【泡泡一分钟】动态环境下稳健的单目SLAM
每天一分钟,带你读遍机器人顶级会议文章
标题:Robust Monocular SLAM in Dynamic Environments
作者:Wei Tan, Haomin Liu, Guofeng Zhang, and Hujun Bao
来源:International Symposium on Mixed and Augmented Reality (ISMAR 2013)
播音员:申影
编译:陈建华
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——动态环境下稳健的单目SLAM,该文章发表于ISMAR2013。
在本文中,作者提出了一种新颖的实时单目SLAM系统,它可以在动态环境下稳健地工作。与传统方法不同,本文提出的系统允许部分场景是动态的,或者整个场景是逐渐变化的。
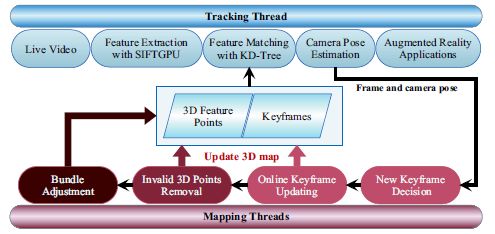
图1 本文系统的总体框架
本文的主要贡献是作者提出了一种新颖的关键帧在线表示和更新方法以自适应对动态环境进行建模,从而使得场景的外观和结构变化可以被有效地检测和处理。作者通过将特征点从关键帧投影到当前帧,对它们的外观和结构的对比,进而可以可靠地检测出变化的特征。同时,因为遮挡所引起的外观变化也可以被可靠地检测与处理。其中,存在较大变化区域的关键帧将被重新选择的关键帧替代。
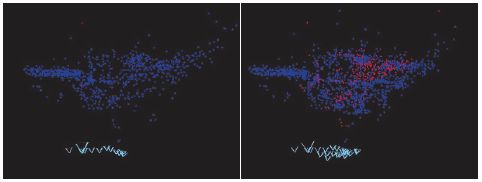
图2 三维点和关键帧的更新过程示意图

图3 动态物体遮挡的试验结果对比
(a)没有遮挡处理 (b)经过遮挡处理
另外,作者提出了一种基于先验的自适应RANSAC算法(PARSAC)。该算法即使是在内点比例十分低的情况下也能有效移除外点,从而使得相机即使是在非常具有挑战性的环境下也能进行可靠的位姿估计。最后,试验结果表明,本文所提出的系统可以在动态环境下稳健地工作,并且在性能上超过了当前的主流SLAM系统(例如PTAM)。
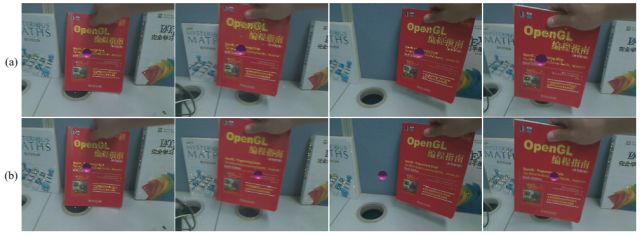
图4 动态环境下外点移除算法效果对比
(a)RANSAC (b)PARSAC
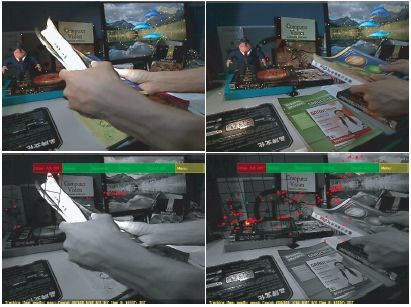
图5 不同SLAM系统的试验结果对比
(a)本文系统 (b)PTAM

Abstract
We present a novel real-time monocular SLAM system which can robustly work in dynamic environments. Different to the traditional methods, our system allows parts of the scene to be dynamic or the whole scene to gradually change. The key contribution is that we propose a novel online keyframe representation and updating method to adaptively model the dynamic environments, where the appearance or structure changes can be effectively detected and handled. We reliably detect the changed features by projecting them from the keyframes to current frame for appearance and structure comparison. The appearance change due to occlusions also can be reliably detected and handled. The keyframes with large changed areas will be replaced by newly selected frames. In addition, we propose a novel prior-based adaptive RANSAC algorithm (PARSAC) to efficiently remove outliers even when the inlier ratio is rather low, so that the camera pose can be reliably estimated even in very challenging situations. Experimental results demonstrate that the proposed system can robustly work in dynamic environments and outperforms the state-of-the-art SLAM systems (e.g. PTAM).
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com