本研究为基于人工智能的复杂作战系统的运行和开发建立了 MUM-T 概念和分类系统。分析了该系统的核心方面:自主性、互操作性和程序级别。人工智能 MUM-T 可提高有人驾驶系统的生存能力、扩大其作战范围并提高战斗力。利用美国和英国正在建造的人工智能 MUM-T 综合作战系统的数据,分析了技术挑战和项目水平。目前,MUM-T 处于有人驾驶平台和无人驾驶飞行器平台复合运行的水平。从中长期来看,无人地面飞行器、无人水面飞行器和无人水下飞行器等异构平台之间的互操作通信是可能的。根据人工智能 MUM-T 系统之间互操作性的通用架构和标准协议的发展水平,MUM-T 可以从 "1 到 N "的概念发展到从 "N 到 N "的各种操作概念组合。本研究与现有研究的不同之处在于,MUM-T 系统中体现了第四次工业革命的核心技术,如人工智能、自动驾驶和数据互操作性。此外,通过在现有的无人系统分类法中体现人工智能和自主性,建立了人工智能支持的自主 MUM-T 操作和设施分类系统,并在此基础上对级别和程序进行了分析。
本研究确立了有人无人协同作战(MUM-T)的概念,目的是操作、开发和利用智能联合作战系统。此外,它还分析了互操作性、自主性、挑战和计划水平。人工智能支持的自主无人 MUM-T 提高了有人系统的生存能力,扩大了作战范围,并显著提高了作战效率。与以往不同的是,MUM-T 的概念正随着人工智能的发展而不断扩展,互操作性和自主性也在相应提高。美国和北大西洋公约组织(NATO)国家提出了未来防御领域的挑战,并在无人系统(UMS)和 MUMT 层面开展了解决这些挑战的计划。本研究分析了自主 MUM-T 联合作战系统的运行和使用所面临的技术挑战和计划水平,并介绍了基本要素技术。研究方法基于现有定义和第四次工业革命建立了 MUM-T 概念。并利用北约、美国和英国的数据分析了互操作性、自主性、挑战以及技术和利用方面的计划水平。
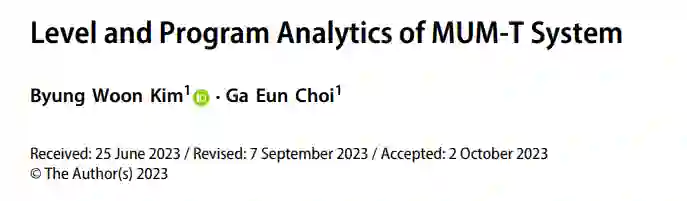
图 2 基于 NIST 和北约分类标准的人工智能自主 MUM-T 系统分析
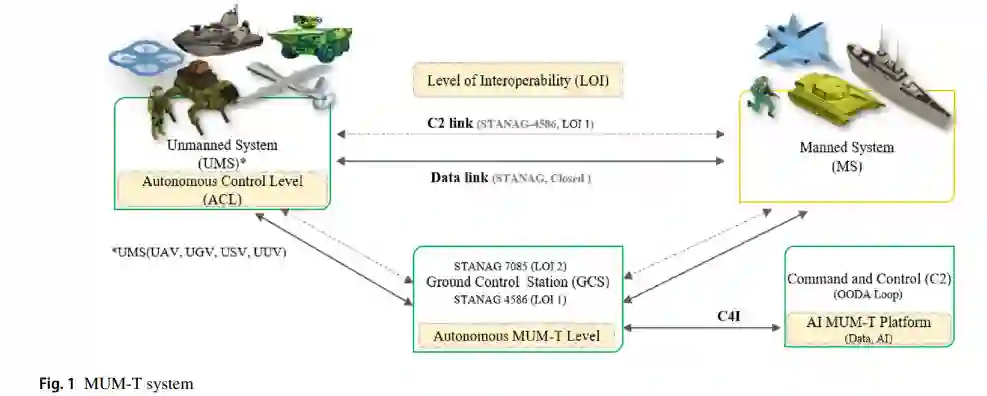
美国防部(DoD)对 MUM-T 的定义各不相同。美国 陆军无人机系统卓越中心(UAUCE)将有人驾驶平台和无人机视为单一系统。有人系统和无人系统(如机器人、传感器、无人飞行器和作战人员)的集成增强了态势感知、杀伤力和生存能力[1]。国防部将这种关系视为执行共同任务的综合团队,美国陆军航空卓越中心(UAACE)将其定义为同时操作士兵、无人机和无人地面飞行器(UGV),以提高对态势的了解和生存能力[2]。它采用了标准化的系统架构和通信协议,使来自传感器的精确图像数据能够在整个部队中共享。目前,它在国防领域的应用最为广泛。陆军航空动力局(AFDD 2015)将其定义为:为每个系统提供特殊功能,使现有有人平台和无人资产能够合作完成同一任务。这是一种规避风险的方法,通过从空中、陆地和海上无人系统向有人资产传输实时信息,提高单兵作战人员的态势感知能力[3]。图 1 是战场上 MUM-T 系统的层次示意图。
在世界经济论坛(WEF)议程的第四次工业革命(Fourth IR)之后,数字化(I2D2)作为一项核心技术被提出。这些技术在未来科学中具有自主、分析、通信和边缘计算的特点。该技术的特征组合构成了自主系统和智能体(智能+分布式)、扩展领域(互联+分布式)、作战网络(互联+数字化)、精确作战领域(智能+数字化)。智能人工智能将改变战争的格局,而数字数据的可用性将使分布式和互联(自主)系统能够进行分析、适应和响应。这些变化反过来又可能通过预测分析支持更好的决策。
北约(2020 年)以第四次工业革命的核心技术特征及其组合为导向,构建复杂的作战系统[4-6]。美国国防发展机构(ADD 2018)认为,MUM-T 复杂系统是一种无人作战系统,可以补充或替代作战人员的能力,以最大限度地提高作战效率,最大限度地减少战场情况下的人员伤亡。它被定义为以一种复杂的方式操作包括战斗人员在内的有人作战系统的作战系统[7]。考虑到美国国防部(2010)、北约(2020)和 ADD(2018)的定义,人工智能支持的自主 MUM-T 复杂作战系统(以下简称 "自主 MUM-T")和 OODA 循环如表 1 所示[1,5,7]。本研究所指的 MUM-T 复合作战系统通过联合指挥与控制,在空中、地面、海上、太空、网络和战争等所有领域提供观察、分析和控制,可通过整合/连接所有军事力量的有人和无人系统进行操作。它被定义为 "根据决策和行动执行联合行动的作战系统"。
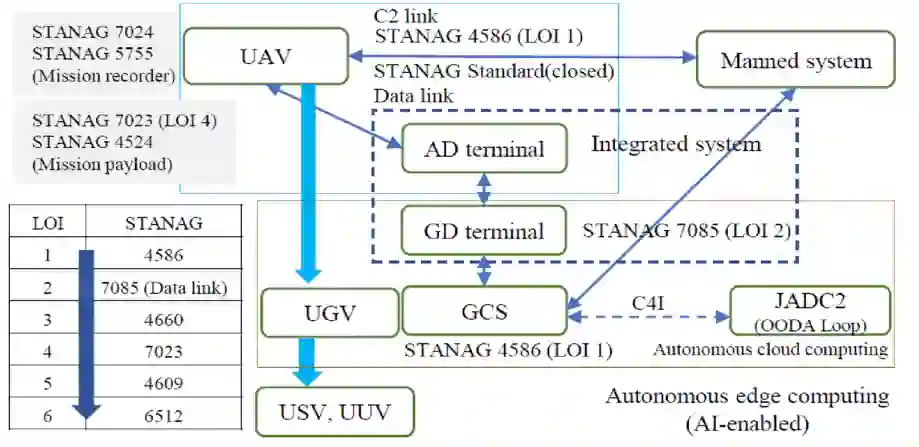
图 3 北约 STANAG LOI 5 和自主边缘计算 MUM-T 互操作水平设计