【泡泡一分钟】SSD6D:基于RGB的三维检测和6自由度位姿估计(ICCV2017-159)
每天一分钟,带你读遍机器人顶级会议文章
标题:SSD-6D: Making RGB-Based 3D Detection and 6D Pose Estimation Great Again
作者:Wadim Kehl, Fabian Manhardt, et al.
来源:International Conference on Computer Vision (ICCV 2017)
编译:陈世浪
审核:颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在本文中,作者提出了一种新的方法来检测三维模型实例和仅仅从RGB数据中估计其六自由度位姿。为此,作者拓展了流行的SSD范式,以覆盖整个6自由度位姿空间,并只对合成模型的数据进行训练。
作者提出的方法在多个有挑战性的RGB-D数据集进行测试表明其方法优于目前最先进的方法。此外,作者的方法在10赫兹左右的效果比相关的方法都要快很多。为了可再现性,作者公开了相关训练网络和代码。
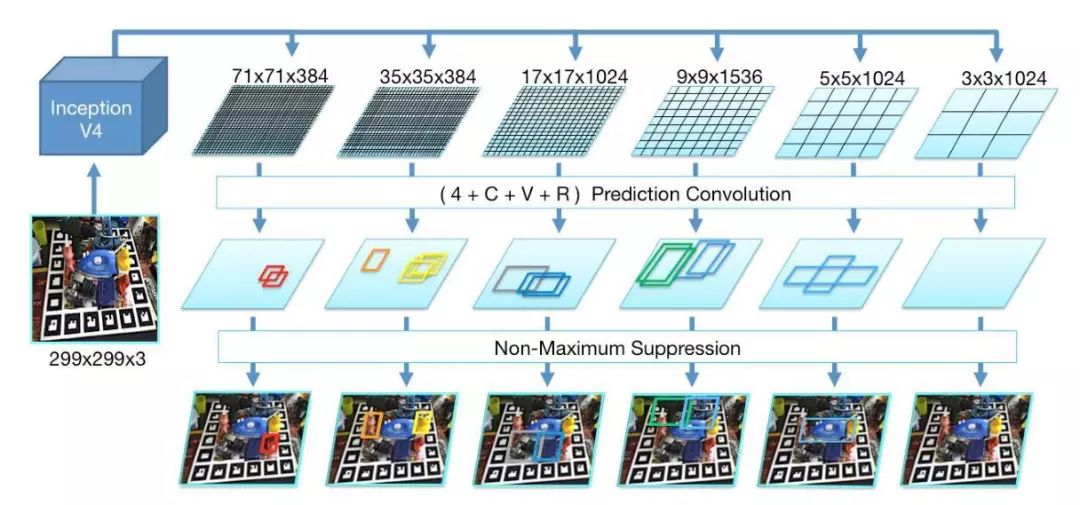
网络结构
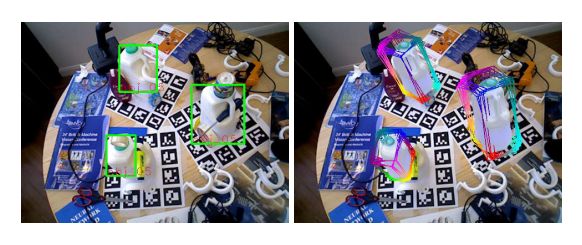
错误例子


Abstract
We present a novel method for detecting 3D model instances and estimating their 6D poses from RGB data in a single shot. To this end, we extend the popular SSD paradigm to cover the full 6D pose space and train on synthetic model data only. Our approach competes or surpasses current state-of-the-art methods that leverage RGBD data on multiple challenging datasets. Furthermore, our method produces these results at around 10Hz, which is many times faster than the related methods. For the sake of reproducibility, we make our trained networks and detection code publicly available.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com