终于开源!基于Overlap的激光雷达全局定位算法!
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
今天介绍的是德国波恩大学StachnissLab的Xieyuanli Chen最新的开源算法。此前我们曾经报导过他之前的工作:
IROS2019 |新开源SuMa++:语义激光雷达SLAM可靠过滤动态物体
代码开源!激光雷达 SLAM 的闭环检测:OverlapNet
本次介绍的论文题目:
Learning an Overlap-based Observation Model for 3D LIDAR Localization
作者:
Xieyuanli Chen,德国波恩大学StachnissLab
代码开源地址:
https://github.com/PRBonn/overlap_localization
先来看下作者的3分钟视频讲解了解一下
下面是11分钟详细细节介绍:
简介
文章使用了OverlapNet作为蒙特卡洛定位算法(MCL)的观测模型,实现了基于激光雷达传感器的高精度全局定位。目前MCL最大的难题就是如何去设计一个好的观测模型。文章的创新点是利用OverlapNet来训练了一个观测模型,然后把它集成到MCL中,提高了MCL的定位性能。
什么是MCL?
MCL包含了两个部分,跟所有的传统的贝叶斯模型一样,包含了预测部分:运动模型(motion model)和更正部分:观测模型(observation model)。不同的是,MCL利用了粒子滤波对运动模型进行采样,每个粒子可以当作对当前位姿的假设(hypothesis)。使用粒子滤波的好处是可以对整个空间进行采样,MCL可以在不知道初始位置的情况下,对多个假设进行跟踪,最后通过连续不断的观测和纠正,选择出正确的位姿估计,实现全局定位,使整个算法更加鲁棒。
运动模型:利用上一个位姿xt-1,以及当前里程计的信息ut,对每个粒子j在当前时刻的位姿xt进行预测。
观测模型:在给定当前粒子的位置xt和地图m,利用当前的观测zt来调整每个粒子j的权值,最后对整个位姿后验进行更新。

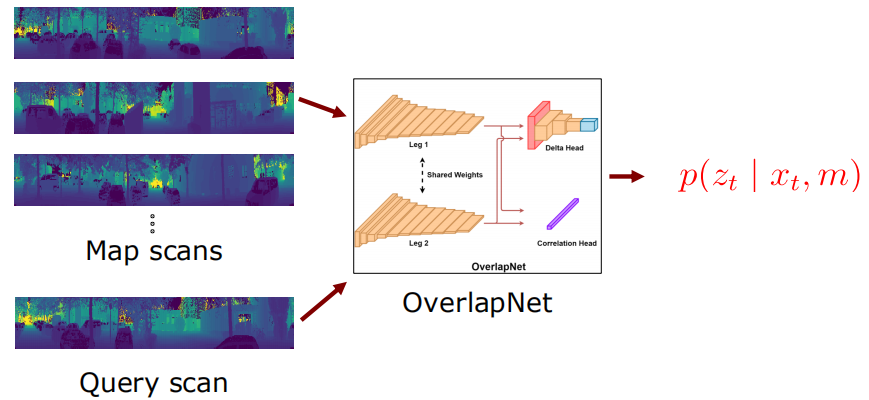
图为基于Overlap的观测模型:
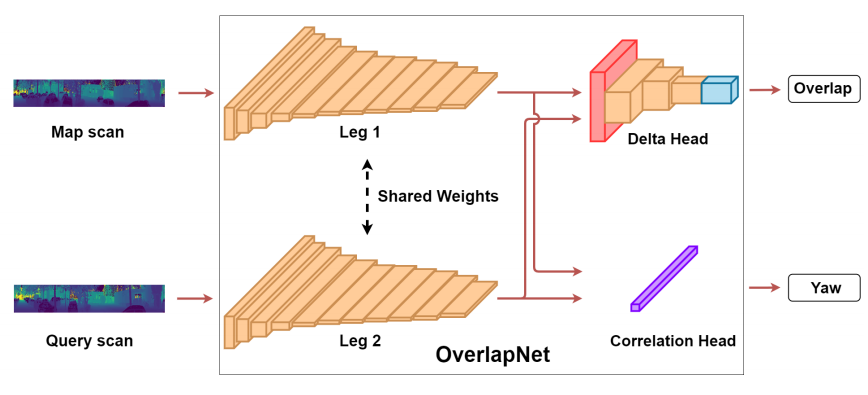
此模型利用作者之前提出的OverlapNet,将当前激光雷达传感器的观测(query scan),和从地图中所渲染生成的虚拟的观测(map scan)作为网络输入。利用网络对两个观测之间的Overlap和Yaw的预测值来更新粒子权值。
如何使用Overlap传感器模型更新粒子的权值?
本文利用当前帧和地图帧之间的Overlap和Yaw的预测值对粒子的权值进行更新。区别于传统的传感器模型,本文对状态变量(x, y, theta)进行分解,利用Overlap预测值作为位置(x, y)的似然估计,Yaw预测作为偏航角(theta)的似然估计。然后对观测模型进行解耦。针对每一个粒子假设的位置和偏航,分别计算权重。
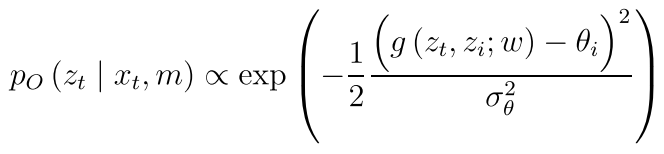
在计算位置的似然时,直接使用Overlap的估计值,因为它本身即是值为0到1的概率估计。在计算偏航的似然估计时,使用高斯模型进行估计。最后将两者结合起来,对粒子的权值进行更新。过程如下:


下图展示了实验过程中使用的全局地图,蓝线表示曾经去过的地方。

取一小块区域做示例,本文所提出的算法首先对整个环境进行栅格化,然后对每个栅格从环境模型中渲染出虚拟的range image,存储到地图中。图中取了3个粒子。根据每个粒子的位置,赋予它们相应虚拟的地图帧。
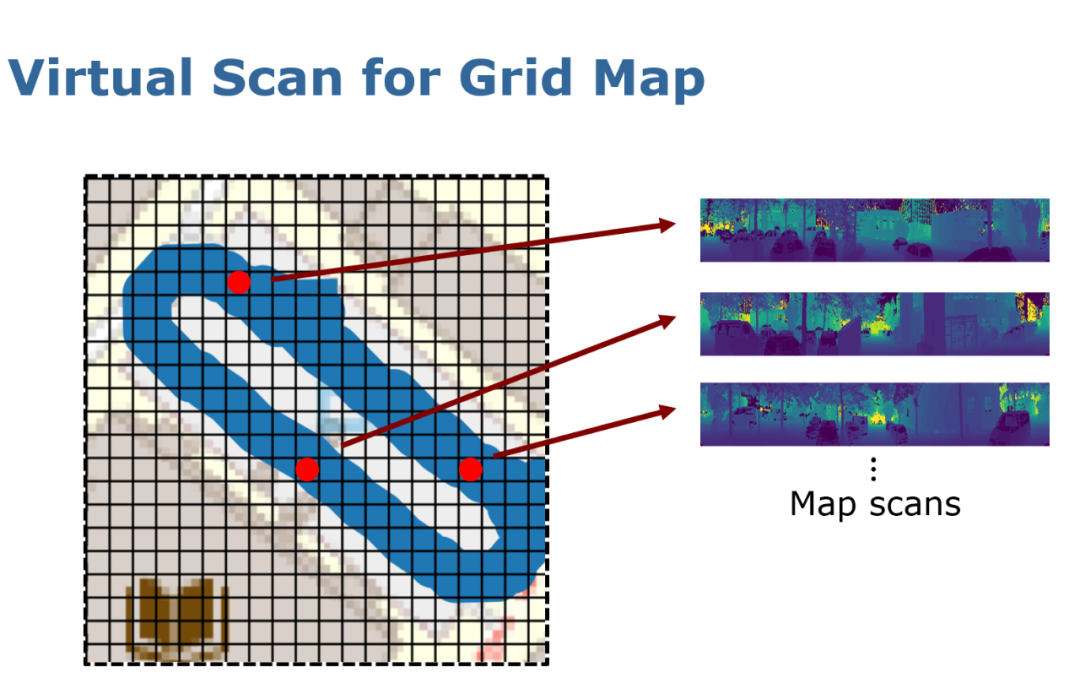
然后将当前帧(Query scan)和每个粒子的地图帧进行比较,即将它们作为OverlapNet的输入,得到输出后通过之前介绍的分解观测模型,对每个粒子的权值进行更新,最后将观测模型结合到MCL的定位中,从而实现全局定位。
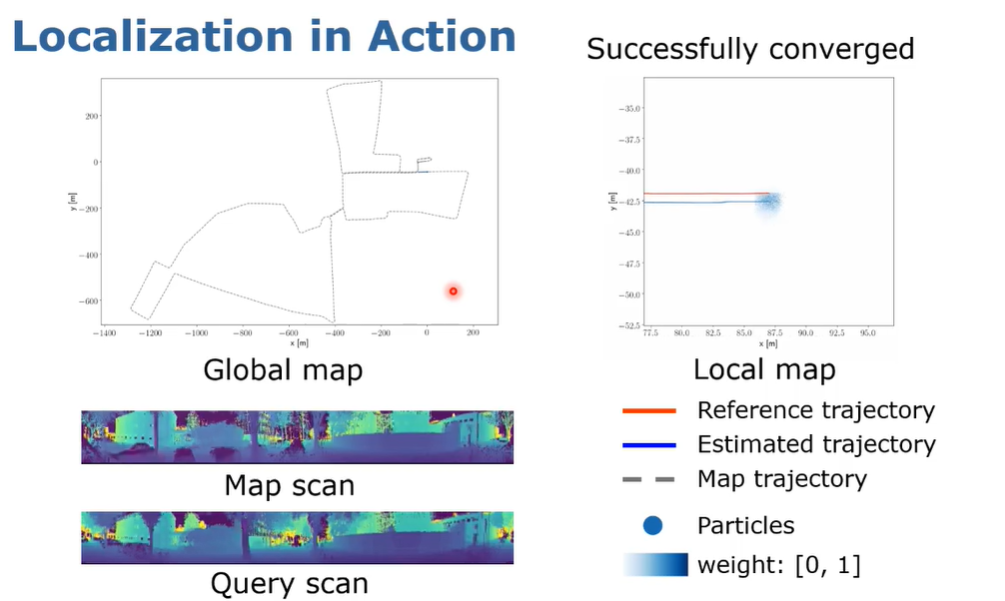
下图为整个系统的运行结果。左上角是全局定位的结果,首先对整个地图进行初始化采样,在很短的时间内,所有的粒子群可以收敛到正确的位置。右上角是局部跟踪的结果。左下角是当前帧和所估计出来的位姿所对应的地图帧。
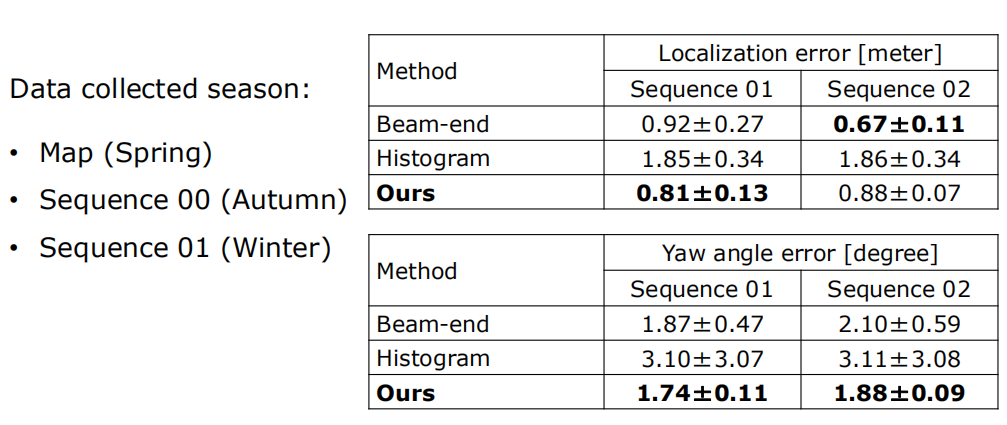
最后展示的定量比较的结果,显示了文章算法的泛化能力。地图是在春天进行采集的,测试定位所用的数据集是在秋天和冬天进行采集的。可以看出文章的算法优于传统的算法的性能。
总结
1. 提出了新的基于深度学习的观测模型可用于实现基于激光雷达的全局。
2. 提出的算法具有好的泛化能力。
3. 将提出的模型集成到MCL中,定位系统能够很好的实现全局高精度定位。
从0到1学习SLAM,戳↓

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓




