将便携式自主水下航行器(AUV)作为矢量磁力计的搭载平台具备快速部署优势。该能力可在作战区域部署,根据作战相关的局部磁场环境对舰船磁场特征进行实时测量。本项目旨在论证基于AUV的舰船磁力测距技术可行性。本科学报告分析了两项试验采集的磁力数据:试验分别采用静态与动态两种AUV模式。鉴于测量数据集仅包含舰船有限次通过AUV的航次数据,通过等效磁源技术将数据拟合至舰船合成模型。经深度与航向校正的预估舰船磁场特征,被绘制在与固定站点消磁作业同规格的标准网格上。为验证AUV生成磁场特征的可靠性,特将其与固定站点测量结果进行对比。误差值处于可接受范围,故试验证实了便携式AUV作为矢量磁力计搭载平台的潜力,但仍需后续技术改进。
本研究分析了通过水下静态或动态AUV搭载磁力计实施舰船磁力测距的可能性。试验取得的积极成果表明,该新型测距方法可应用于各类舰船部署海域的磁场测量。这将使水雷对抗任务能在作战地域及时空近距条件下高效执行。
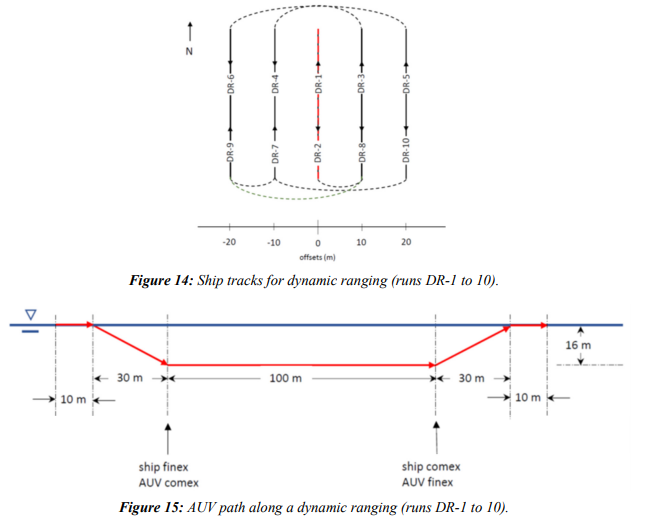
传统上,加拿大皇家海军(RCN)舰船磁场特征需驶过母港海底铺设的三轴磁力传感器静态阵列进行测量。但固定站点常远离舰船作业区,故提出在作战区域采用便携式传感器测量磁场特征的方案。近期RCN启动开发以AUV为搭载平台的便携式磁测系统:本地化测量可调整消磁系统,补偿因地磁场变化导致的感应磁场波动,并校正永久磁化强度偏差。现行方案通过在多个AUV搭载磁力计与惯性测量单元[1-4]实现移动水面舰船的磁场特征测量。尽管AUV水面航行时使用全球定位系统(GPS)定位,但水下磁力传感器相对于舰船的精确位置标定仍具挑战性。系列试验旨在确立基于AUV的磁场特征测量最佳流程:首次试验采用静态AUV测量移动目标磁场;第二次采用动态AUV测量静态目标;第三次以动态AUV测量逆向移动目标。试验目标在于获取舰船特定深度水平面("声束深度")投影的磁场特征。因每台AUV仅配备单一磁力传感器,需多次航行方能完成一次特征测量。试验期间舰船与AUV协同机动,分别测量舰船磁北、磁南、磁东和磁西四个航向的磁场特征。试验采用IMOTUS-R [5]与IVER-3 [6]两款AUV,其搭载的矢量磁力计可模拟固定磁测阵列单点传感器功能。首阶段于2022年11月在BC省萨尼奇附近海域实施,采用IMOTUS-R AUV与ORCA级巡逻训练艇COUGAR。AUV悬停于水柱中,舰船以不同水平偏距通过,并以正交航线采集四向磁场数据。受时间限制,此阶段仅完成有限测量。第二、三阶段于2023年2月在新斯科舍省哈利法克斯开展,使用IVER-3 AUV与拖船:先固定北向舰船,AUV在16米深度沿南北/东西方向扫描磁场;随后AUV在16米深度沿固定北-南/东-西轨道航行,舰船逆向移动。鉴于稀疏数据集(仅含数次通行记录),通过等效磁源技术[4]将数据拟合至舰船合成模型计算特征值。作为基准对照,两艘舰船分别在BC省维多利亚和NS省哈利法克斯的固定磁测站点进行测量。本报告的数据分析与磁建模目标在于获取消磁作业规格的网格化磁场特征,并与固定站点测量结果进行对比分析。