【泡泡一分钟】无人机与地面机器人协作三维建图(IROS-2)
每天一分钟,带你读遍机器人顶级会议文章
标题:3D mapping for multi hybrid robot cooperation
作者:Hartmut Surmann and Nils Berninger and Rainer Worst
来源:IROS 2017
编译:蔡纪源
播音员: 堃堃
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“3D mapping for multi hybrid robot cooperation”——无人机与地面机器人协作三维建图,该文章发表在IROS2017。
城市搜索与救援(USAR, Urban Search and Rescu)一直以来是备受关注的热点。欧盟的TRADR项目的目标是开发出新的科学和技术,能让人类与机器人协作,共同协助救灾工作并可实现多次出动。如图1所示,各种机器人与工作人员在地震后协作探索环境,采集样本。通过多个异步架构的机器人对环境持久性建模,可以提高整个团队成员对该地区工作的理解,并改善团队合作。

图1.2016年阿马特里切/意大利地震后,TRADR项目中使用的无人机与地面机器人。
本文提出了一种多机器人(UGV&UAV)协作建立一致的三维地图的新方法。在本文中,地面机器人(UGV)配有倾斜激光扫描器,无人机(UAV)配有单目相机。UAV相机数据生成的3D点云,与UGV上滚动的2D激光扫描仪生成的3D点云相融合成一个一致的地图。
本文的工作开发了一种典型的救援方案。无人机,作为第一个响应者到达灾难现场,使用图像和初始3D的点云(SFM得到)等对场景描述。人类和地面机器人可以使用这些信息进行自身初始定位。另一方面,地面机器人提供的传感器数据相对稳定,能包含足够的信息进行运动估计。最终的3D地图结合了无人机和地面机器人各自传感器的信息,因此具有更高的信息内容。
配准方法是基于从点云提取的相关平面分割段进行匹配。提出的MUMC (Minimally Uncertain Maximum Consensus) 方法,以最大化几何一致性、最小化结果不确定性为目标。
基于配准方法,作者还提出一种全局最优的定位方法,且仅需点云的结构信息便能实现定位,算法原理流程图如下。
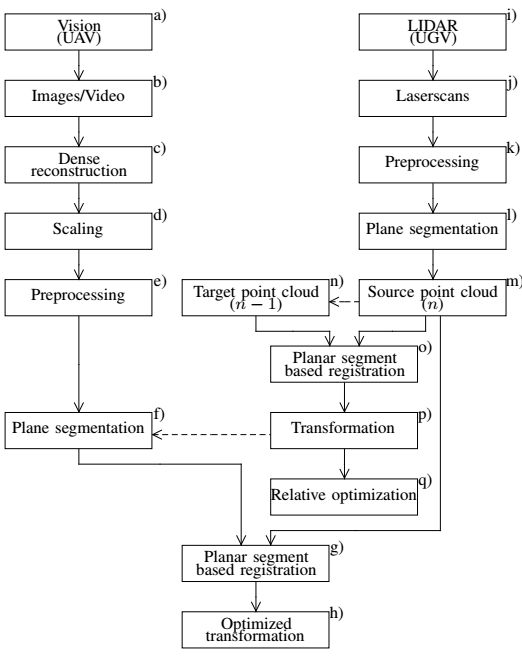
图2.本文提出的定位方法流程图。
最后, 两个实验例子充分显示了整个配准算法、相对定位算法和全局最优定位算法的性能是十分优秀的。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
回复关键字“UAVUGV”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




