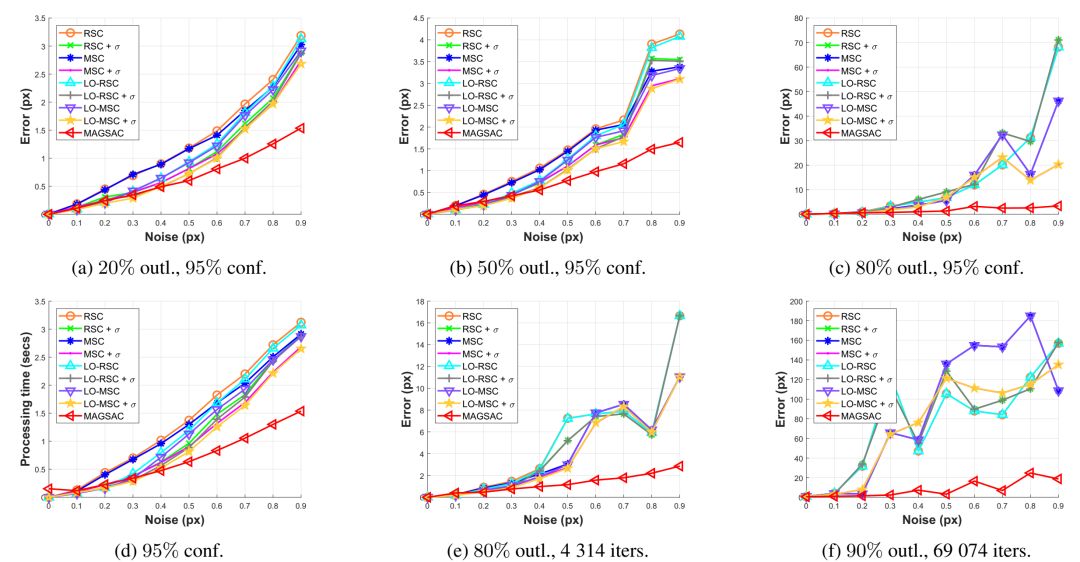
图1. 合成数据集上单应矩阵估计结果。对比的方法包括:RANSAC, MSAC, LO-RANSAC, LO-MSAC。后缀”+σ”表示在该方法的输出结果上采用了阈值一致性进行后处理。图a-c展示了在0.95置信度下拟合误差随σ的变化。图d展示了平均的算法耗时(单位为s)。图e-f展示了使用真实内点率在置信度为0.999情况下的结果。
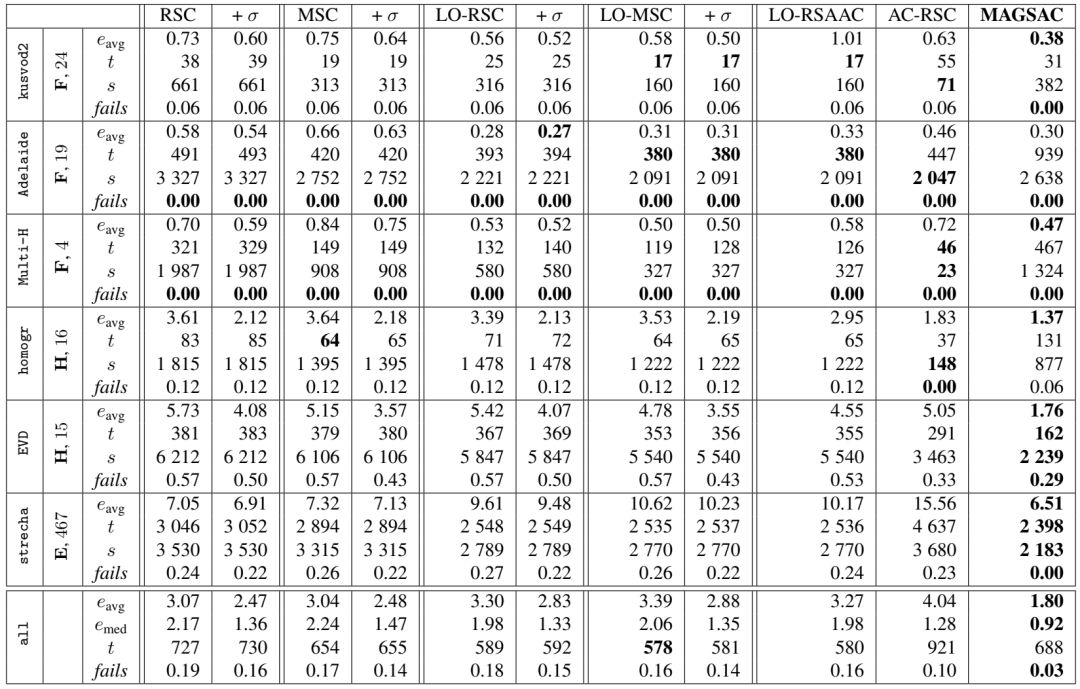
表1. 二视图对极几何估计精度。测试数据集包括:基本矩阵估计数据集(kusvod2,AdelaideRMF,Multi-H),单应矩阵估计数据集(homogr,EVD)和本质矩阵估计数据集(strecha)。该实验总共使用了545对图像。前三列分别为:数据集、求解问题、图像对数和属性。其他行显示了实验的平均结果(每对图片运行100次的平均结果),实验取置信度为95%。带”+σ”的列表示的将阈值一致性应用在其坐标的方法上的结果。每列的第一行为平均几何误差,第二、三行分别为平均处理时间和需要的样本数量。几何误差对于基本矩阵和本质矩阵估计问题来说,采用Sampson距离均方差,对于单应矩阵,采用重投影均方差。

Abstract
A method called, σ-consensus, is proposed to eliminate the need for a user-defined inlier-outlier threshold in RANSAC. Instead of estimating the noise σ, it is marginalized over a range of noise scales. The optimized model is obtained by weighted least-squares fitting where the weights come from the marginalization over σ of the point likelihoods of being inliers. A new quality function is proposed not requiring σ and, thus, a set of inliers to determine the model quality. Also, a new termination criterion for RANSAC is built on the proposed marginalization approach. Applying σ-consensus, MAGSAC is proposed with no need for a user-defined σ and improving the accuracy of robust estimation significantly. It is superior to the state-of-the-art in terms of geometric accuracy on publicly available real-world datasets for epipolar geometry (F and E) and homography estimation. In addition, applying σ-consensus only once as a post-processing step to the RANSAC output always improved the model quality on a wide range of vision problems without noticeable deterioration in processing time, adding a few milliseconds.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com

