大白话用Transformer做Object Detection


大白话 Attention


为什么要用Transformer做目标检测?
DETR 具有两大核心优势:

DETR网络结构
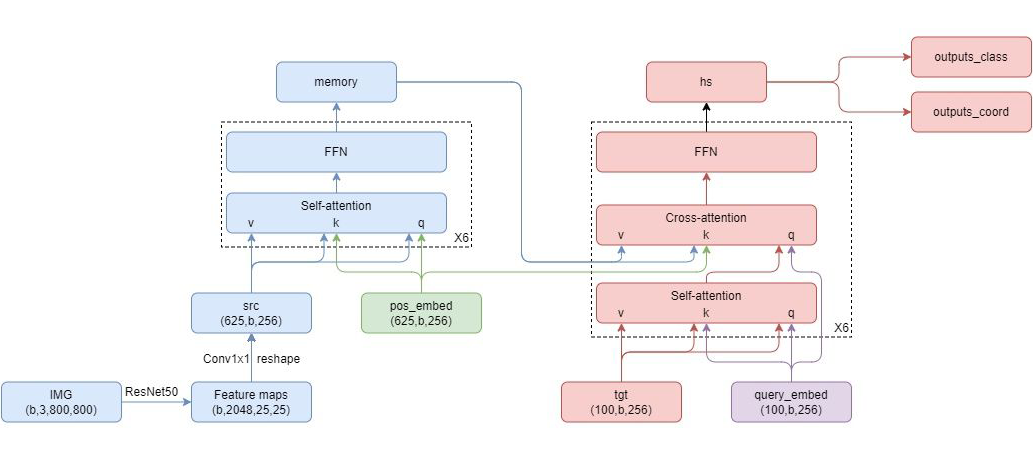
3.1 Transformer encoder
3.2 Transformer decoder

为何DETR难以收敛?


一系列改进工作

Future direction

参考文献
更多阅读



#投 稿 通 道#
让你的文字被更多人看到
如何才能让更多的优质内容以更短路径到达读者群体,缩短读者寻找优质内容的成本呢?答案就是:你不认识的人。
总有一些你不认识的人,知道你想知道的东西。PaperWeekly 或许可以成为一座桥梁,促使不同背景、不同方向的学者和学术灵感相互碰撞,迸发出更多的可能性。
PaperWeekly 鼓励高校实验室或个人,在我们的平台上分享各类优质内容,可以是最新论文解读,也可以是学术热点剖析、科研心得或竞赛经验讲解等。我们的目的只有一个,让知识真正流动起来。
📝 稿件基本要求:
• 文章确系个人原创作品,未曾在公开渠道发表,如为其他平台已发表或待发表的文章,请明确标注
• 稿件建议以 markdown 格式撰写,文中配图以附件形式发送,要求图片清晰,无版权问题
• PaperWeekly 尊重原作者署名权,并将为每篇被采纳的原创首发稿件,提供业内具有竞争力稿酬,具体依据文章阅读量和文章质量阶梯制结算
📬 投稿通道:
• 投稿邮箱:hr@paperweekly.site
• 来稿请备注即时联系方式(微信),以便我们在稿件选用的第一时间联系作者
• 您也可以直接添加小编微信(pwbot02)快速投稿,备注:姓名-投稿

△长按添加PaperWeekly小编
🔍
现在,在「知乎」也能找到我们了
进入知乎首页搜索「PaperWeekly」
点击「关注」订阅我们的专栏吧

登录查看更多
相关内容

Attention机制最早是在视觉图像领域提出来的,但是真正火起来应该算是google mind团队的这篇论文《Recurrent Models of Visual Attention》[14],他们在RNN模型上使用了attention机制来进行图像分类。随后,Bahdanau等人在论文《Neural Machine Translation by Jointly Learning to Align and Translate》 [1]中,使用类似attention的机制在机器翻译任务上将翻译和对齐同时进行,他们的工作算是是第一个提出attention机制应用到NLP领域中。接着类似的基于attention机制的RNN模型扩展开始应用到各种NLP任务中。最近,如何在CNN中使用attention机制也成为了大家的研究热点。下图表示了attention研究进展的大概趋势。
Arxiv
0+阅读 · 2022年6月22日
Arxiv
16+阅读 · 2019年12月16日




相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年6月22日
Arxiv
16+阅读 · 2019年12月16日