【泡泡图灵智库】视觉里程计:基于最小解的单应性假设估计解耦合的旋转和平移(ICRA-38)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Visual odometry using a homography formulation with decoupled rotation and translation estimation using minimal solutions
作者:Banglei Guan, Pascal Vasseur, Cedric Demonceaux and Friedrich Fraundorfer
来源:ICRA 2018
播音员:申影
编译:尹双双
审核:杨健博
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——视觉里程计:基于最小解的单应性假设估计解耦合的旋转和平移,该文章发表于ICRA 2018。
本文提出基于单应性方法进行两视图相对运动估计的最小解方法。通过假设一个已知的垂直方向(比如利用IMU)和一个主导的地平面,我们即可以把旋转和平移解耦合,这样减少了用于计算运动假设所需的匹配点数。然后再基于解耦合得到许多不同的算法来有效地估计,它们也可以高效地计算一个最优的内点集,而不同于传统的RANSAC方法,采用穷举搜索或者直方图投票。我们在合成数据集以及KITTI数据集上评估了本文的方法,证明其能很好地充当道路驾驶场景中的视觉里程计。
主要贡献
本文工作的目标是针对RANSAC算法进行离群点筛选,需要先知道求解模型的最小点数,本文提出一种IMU增加约束的方法来最小化模型求解点数。
主要贡献有:
1、假定已知重力矢量(由IMU测量),且基于两视图之间的单应变换。
2 、通过分离旋转和平移,得到可以用1个匹配点的算法来进行运动假设。
3 、表明了方法在实践中取得了很好的效果,在KITTI数据集测试结果表明其可适用于无人驾驶环境。
算法流程


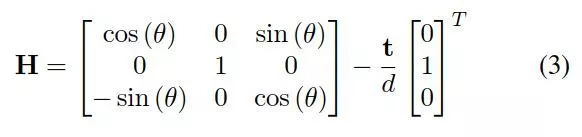
将相机朝向固定为重力方向后得到的H矩阵等式,t=[tx,ty,tz],上面的方程仍然有4 DOFs.
1. 0.5PT 旋转估计
通过一个点的关联可得到旋转角,而实际上只用特征的x坐标就可以。如果场景中包含无穷远点,旋转估计独立于平移进行,因为它们不受平移影响,则有:

为了进一步消除尺度参数,在方程(1)两边同时乘以一个反对称矩阵得到:

代入方程(4)以后得到方程组:

利用处于y轴法平面的无穷远点求解上面的方程组,而这些点其实都在水平面上,所以y坐标(像素坐标乘以反标定矩阵)等于0,则(7)(9)都为0。所以得到有:

由于不确定正弦符号的正负,就取两个解,然后每个点关联做出一个假设,用少量样本可以通过1pt RANSAC循环来找到一致的假设。另外,可以通过穷举来计算或直方图投票得到一个全局最优解。
2.平移估计方法
有了上面的旋转估计,影像j上的特征可以进行旋转变换后得到下面的方程:

A.1.5pt 线性解
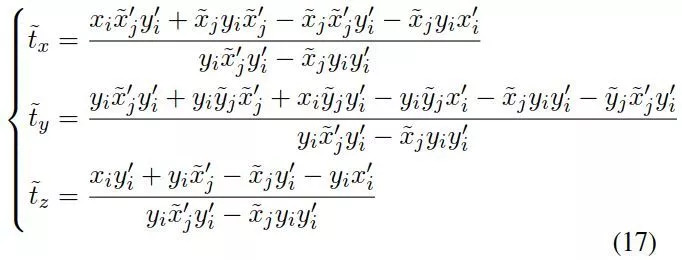
深度d未知,但是可以直接归入平移参数中去,所以可以通过方程(5)得到下面的方程组:
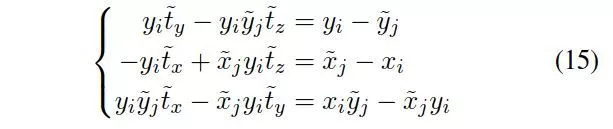
实际上方程组只有2个独立参数,因为反对称矩阵的秩为2,因此需要增加一个方程,则需要再增加第二个关联点,从(15)中任选一个即可:

为了找到最佳拟合解,需再进行一次RANSAC算法。这时可以用得到旋转平移参数构建一个本质矩阵E来验证所有的关联点集。
B.利用相对高度改变的离散采样的1pt方法
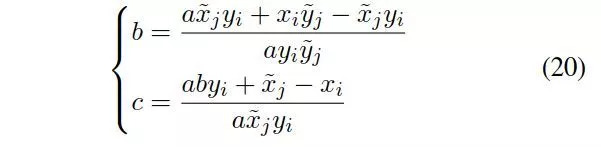
如果平移的三个参数有一个已知,就只需要1个关联点对就可以得到结果,这在一个合适的有界范围内对一个合适的参数进行离散采样是可能的。重写方程(12)得到:

假定a=ty/d是通过离散采样得到,2个未知参数为b=tx/ty,c=tz/ty。已知一个a以后,只需要一对匹配点得到b,c。从方程(15)得到:
C.利用x-z变换的离散采样的1pt方法
相对高度改变没有明显的步长和范围,但如果要在x-z平面上对平移的方向向量进行采样,可以表示为0~360°之间的角度离散化:


D.利用平面尺度变化离散采样的1pt方法
摄像平面平行地面这样的相机安装方式,可以把特征点坐标乘以一个旋转矩阵Rd,使其沿着相机x轴旋转90°。当相机下视时,上下移动会使得成像平面的尺度变化,点特征会从中心向内或向外移动。尺度变化直接和Z轴方向的平移有关。


假设平面尺度k=f*(hi/hj),f代表焦距。

主要结果
1、合成数据集实验
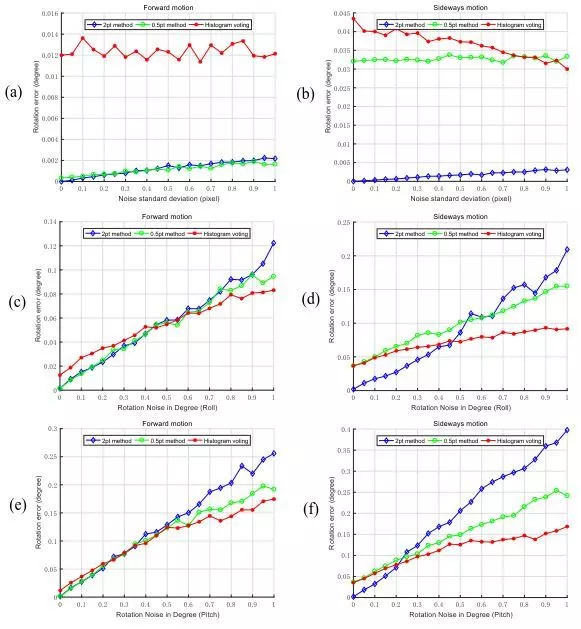
图1 “PLANAR”设定下的旋转估计误差
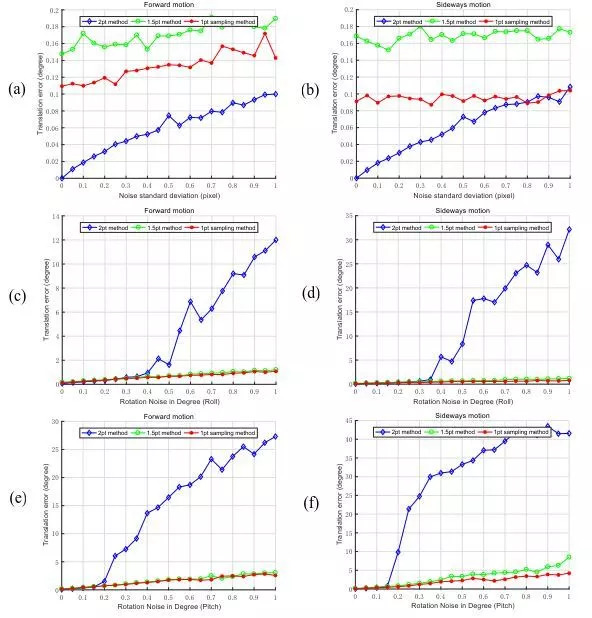
图2 “PLANAR”设定下的平移估计误差
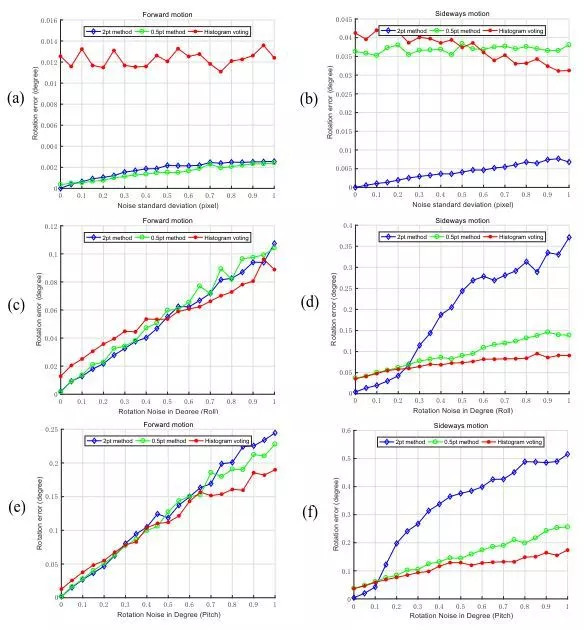
图3 “MIXED”设定下的旋转估计误差
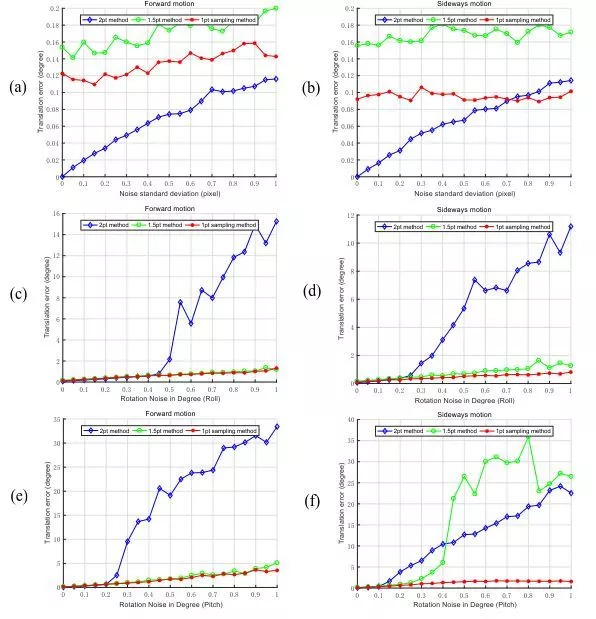
图4 “MIXED”设定下的平移估计误差
2、KITTI数据集实验
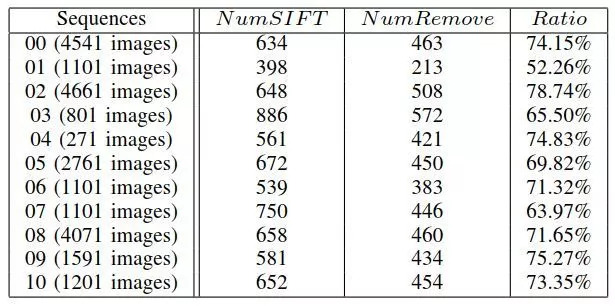
表1 测试y坐标对离群点去除的影响
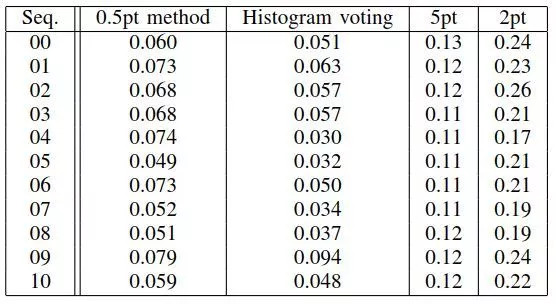
表2 KITTI数据集的旋转估计误差(DEGREES)
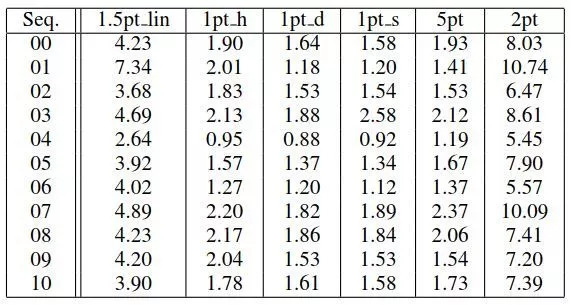
表3 KITTI数据集的平移估计误差(DEGREES)

表4 对于所有KITTI影像序列内点恢复率

Abstract
In this paper we present minimal solutions for
two-view relative motion estimation based on a homography formulation. By assuming a known vertical direction (e.g.from an IMU) and assuming a dominant ground plane we
demonstrate that rotation and translation estimation can be decoupled. This result allows us to reduce the number of point matches needed to compute a motion hypothesis. We then derive different algorithms based on this decoupling that allow an efficient estimation. We also demonstrate how these algorithms can be used efficiently to compute an optimal inlier set using exhaustive search or histogram voting instead of a traditional RANSAC step. Our methods are evaluated on synthetic data and on the KITTI data set, demonstrating that our methods are well suited for visual odometry in road driving scenarios.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




