自学习 AI 智能体第二部分:深度 Q 学习

本文为 AI 研习社编译的技术博客,原标题 :
Self Learning AI-Agents Part II: Deep Q-Learning
翻译 | 老赵 校对 | 酱番梨 整理 | 菠萝妹
原文链接:
https://towardsdatascience.com/self-learning-ai-agents-part-ii-deep-q-learning-b5ac60c3f47
注:本文的相关链接请点击文末【阅读原文】进行访问
深度学习的数学指导。 在关于深度强化学习的多系列的第二部分中,我将向你介绍 AI 主体如何学习在具有离散动作空间的环境中表示的有效方法。

自学习 AI 主体系列 - 目录
第一部分:马尔可夫决策过程
第二部分:深度Q学习(本文)
第三部分:深入(双重)Q-Learning
第四部分:继续行动空间的策略梯度
第五部分:决斗网络
第六部分:异步动作 - 批评主体
深度 Q-Learning - 目录
0. 简介
1. 时间差异学习
2. Q-Learning
2.1 开关策略
2.2 贪心策略
3. 深入的Q-Learning
3.1 目标和Q网络
3.2 ε-贪心策略
3.3 探索/开发困境
3.4 体验重放
4. 体验重放伪算法的深度Q学习
0. 简介
在本系列的第一篇文章中,介绍了马尔可夫决策过程的概念,它是深度强化学习的基础。为了完全理解以下主题,建议回顾第一篇文章。
通过深度 Q 学习,我们编写可以在具有离散动作空间的环境中运行的 AI 主体。 离散动作空间指的是明确定义的动作,例如, 向左或向右,向上或向下移动。
图1. Atari的突破作为离散动作空间的一个例子。
Atari的突破是具有离散动作空间的环境的典型示例。 AI 主体可以向左或向右移动。 每个方向的运动都以一定的速度发生。
如果主体可以确定速度,那么我们将拥有一个具有无限可能动作的持续动作空间(具有不同速度的运动)。 将来会考虑这个案例。
动作价值函数
在上一篇文章中,我介绍了由等式1给出的动作价值函数 Q(s,a)的概念。作为提醒,动作价值函数被定义为 AI 主体通过从状态 s 开始,采取动作 a 然后遵循策略 π 而获得的预期回报。
注意:直观地说,策略 π 可以被描述为主体根据当前状态选择某些动作的策略。

等式1. 动作价值函数
Q(s,a)告诉主体在特定状态 s 中可能的动作 a 的值(或质量)。 给定状态 s,动作价值函数计算该状态下每个可能动作 a_i 的质量/值作为标量值(图1)。 更高的质量意味着在给定目标方面采取更好的行动。
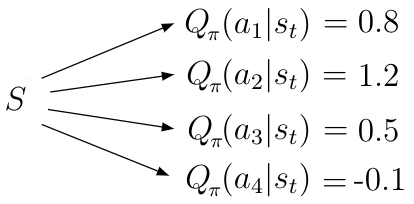
图1 给定状态 s,Q(s,a)有很多动作和适当的值
如果在等式1中执行期望运算符 E,在处理概率时我们可以获得一种新形式的动作价值函数。 Pss' 是从状态 s 到下一个状态 s' 的转换概率,由环境决定。 π(s'| a')是策略或数学上讲给定状态s的所有动作的分布。

等式2 Q(s,a)包含概率的另一形式
1.时间差异学习
深度 Q 学习的目标是解决动作价值函数 Q(s,a)。 我们为什么要这样? 如果 AI 主体知道 Q(s,a),那么给定目标(比如赢得国际象棋比赛与人类玩家或玩Atari的突破)可以被视为已经解决。 其原因在于,Q(s,a)的知识将使主体能够确定在任意给定状态下任何可能动作的质量。 因此,主体可以相应地表示。

等式2给出了一个递归解决方案,可用于计算Q(s,a)。 但是,由于我们正在考虑递归并且使用该等式处理概率是不实际的。 相反,我们必须使用所谓的时间差(TD)学习算法来迭代地求解Q(s,a)。
在时间差学习中,我们将状态 s 中的每个动作 a 的 Q(s,a)更新为估计的返回 R(t + 1)+γQ(s(t + 1),a(t + 1))(等式3))。 返回估计也称为TD-目标。 对每个状态 s 和动作 a 迭代地执行此更新规则,在环境中的任何状态 - 动作对产生正确的动作价值Q(s,a)。

等式3 Q(s,a)更新规则
TD-Learning算法可以通过以下步骤进行总结:
计算状态s_t中动作a_t的Q(s_t,a_t)
转到下一个状态s_(t + 1),在那里执行动作a(t + 1)并计算值Q(s_(t + 1),a(t + 1))
使用Q(s_(t + 1),a(t + 1))和立即奖励R(t + 1)用于最后状态s_t中的动作a_t来计算TD目标
通过将Q(s_t,a_t)添加到TD目标和Q(s_t,a_t)之间的差值来更新先前的Q(s_t,a_t),α是学习速率。
1.1 时间差异
让我们更详细地讨论TD算法的概念。 在TD学习中,我们考虑Q(s,a)的“时间差异” - Q(s,a)的两个“版本”之间的差异,在我们在状态 s 中执行动作 a 之前和之后的时间之间分隔一次。
采取动作之前:
图2. 假设 AI 主体处于状态 s(蓝色箭头)。 在状态 s 中,可以采取两种不同的动作 a_1 和 a_2。 基于来自先前时间步骤的计算,主体知道在该状态下两个可能动作的动作价值Q(s,a_1)和Q(s,a_2)。
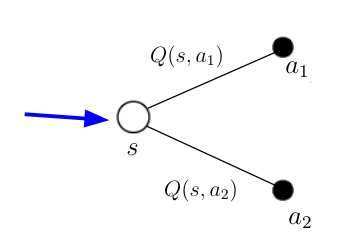
图2 状态 s 中的主体知道每个可能的Q(s,a)
采取动作之后:
根据这些知识,主体决定采取动作 a_1。 采取此行动后,主体处于下一个状态 s'。 为了采取行动 a_1,他收到了直接奖励 R。在状态 s' 中,主体可以再次采取两个可能的行动 a'_1 和 a'_2,他们从之前的一些计算中再次知道行动价值。
如果你看方程式1中Q(s,a)的定义。你会发现在状态 s' 我们现在有了新的信息,可以用它来计算Q(s,a_1)的新值。 该信息是针对最后状态中的最后一个动作接收的直接奖励 R 以及主体将在该新状态中采取的动作 a' 的Q(s',a')。 Q(s,a_1)的新值可以根据图3中的等式计算。等式的右边也是我们称之为TD目标。 TD目标与Q(s,a_1)的旧值或“时间版本”之间的差异称为时间差。
注意:在TD学习期间,我们计算任何可能的动作值Q(s,a)的时间差异,并使用它们同时更新Q(s,a),直到Q(s,a)收敛到它为真值。
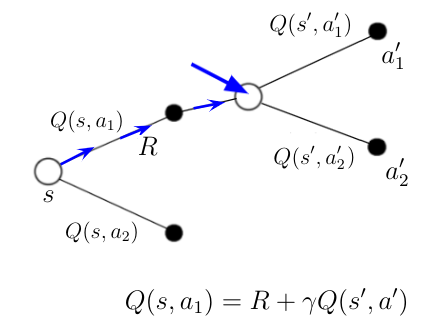
图3 主体在状态 s' 中采取动作 a_1
1.2 SARSA
应用于Q(s,a)的TD学习算法通常称为 SARSA 算法(状态-动作-奖励-状态-动作)。 SARSA是一种称为在策略的特殊学习算法的好例子。
之前介绍策略π(a | s)作为从状态s到动作a的映射。 此时你应该记住的一件事是,在策略算法使用相同的策略在TD目标t中来获取Q(s_t,a_t)的动作以及Q的动作(s(t + 1),a_(t + 1) ))。 这意味着我们正在同时遵循和改进相同的策略。
2. Q学习
我们终于到达了文章的核心,我们将讨论 Q 学习的概念。 但在之前我们必须看一下被称为离策略的第二种特殊算法。 你可能认为Q学习已经属于这种算法,这与SARSA在策略算法有所区别。
要了解离策略算法,我们必须引入另一个策略μ(a | s)并将其称为行为策略。 行为策略确定针对所有t的Q(s_t,a_t)的动作a_t~μ(a | s)。 就SARSA而言,行为策略将是我们遵循的策略,并在同时尝试进行优化。
在离策略算法中,我们有两个不同的策略μ(a | s)和π(a | s),μ(a | s)是行为,π(a | s)是所谓的目标策略。 当行为策略用于计算Q(s_t,a_t)时,目标策略仅用于在TD目标中计算Q(s_t,a_t)(这个概念在下一节中会更全面,在那里进行实际计算)。
注意:行为策略选择所有Q(s,a)的行动。 相反,目标策略仅确定用于计算TD目标的动作。
我们实际上称之为 Q 学习的算法是一种特殊情况,其中目标策略π(a | s)对于 Q(s,a)是贪心的,这意味着我们的策略是采取导致Q值最高的行动。这产生了以下目标策略:
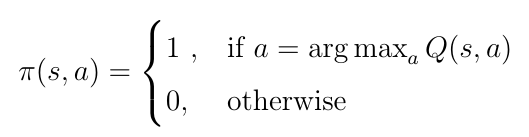
等式4 对于 Q(s,a)得贪心目标策略
在这种情况下,目标策略称为贪心策略。 贪心策略意味着我们只挑选导致Q(s,a)值最高的行动。 其中我们遵循随机策略π(a | s)之前,这个贪心的目标策略可以插入到动作值Q(s,a)的等式中:
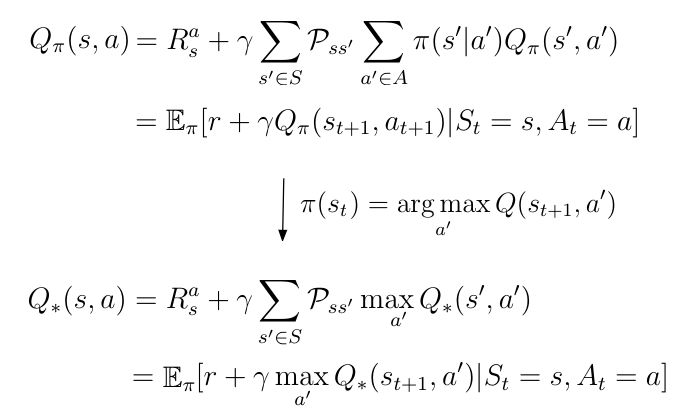
等式5 将贪心策略插入Q(s,a)
贪心策略为我们提供了最佳的动作值Q *(s,a),因为根据定义,Q *(s,a)是Q(s,a),它遵循最大化动作值的策略:

等式6 最优Q(s,a)的定义
等式5中的最后一行只不过我们在上一篇文章中得出的Bellman最优性方程。 该等式用作递归更新规则以估计最佳动作值函数Q *(s,a)。
然而,TD学习仍然是找到Q *(s,a)的最佳方式。 使用贪心目标策略,等式3中Q(s,a)的TD学习更新步骤变得更加简单,如下所示:

等式7 贪心策略的TD学习更新规则
具有贪心目标策略的Q(s,a)的TD学习算法可归纳为以下步骤:
计算状态 s_t 中动作 a_t 的Q(s_t,a_t)
转到下一个状态s_(t + 1),采取行动 a' 导致Q值最高并计算Q(s_(t + 1),a')
使用Q(s_(t + 1),a')和最后状态 s_t 中的动作 a_t 的立即奖励R来计算TD目标
通过将Q(s_t,a_t)添加到TD目标和Q(s_t,a_t)之间的差值来更新先前的Q(s_t,a_t),α是学习速率。
考虑前面的图(图3),其中主体在状态 s' 中并且知道该状态中可能的动作的动作值。 遵循贪心目标策略,主体将采取具有最高动作值的动作(图4中的蓝色路径)。 该策略还为Q(s,a_1)(图中的等式)提供了新值,根据定义,它是TD目标。
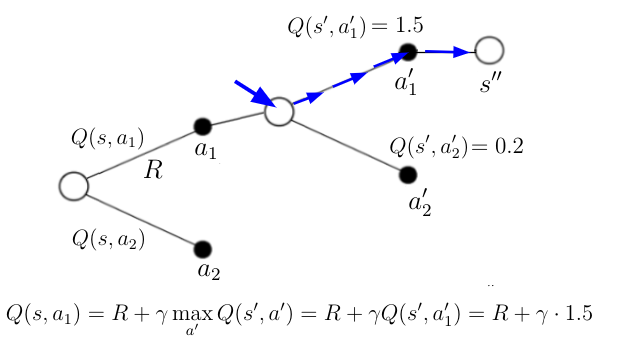
等式8 根据贪心策略计算Q(s,a_1)
3. 深度Q学习
我们终于到达了这篇文章的标题 - 我们最终使用深度学习。 如果查看Q(s,a)的更新规则,你可能会发现如果TD目标和Q(s,a)具有相同的值,我们不会获得任何更新。 在这种情况下,Q(s,a)收敛到真实的行动值并实现目标。
这意味着我们的目标是最小化TD目标和Q(s,a)之间的距离,这可以用平方误差损失函数(公式10)表示。 通过通常的梯度下降算法可以实现这种损失函数的最小化。

等式10 平方误差损失函数
3.1 目标和Q网络
在深度Q学习TD目标中,y_i和Q(s,a)由两个不同的神经网络分别估计,这两个神经网络通常被称为目标和Q网络(图4)。 目标网络的参数θ(i-1)(权重,偏差)对应于较早时间点的Q网络的参数θ(i)。 这意味着目标网络参数会及时冻结。 它们在使用Q网络的参数进行n次迭代后得到更新。
注意:给定当前状态s,Q网络计算动作值Q(s,a)。 同时,目标网络使用下一个状态s'来计算TD目标的Q(s',a)。
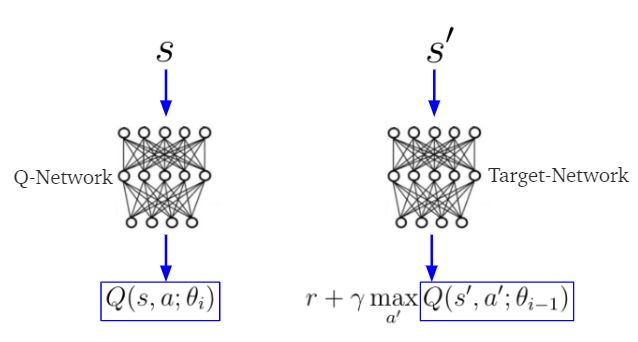
图4目标和Q网络。 s是当前状态,s'的下一个状态。
研究表明,使用两种不同的神经网络进行TD目标t和Q(s,a)计算可以使模型具有更好的稳定性。
3.2 ε-贪心策略
当目标策略π(a | s)仍然是贪心策略时,行为策略μ(a | s)确定AI主体所采取的动作a_i,因此Q(s,a_i)(由Q网络计算)必须被插入平方误差损失函数。
行为策略通常被选为ε- 贪心策略。 利用ε-贪心策略,主体在每个时间步骤选择具有固定概率 ε 的随机动作。 如果 ε 的值高于随机生成的数字 p,0≤p≤1,则AI主体从动作空间中选择随机动作。 否则,根据倾斜的动作值Q(s,a)贪婪地选择动作:
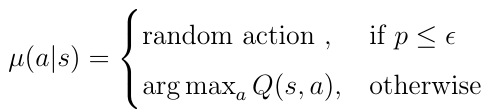
等式11 ε-贪心策略的定义
选择ε- 贪心策略作为行为策略μ解决了探索/开发的两难选择。
3.3 探索/开发
关于采取哪些行动的决策涉及一个基本选择:
开发:根据当前信息做出最佳决策
探索:收集更多信息,探索可能的新途径
在利用方面,主体根据行为策略 μ 采取最佳行动。 但这可能会导致问题。 也许有时会有另一种(替代)行动可以通过状态序列在更好的路径中产生(长期),但如果我们遵循行为策略,则可能不采取这种替代行动。 在这种情况下,我们利用当前的策略,但不会探索其他替代行动。
ε-贪心策略通过允许AI主体以特定概率ε从动作空间中采取随机动作来解决该问题。 这称为探索。 通常,ε的值随着时间的推移而降低,根据等式12,这里n是迭代次数。 减少ε意味着在培训开始时我们尝试探索更多的替代路径,而最终,我们让策略决定采取哪些行动。
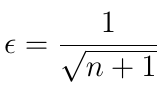
等式12 随着时间的推移减少ε
3.4 体验重放
在过去,可以证明,如果深度Q学习模型实现经验重放,则估计TD目标和Q(s,a)的神经网络方法变得更加稳定。 体验重放只不过是存储
s:AI主体的状态
a':主体在状态内 s 采取的行动
r:在状态 s 对应动作 a'收到的立即奖励
s':状态s后主体的下一个状态
在训练神经网络时,我们通常不使用最新的
3.5 体验重放伪算法的深度Q学习
以下伪算法实现了具有体验重放的深度 Q 学习。 我们之前讨论过的所有主题都以正确的顺序包含在此算法中,具体如何在代码中实现。
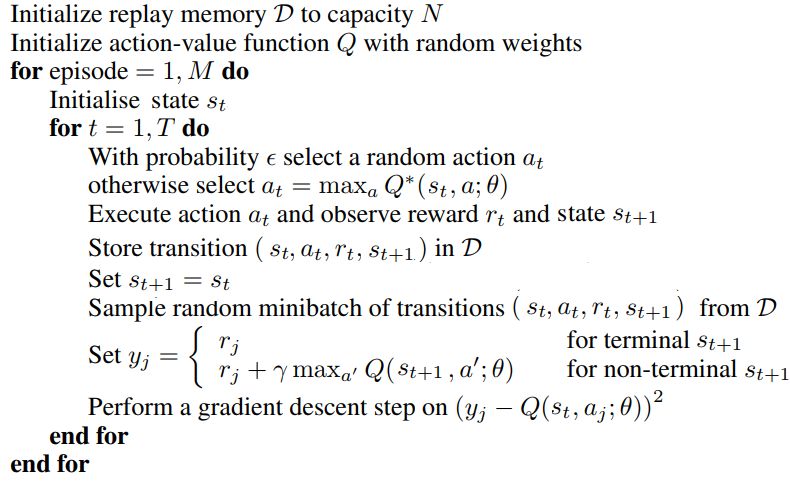
体验重放深度 Q 学习的伪算法
想要继续查看该篇文章相关链接和参考文献?
戳链接或点击底部【阅读原文】:
http://ai.yanxishe.com/page/TextTranslation/1180
AI研习社每日更新精彩内容,观看更多精彩内容:
使用 SKIL 和 YOLO 构建产品级目标检测系统
AI课程/书籍/视频讲座/论文精选大列表
Excel 还能这样玩?轻松搞懂一维 & 三维卷积神经网络
数据科学家应当了解的五个统计基本概念:统计特征、概率分布、降维、过采样/欠采样、贝叶斯统计
等你来译:


