
在过去的十年中,使用自主无人机系统进行测量、搜索和救援或最后一英里的交付已经成倍增加。随着这些应用的兴起,需要高度稳健、对安全至关重要的算法,这些算法可以在复杂和不确定的环境中操作无人机。此外,快速飞行使无人机能够覆盖更多的地面,这反过来又提高了生产力,并进一步加强了它们的使用情况。开发用于高速导航的算法的一个代表是自主无人机竞赛的任务,研究人员对无人机进行编程,使其尽可能快地使用机载传感器和有限的计算能力飞过一连串的闸门并避开障碍。速度和加速度分别超过80公里/小时和4克,在感知、规划、控制和状态估计方面提出了重大挑战。为了实现最大的性能,系统需要对运动模糊、高动态范围、模型不确定性、空气动力干扰和通常不可预知的对手具有鲁棒性的实时算法。本调查涵盖了自主无人机竞赛的进展,包括基于模型和学习的方法。我们提供了该领域的概述,其多年来的演变,并以未来将面临的最大挑战和开放性问题作为结论。
纵观历史,人类一直痴迷于比赛,在那里,身体和精神的健康受到了考验。最早提到的正式比赛可以追溯到公元前3000年的古埃及,法老被认为在赛德节上进行了一场比赛,以显示他的身体素质,表明他有能力统治王国[1], [2]。随着时代的发展,人类已经从步行比赛转向使用战车、汽车、飞机,以及最近的四轴飞行器[3]。虽然船只经常变化,但自早期的赛车以来,有一件事一直保持不变,那就是把任务作为科学和工程发展的催化剂,这是一个反复出现的主题。最近,我们看到有人推动将人类从循环中移除,将高度复杂的赛车任务自动化,以推动车辆性能超越人类所能实现的。
A 为什么要举办无人机比赛?
无人机竞赛是一项受欢迎的运动,有高知名度的国际比赛。在传统的无人机比赛中,每架无人机都由一名人类飞行员控制,他从机载摄像机接收第一人称视角(FPV)的实时流,并通过无线电发射器驾驶无人机。图1中可以看到无人机的机载图像。人类无人机飞行员需要多年的训练来掌握先进的导航和控制技能,这些技能是在国际比赛中取得成功所必需的。这种技能对于必须快速、安全地在复杂环境中飞行的自主系统也很有价值,其应用包括灾难响应、空中运送和复杂结构的检查。例如,在搜救场景中,无人机必须能够在复杂的环境中快速导航,以最大限度地扩大其空间覆盖。更简单地说,能够快速飞行的无人机就能飞得更远[4]。

图1:无人机竞赛是一项迅速普及的运动,对手在由一系列门组成的预设赛道上竞争。自主的无人机竞赛研究旨在建立能够在这种比赛中胜过人类飞行员的算法。 a) 自主的无人机竞赛任务在过去几年中获得了研究界的大量关注,每年相关出版物的数量不断增加就说明了这一点。 b) 自主的无人机依靠视觉和惯性传感器来估计自己的状态,以及对手的状态。
检查任务的自动化可以拯救生命,同时比人工检查更有成效。根据最近一项关于无人驾驶飞行器(UAV)在桥梁检测中的使用的调查[5],大多数用于检测任务的无人机依靠GPS导航,而检测效率的最大限制因素是无人机的耐力和机动性。此外,作者指出,美国几个交通部用于勘察的最流行的无人机并不是完全自主的,需要专业的人类飞行员[5]。高度灵活的无人机系统的商业和安全优势是显而易见的,然而对自主无人机竞赛的研究也可以帮助我们对人类飞行员的视觉处理和控制是如何工作的获得新的理解,如[6]所示。
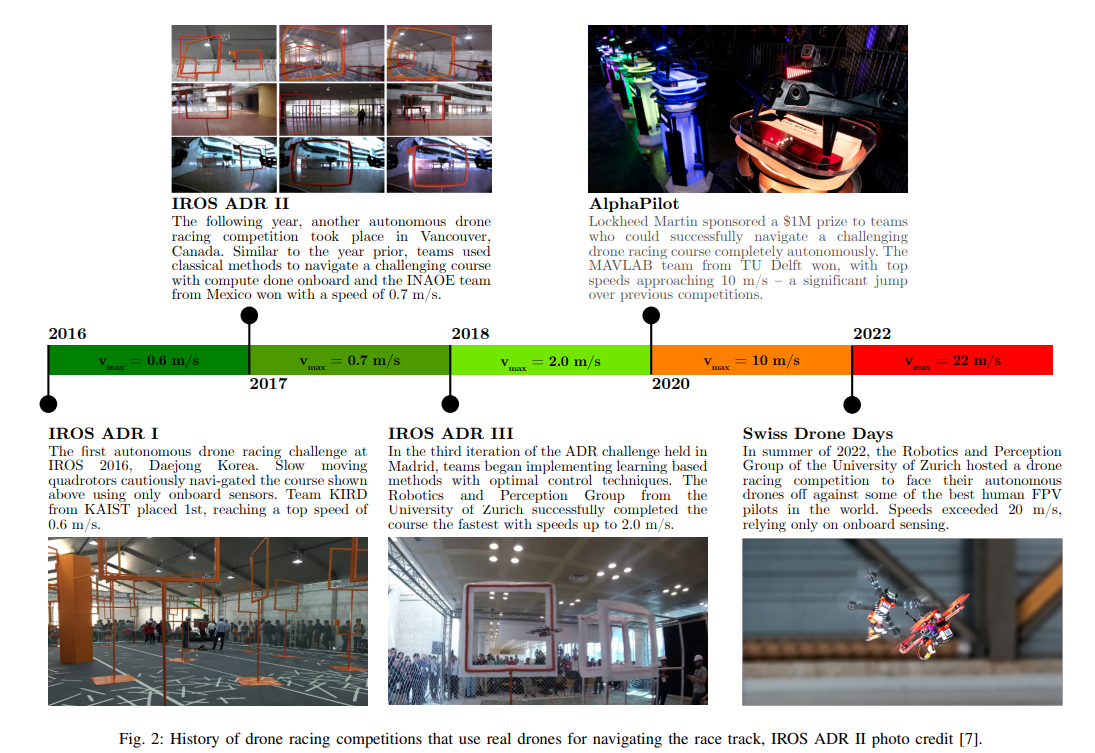
在过去的五年里,已经启动了几个项目来鼓励该领域的快速进展,如DARPA的快速轻量级自主(FLA)[8]和欧洲研究理事会的AgileFlight[9]。这些项目的资金池都超过100万美元,并具有巨大的商业潜力,这对研究人员和企业家探索敏捷飞行研究的新模式有很大的激励作用。诸如IROS'16-19自主无人机竞赛系列[10]、NeurIPS 2019的无人机游戏[11]和2019年AlphaPilot挑战赛[12]、[13]等竞赛为研究人员提供了进一步的机会,以竞争方式相互比较他们的方法。图2中可以看到这些比赛所取得的进展的描述。
无人机竞赛是一个具有挑战性的基准,可以帮助研究人员衡量复杂的感知、规划和控制算法的进展。比赛中的自主无人机必须能够在几十毫秒的范围内进行感知、推理、计划和行动,所有这些都在一个计算有限的平台上进行。除了具有很大的挑战性外,无人机竞赛任务提供了一个衡量自主飞行机器人技术进展的唯一标准:单圈时间。解决这个问题需要算法高效、轻便,并实时提供最佳决策和控制行为。此外,如图1所示,我们看到该领域的论文数量逐年呈指数式增长。
据作者所知,这是第一份关于自主无人机竞赛技术状况的调查。这一概述对于那些希望在现有工作之间建立联系、了解当前和过去方法的优势和劣势,以及确定前进方向的研究人员来说是非常有用的,这将使该领域获得有意义的进展。
B 任务说明
无人机竞赛的任务是在最短的时间内驾驶四旋翼飞机按照给定的顺序通过一系列的门,同时避免碰撞。人类在这项任务上的表现令人吃惊,他们以远远超过100公里/小时的速度飞行,只用第一人称视角的摄像机作为他们的感官输入。除此之外,专家级飞行员可以在几分钟内迅速适应新的赛道,然而专业无人机飞行员所需的感觉运动技能需要多年的训练才能获得。
对于自主无人机来说,要成功完成这项任务,它必须能够检测对手和赛道上的航点,计算它们在三维空间中的位置和方向,并计算出一个动作,使其能够尽快地在赛道上导航,同时还能控制一个高度非线性系统的极限。这在三个不同方面具有挑战性。感知、计划和控制。其中任何一个方面的不良设计都可能造成比赛的胜负,而比赛的胜负可能由不到十分之一秒的时间决定。
本文的结构如下。首先,在第1节中详细讨论了无人机的建模过程,包括空气动力学、电池、电机、相机和系统的非线性因素。第2节然后在第二节中介绍了一个经典的机器人管道。第3节介绍了一个经典的机器人管道,并深入探讨了与敏捷飞行相关的文献,分为感知、规划和控制三个子节。之后,在第4节中我们深入研究了基于学习的感知、规划和控制的方法,这些方法依赖于机器学习界的最新进展。然后,第5节讨论了仿真工具的发展,这些工具可以使敏捷飞行的应用得到快速发展。第6节介绍了无人机竞赛的历史和用于每项竞赛的方法。接下来,在第7节中提供了一个开放源代码库、硬件平台和研究人员的数据集的摘要。最后,在第8节中对未来对自主无人机竞赛感兴趣的研究人员的机会和挑战进行了前瞻性的讨论。

