射频(RF)发射器的定位在许多军事和民用应用中都具有重要意义。近十年来,小型移动无人驾驶航空器(UAV)的发展取得了快速进展,这为自主执行发射器定位提供了一种途径。无人机的飞行路径会显著影响定位效果,使得路径规划成为移动发射器定位系统的重要组成部分。本论文的主题是为一架使用测向测量来定位静止发射器的无人机进行路径规划。通过使用定向天线,无人机可以通过绕其自身垂直轴旋转来确定朝向目标的方向。在此旋转过程中,要求无人机保持在相同位置,这引发了影响最优轨迹的运动与测量之间的权衡。
本文推导了一种用于无人机定位发射器的新型路径规划算法。通过仿真表明,与其它算法相比,该算法能在更短的时间内提供具有确定精度的定位,从而改进了当前的技术水平。该算法使用策略推演原理来执行非短视规划,并将估计过程的不确定性纳入其决策中。引入了用于策略推演的动作选择算法概念,该概念允许使用现有的优化算法来有效搜索动作空间。比较了多种动作选择算法以优化路径规划算法的速度。类似地,为减少计算需求,开发了一种基于自适应网格的定位器。
为评估该算法,构建了一个实验系统并在该系统上对算法进行了测试。基于初步实验,对路径规划算法进行了修改,包括增加与发射器的最小距离和离群值检测步骤。最终算法在实验飞行中显示出有希望的结果。
本论文涵盖了传感器管理领域,该领域融合了优化和传感器数据融合。第2章简要概述了优化技术。重点放在两个问题上:函数最小化和马尔可夫决策过程(Markov decision processes)。在函数最小化中,一个重要主题是最小化仅能获得随机样本的函数。马尔可夫决策过程是序贯决策问题,它们对于建模行动在多个决策步骤中产生影响的问题非常有用。介绍了几种求解方法,特别是本论文中使用的策略推演算法。
第3章讨论了本论文的三个重要的传感器相关基础知识。首先,介绍了传感器数据融合的贝叶斯形式主义,以及为信念不确定性建模的方法。在第二小节中,介绍了测向传感器。为测向传感器计算了第一小节中介绍的费舍尔信息(Fisher information),并描述了最优的传感器-目标几何配置。将会看到传感器-目标几何配置对定位精度的影响是显著的。最后一个小节涵盖了传感器管理,特别关注传感器路径规划。
本论文的第一个贡献在第4章中描述。在此,开发了一种用于无人机定位目标的路径规划器。与文献中的路径规划器相比,本论文的算法执行传感器路径的非短视规划,并基于当前状态估计的不确定性,考虑了不同的未来测量实现。仿真表明,该路径规划器比文献中的可比算法能更快地定位目标。
第5章对路径规划器进行了进一步改进。本章基于这样一个想法:策略推演算法中的动作选择可以解释为随机函数的最小化。比较了几种解决此任务的算法,并分析了由此产生的计算预算与性能之间的权衡。本章还表明,推演动作值的最优值与实际性能相关,从而说明了优化动作选择的重要性。
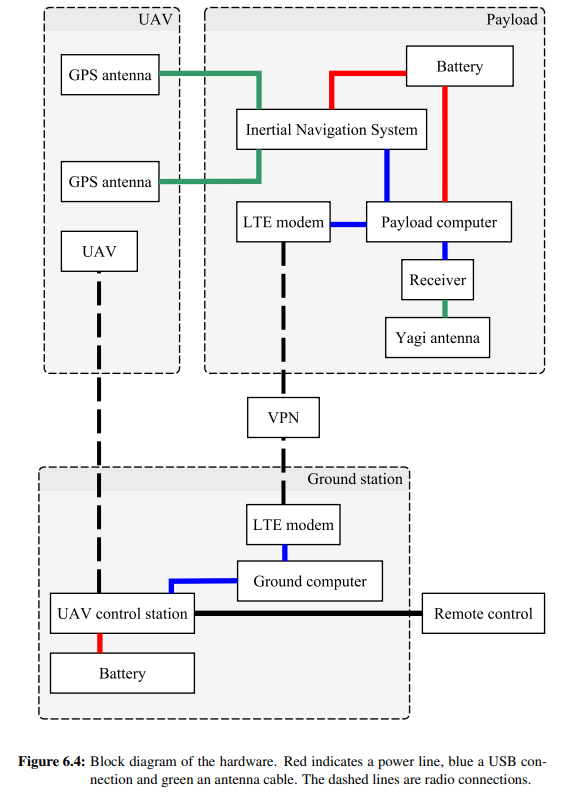
在第6章中,本论文的路径规划器在一个实验传感器系统中进行了评估。描述了该传感器系统和设置,并介绍了几项对算法必需的适应性修改。结果表明该传感器系统能够定位发射器。最后,第7章介绍了本论文的总体结论和贡献,以及这项工作的未来可能扩展。