耶鲁两栖机器龟登Nature封面,一种部件搞定水上、陆地行动
机器之心报道
陆地行走、海里畅游,这款机器龟在形态和性能上与真龟别无二致!
现存最古老的爬行动物龟,它们既可以在陆上生活,又可以在水中生活。
不同于龟等两栖动物,主要栖息于一种生态环境的动物往往表现出专门的身体规划和步态运动学,以提高运动效率,而在其他环境中的性能反而下降。相反,半水生和半陆生动物表现出固有的形态和步态折中,这使得它们在两种环境中的效率都很高。
研究界中出现了针对特定环境的专业化移动机器人,它们通常仅限于在陆地或水中运行,而不能兼顾两者。因此,发展两栖机器人显得非常重要。
近日,来自耶鲁大学的研究人员发明了一种两栖机器人,其灵感来自于海龟和陆龟,该机器人通过一种被称为「自适应形态发生,adaptive morphogenesis」的过程完成。他们还为这款机器人取了一个特别贴切的名字,英文叫 ART(Amphibious Robotic Turtle),中文为「两栖机器龟」。
该研究于 10 月 12 日登上《Nature》封面。

论文地址:https://www.nature.com/articles/s41586-022-05188-w
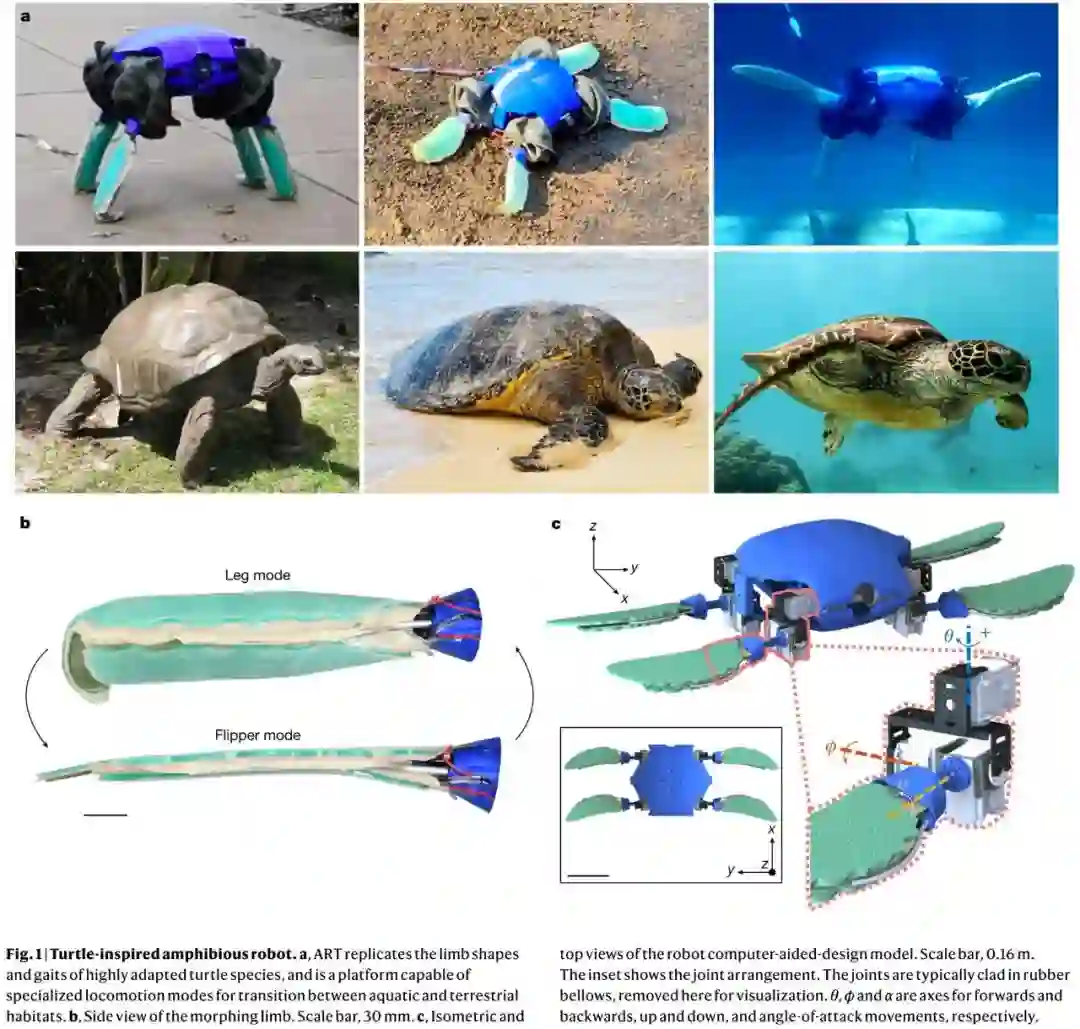
说到海龟和陆龟,他们都有着相似的身体,四肢和一个壳,但它们有独特的肢体形状和步态,以适应它们特定的环境。正如论文作者之一 Rebecca Kramer-Bottiglio 所说,海龟的鳍状肢较长,便于游泳,而陆龟的腿较圆,便于行走时负重。
该机器龟结合了两者的特点,其具有可变形的四肢,能够根据周围环境调整四肢形状、刚度和动作。当将机器龟从一种环境过渡到另一种环境时,其四肢使用可变刚度材料和人造肌肉来改变其形状。ART 具有灵活的四肢:

ART 的四肢可变形:

当将这款机器人放在陆地上时,它能以各种步态在陆地上行走。

到达水域后,ART 就将腿变成鳍状肢,使其能够以基于升力和阻力的水上步态进行畅游。

ART 从陆地到达水里:

Nature 首席物理科学编辑 Karl Ziemelis 表示:你几乎可以认为「自适应形态发生」是机器人按需进化的形式。
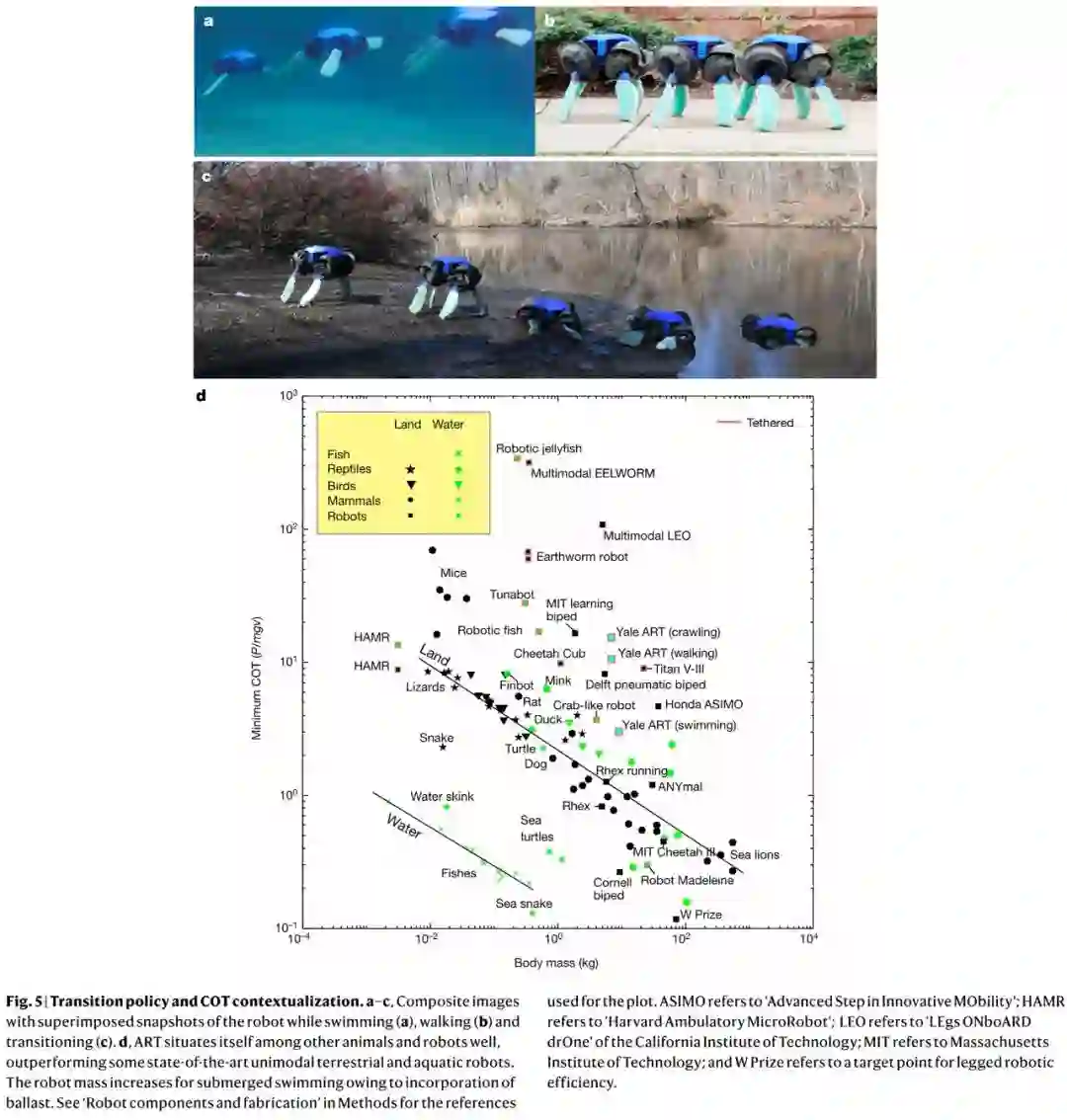
ART 与其他两栖机器人的不同之处在于,它能利用相同的部件在水上和陆地环境中进行推进,而其他机器人需要添加多个推进机制,才能适应不同的环境,这样一来,就会导致能源效率低下。「我们的研究结果表明,自适应形态发生可以提高机器人在多种环境中移动的效率,」通讯作者 Kramer-Bottiglio 表示。
这种两栖机器龟潜在的应用很多,包括沿海岸线的生态系统监测、海洋养殖。此外该机器龟还将帮助研究人员进行复杂冲浪区和其他环境过渡区的运动物理学研究。
两栖机器龟怎么形成的?
下图 a 中,ART 复制了高度适应海龟物种的肢体形状和步态,并且构成一个能够在水生和陆生栖息地之间过渡的特殊运动模式平台。
图 b 为变形肢体的侧视图,比例尺为 30mm。
图 c 为机器龟 CAD 模型的等轴视图和俯视图,比例尺为 0.16m。其中,θ、φ和α分别表示向前和向后、向上和向下以及迎角运动的轴。
下图 2 为 ART 的游泳形态。图 a 为机器龟通过调节浮力进行水面和水下游泳。
图 b 为受龟启发的扑动步态的迎角偏移与运动消耗(Cost of Transport, COT)的关系。三个不同区域的突出展示:在左侧(红色)区域,拍动的 COT 高于游动;在中间(黄色)区域,COT 在 10 度的跨度内下降,指出机器龟产生主要推力的过渡;在右侧(蓝色)区域,COT 接近其最佳值。
图 c 和 d 分别表示用于游泳和拍动步态的一个步态周期(顶部)、x 步态周期(中间)和 z 步态周期(底部)的重要步骤。

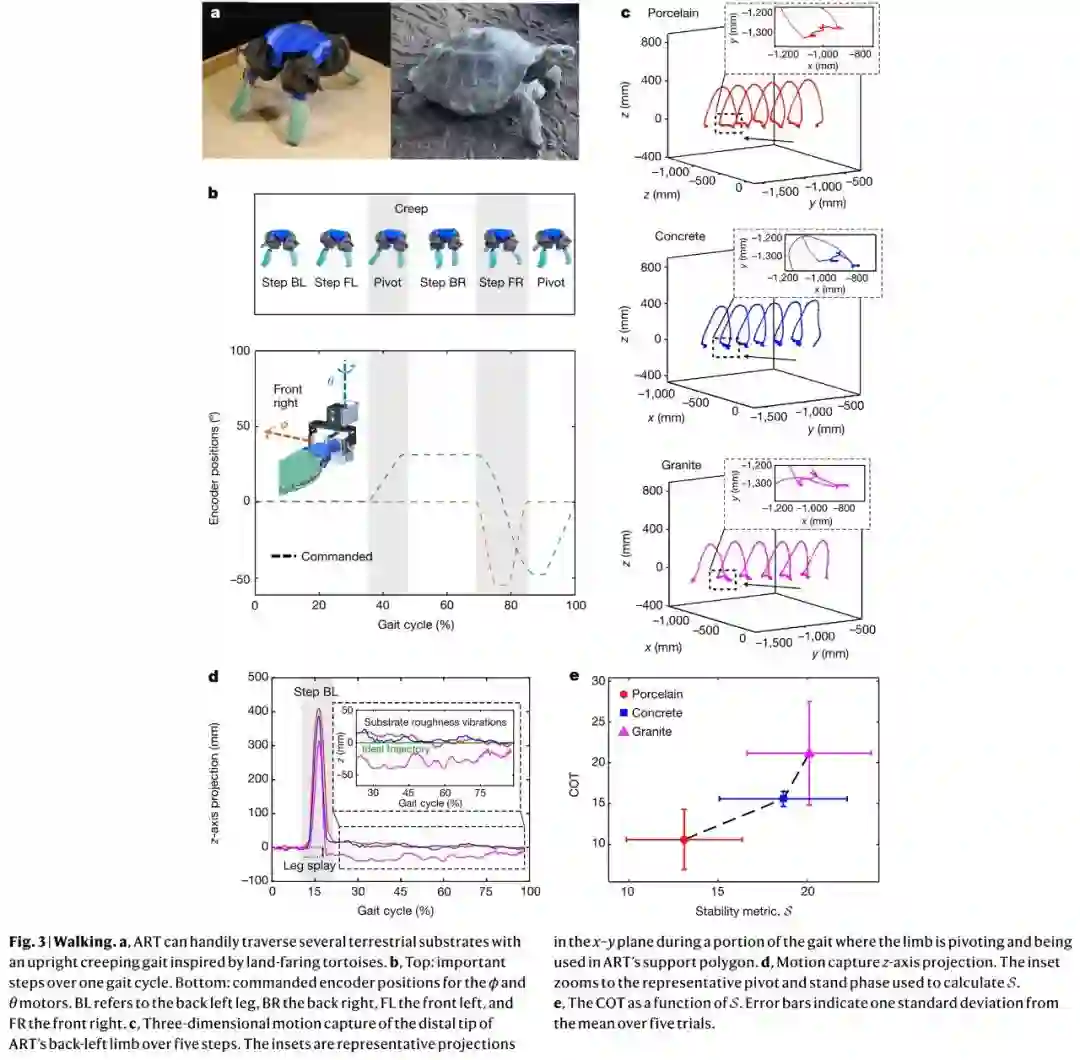
下图 3 为 ART 的行走形态。图 a 表示 ART 能够以直立爬行步态轻松穿越多个陆地基质。
图 b 顶部表示一个步态周期的重要步骤,底部表示φ和θ电机的指令编码器位置。BL 指左后腿,BR 指右后腿,FL 指左前腿,FR 指右前腿。
图 c 表示 ART 左后肢远端的 3D 运动捕捉超过 5 个步骤。图 d 表示运动捕捉 z 轴投影。
下图 5 为过渡策略和 COT 情境化。其中,图 a-c 表示 ART 的游泳(a)、行走(b)和过渡(c)形态。图 d 表示,ART 在与其他动物和机器人的比较中表现出色,优于一些最先进的单峰陆地和水上机器人。并且由于压载物的并入,水下游泳时机器龟的质量也增加了。
更多技术细节请参阅原论文。
参考链接:https://news.yale.edu/2022/10/12/morphing-limbs-robot-travels-land-and-water
声纹识别:从理论到编程实战

© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com

