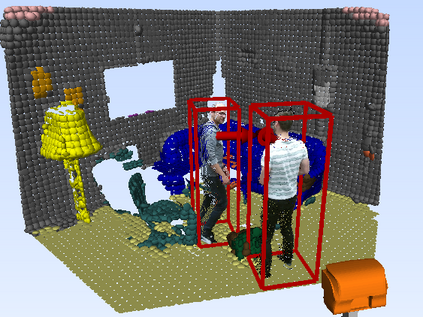
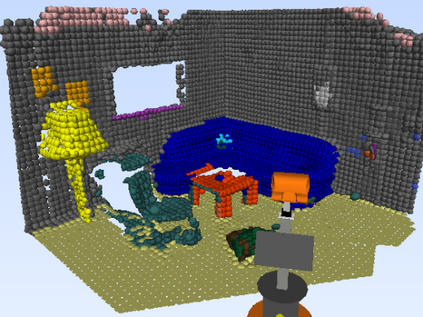
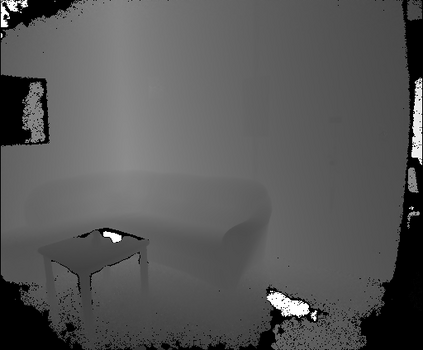
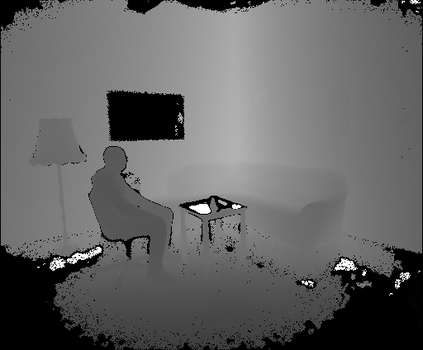
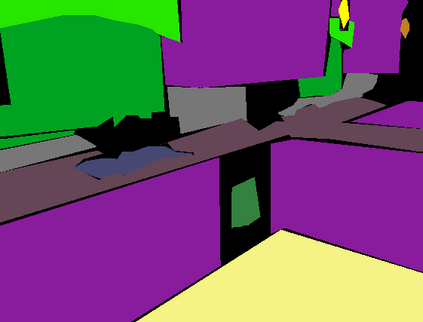
Analyzing scenes thoroughly is crucial for mobile robots acting in different environments. Semantic segmentation can enhance various subsequent tasks, such as (semantically assisted) person perception, (semantic) free space detection, (semantic) mapping, and (semantic) navigation. In this paper, we propose an efficient and robust RGB-D segmentation approach that can be optimized to a high degree using NVIDIA TensorRT and, thus, is well suited as a common initial processing step in a complex system for scene analysis on mobile robots. We show that RGB-D segmentation is superior to processing RGB images solely and that it can still be performed in real time if the network architecture is carefully designed. We evaluate our proposed Efficient Scene Analysis Network (ESANet) on the common indoor datasets NYUv2 and SUNRGB-D and show that we reach state-of-the-art performance while enabling faster inference. Furthermore, our evaluation on the outdoor dataset Cityscapes shows that our approach is suitable for other areas of application as well. Finally, instead of presenting benchmark results only, we also show qualitative results in one of our indoor application scenarios.
翻译:对移动机器人在不同环境中的行为进行彻底分析的场景至关重要。 语义分割可以加强各种后续任务, 如( 模拟辅助的) 人感、 (语义的) 自由空间探测、 (语义的) 映像和( 语义的) 导航。 在本文中, 我们建议了一种高效而有力的 RGB- D 分割法, 可以使用 NVIDIA TensorRT 进行高度优化, 并因此非常适合作为移动机器人现场分析复杂系统中的一个共同初始处理步骤。 我们显示 RGB- D 分割法优于只处理 RGB 图像, 如果网络结构设计周密, 它仍然可以实时进行 。 我们评估了我们关于通用室内数据集NYUv2 和 SURGB- D 的高效显示分析网络( ESANet), 并显示我们达到最先进的性能, 同时又能更快地推断。 此外, 我们对户外数据设置城市景的评价表明, 我们的方法适合其它的应用领域 。 最后, 而不是仅仅显示室内情景中的一种应用的质量结果 。