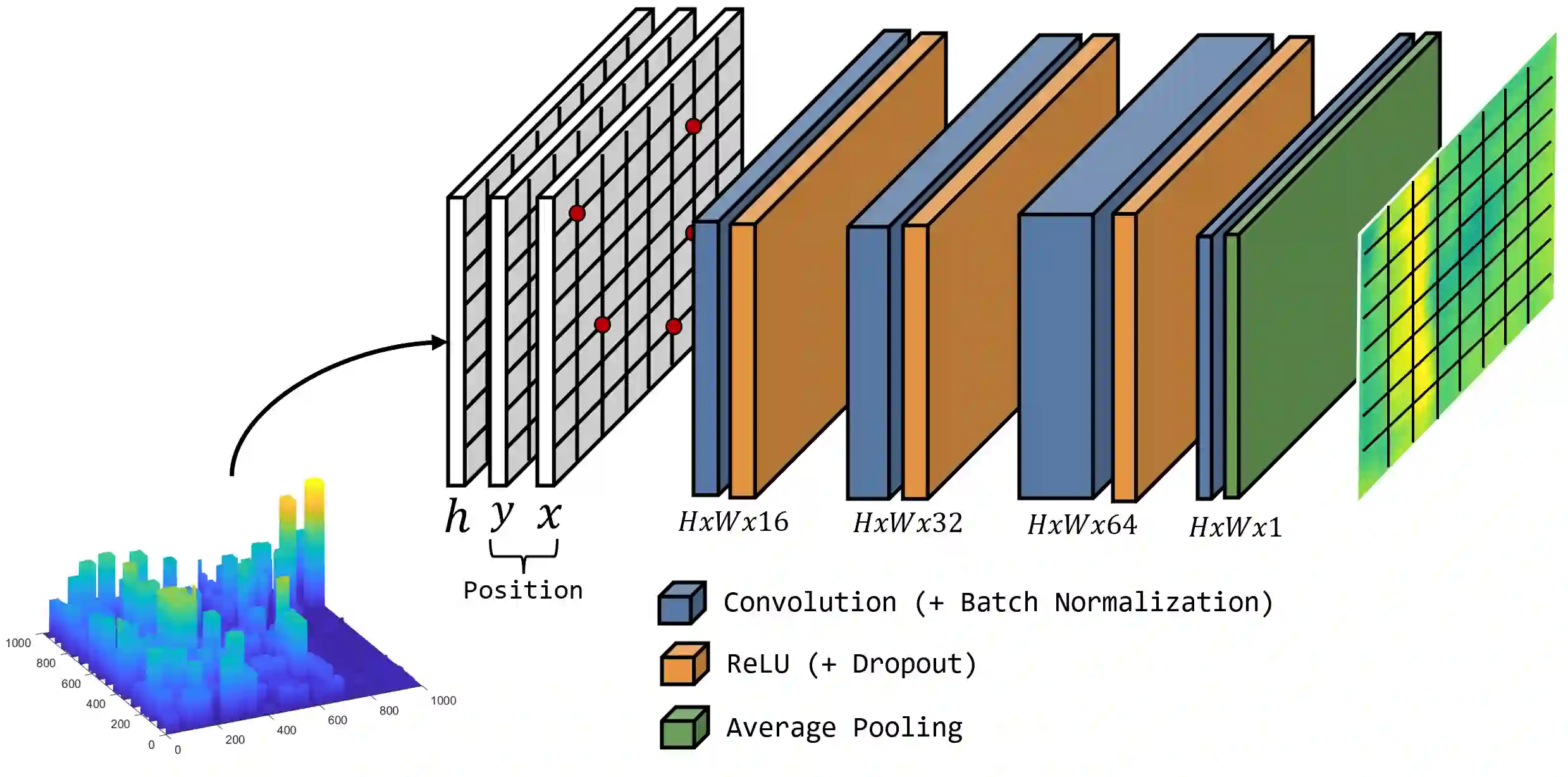
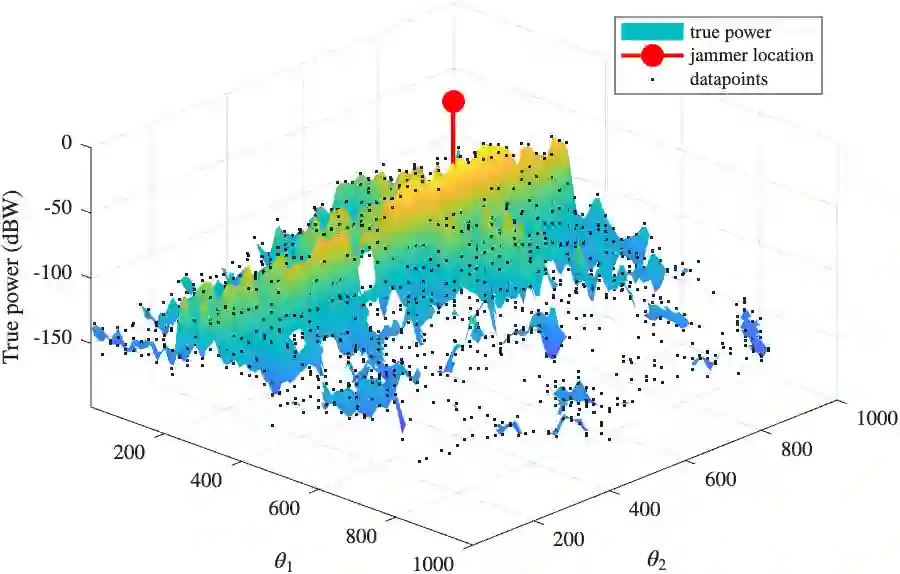
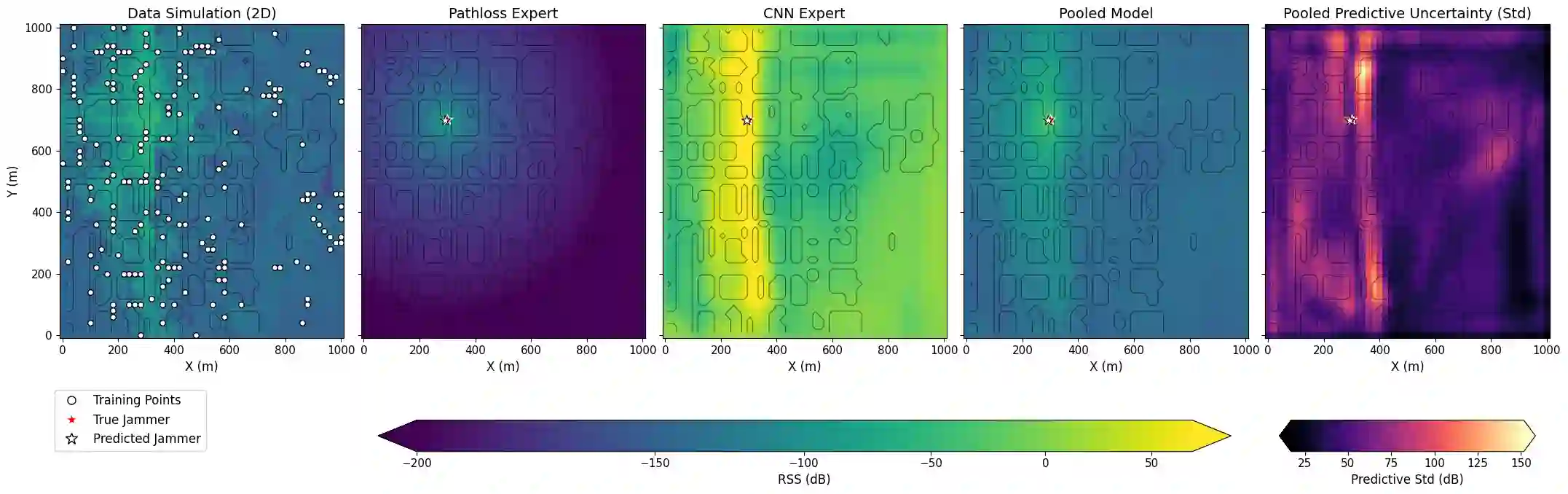
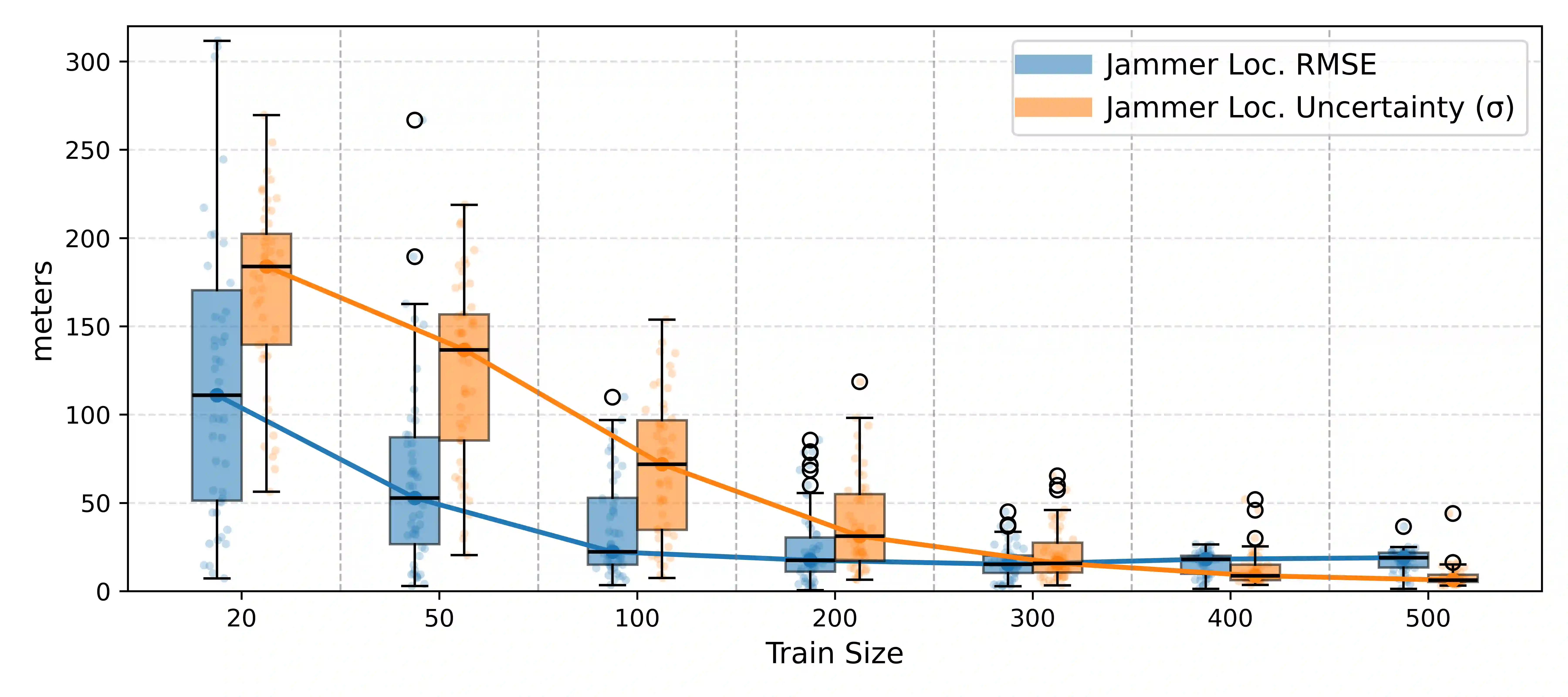
Global Navigation Satellite System (GNSS) signals are vulnerable to jamming, particularly in urban areas where multipath and shadowing distort received power. Previous data-driven approaches achieved reasonable localization but poorly reconstructed the received signal strength (RSS) field due to limited spatial context. We propose a hybrid Bayesian mixture-of-experts framework that fuses a physical path-loss (PL) model and a convolutional neural network (CNN) through log-linear pooling. The PL expert ensures physical consistency, while the CNN leverages building-height maps to capture urban propagation effects. Bayesian inference with Laplace approximation provides posterior uncertainty over both the jammer position and RSS field. Experiments on urban ray-tracing data show that localization accuracy improves and uncertainty decreases with more training points, while uncertainty concentrates near the jammer and along urban canyons where propagation is most sensitive.
翻译:全球导航卫星系统(GNSS)信号易受干扰,尤其是在多径效应和阴影效应导致接收功率失真的城市区域。以往基于数据驱动的方法虽能实现合理的定位,但由于空间上下文信息有限,对接收信号强度(RSS)场的重构效果较差。本文提出一种混合贝叶斯混合专家框架,通过对数线性池化融合物理路径损耗(PL)模型与卷积神经网络(CNN)。路径损耗专家确保物理一致性,而CNN则利用建筑高度图捕捉城市传播效应。通过拉普拉斯近似的贝叶斯推断,可同时获得干扰源位置与RSS场的后验不确定性。基于城市射线追踪数据的实验表明:随着训练点数量增加,定位精度提升且不确定性降低;不确定性主要集中于干扰源附近及传播最敏感的城市峡谷区域。