【泡泡一分钟】利用连续同形和惯性数据观测平面目标的相机姿态、线速度和深度估计
每天一分钟,带你读遍机器人顶级会议文章
标题:Attitude, Linear Velocity and Depth Estimation of a Camera observing a planar target using continuous homography and inertial data
作者:Minh-Duc Hua, Ninad Manerikar, Tarek Hamel, Claude Samson
来源:2018 IEEE International Conference on Robotics and Automation (ICRA)
编译:王丹
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文讨论了IMU-相机对平面目标姿态、线速度和深度的估计问题。考虑的解决方案依赖于光流追踪(从连续同形图中提取),并辅以陀螺和加速度计测量。提出了一种确定性观测器,并对该观测器进行了可观测性分析,指出了摄像机的运动激励条件,其满足度使观测器的稳定性和估计误差的收敛性为零。通过对IMU-相机系统进行实验测试,说明了观测器的性能。
与大多数关于同一问题的现有著作相比,本文讨论了观测量依赖于指数稳定性和收敛性的结构可观测性问题,并基于摄像机IMU线性速度所给予的激励的持续性,推导了一个显式(简单)可观测性条件。讨论了几种实用的算法和实现问题。
本论文的组织结构如下:
在第二节中,规定符号、系统方程和观测器设计中涉及的测量,同时,回顾了关于一致可观测性的一些基本定义和条件,以及文献[8]中提出的确定性Riccati观测器设计框架的要素。
在第三节中,指定了建议的观察量,并对相关的可观测性条件进行了分析。
第四节中,描述了该观察量的实际实施方面。
第五节中,说明了其性能的实验结果。
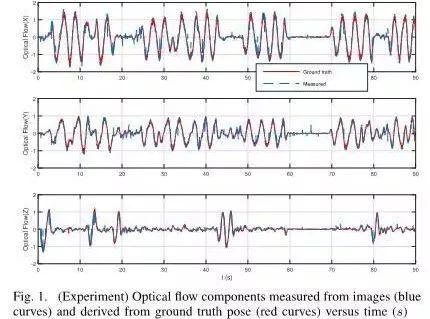
图1.(实验)从图像中测量的光流分量(蓝色线)和真实值(红色线)对比
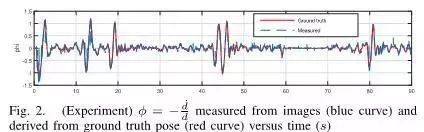
图2.估计值与真实值对比
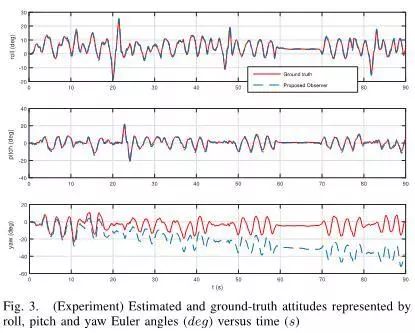
图3.估计值与真实值在翻滚角、俯仰角、偏航角上的对比
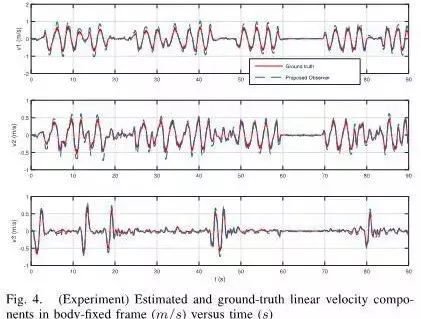
图4.估计值与真实值在线速度上的对比
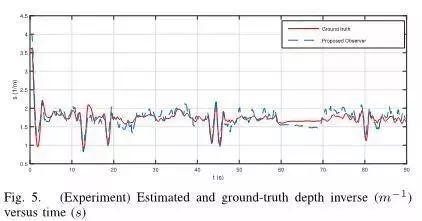
图5.估计值与真实值在逆深度上的对比

Abstract
This paper revisits the problem of estimating the attitude, linear velocity and depth of an IMU-Camera with respect to a planar target. The considered solution relies on the measurement of the optical flow (extracted from the continuous homography) complemented with gyrometer and accelerometer measurements. The proposed deterministic observer is accompanied with an observability analysis that points out camera’s motion excitation conditions whose satisfaction grants stability of the observer and convergence of the estimation errors to zero. The performance of the observer is illustrated by performing experiments on a test-bed IMU-Camera system.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:ahue
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



