海洋技术丨超短基线定位技术及在海洋工程中的应用
随着科学技术的飞速发展和对自然的不断探索,人类的足迹向着更深更远的方向延伸。在天空,人们不断突破速度的极限,并且向着宇宙深处不断进发;在水下,人们不断挑战着下潜的极限,打开未知海洋世界的大门。但无论上天还是下海,都需要导航定位来提供位置、姿态信息。然而人们对海洋探索的步伐远不及对天空的认知,最主要的原因就是电磁波信号在海水这种高导电介质中衰减严重,而且频率越高,衰减越严重。例如频率为3~30kHz的甚长波在海水中传输的深度也仅能达到20m。因此,尽管卫星导航系统可为不限量的用户全天候地提供三维定位、定时和速度测量,定位精度很高,但是水下航行器只有上浮接近水面才能获取卫星导航系统或其他无线电导航系统的导航信息,如果航行器在水面以下相当深处航行,到水面就需要很多时间和能耗。上述缺点限制了卫星导航系统或其他无线电导航系统在水下航行器中的应用。此外,尽管最新的研究表明,蓝绿激光在水下吸收率低,穿透性强,美国也成功进行了卫星-潜艇激光通信试验,但激光通信单点传输,广播效果差,对接难度高,因此在水下定位导航领域依旧以惯性导航、地球物理场导航和声学导航为主。
目前已有的定位技术中,惯性导航系统(INS)因其隐蔽性强和自主性特点,在水下航行器中得到广泛应用。虽然惯导技术本身已日渐成熟,但惯导系统定位误差随时间积累需要定期重调的特性却从未改变,因此,伴随惯导技术发展的同时,世界各国都一直在探索惯导系统的校准方法。多普勒声呐系统自主性好、反应快、抗干扰性好、测速精度高,特别适合在水下航行器上应用,然而目前的多普勒声呐导航通常采用航位推算的方法确定机体位置,定位精度较低。地球物理导航是基于地球物理参数,如地磁、重力场、地形等在空间分布上的变化,并与先验的环境测绘图进行匹配,从而实现导航目的。这就带来2个主要问题,生成先验测绘图的难度以及随维数增加匹配计算的复杂度。
声波在水下传播特性良好,作用范围广,一般的中高频水声信号的作用范围都在千米级别,低频水声信号传播距离可以高达10km以上。水声定位导航系统因其简单可靠、灵活多变等特点,是检验和鉴定水下航行器性能的主要手段。声学定位方法按照接收基阵的尺寸或应答器基阵的基线长度来分类,水声定位系统可以分为长基线(LBL)、短基线(SBL)和超短基线(USBL)三种。上述三种声学基线定位系统具有各自的优势和特点,长基线和短基线水声定位系统需要分别在海床和船体上安装固定接收基阵,超短基线水声定位系统则将水听器组件装在一个精密的容器里,并且基线长度在厘米范围。相对而言,超短基线定位技术更具有便携性和独立性,因此成为水声定位设备发展的热点。
本文将对水下声学定位技术,尤其是超短基线定位技术进行说明和比较,然后主要对超短基线定位系统当前的发展状况进行描述,再对超短基线定位技术在海洋工程中的应用进行介绍,最后对超短基线定位技术的发展方向进行展望。
水声定位主要是通过水声信号测量声源与应答器基阵间的距离进行定位,基阵中基元间的距离称为基线,因此根据基线长度不同,水声定位主要分为长基线、短基线和超短基线三种(表1)。
表1 水声定位系统分类
系统类型 |
长基线(LBL) |
短基线(SBL) |
超短基线(USBL) |
基线 |
100~6000m |
1~50m |
<1m |
特点 |
基元空间分布较广 |
基元布放于船体各处 |
基元集中于较小的独立单元 |
优点 |
定位精度高;探测范围广 |
精度较高;无需重复校正 |
体积小,方便携带和安装 |
缺点 |
基阵布放工作量大 |
基元固定,船体噪声影响大 |
作用距离小,精度低 |
适用对象 |
区域内高精度定位 |
无信标环境高精度定位 |
低成本便携式潜航器 |
⒈长基线定位系统
长基线定位系统的基阵一般由多个应答器分布于水下。从基线长度方面理解,认为长基线定位系统(图1)指的是基线长度可以与海深相比拟的定位系统。每个应答器可以获得一个斜距,在应答器位置预先确定的条件下,根据球面交汇原理可以确定目标的位置。此外,还有一种根据基元间时间差的方式也可以获得目标位置,这种方法突破了时间同步的限制。
长基线定位系统因其基线较长,所以定位精度很高。但是在深水使用时,位置数据更新率较低,仅达到分钟量级。其次,布放、校准以及回收需要较长时间,且作业过程较为复杂。
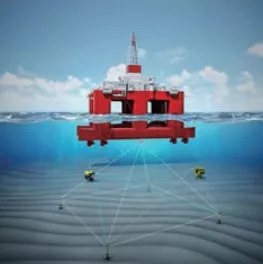
图1 长基线定位系统
⒉短基线定位系统
短基线定位系统(图2)的基阵基元通常安放在整个船体上,基线长度不超过船体尺寸,由于基线长度不及长基线基阵,因此定位精度也逊色于长基线系统,但要优于常规超短基线系统。相比于长基线复杂的应答器校准过程,短基线的基阵一旦安装校正完成,定位导航作业就较为方便。然而短基线定位系统的缺点也比较突出,首先一般在舰船建造时就确定水听器基元的安装位置,一旦确定就不便于更改;其次,安装位置难免会受到螺旋桨等机械噪声的干扰,影响定位性能;最后,船体的形变对于高精度定位也会带来一定的误差。

图2 短基线定位系统
⒊超短基线定位系统
超短基线定位系统(图3)提供的定位精度往往不及前两种。这是因为它只有一个紧凑的尺寸很小的声基阵安装在载体上。基阵作为一个整体单元,可以使其处在流噪声和结构噪声均较弱的某个有利位置。此外,它也无需布放浮标和应答器阵。但是通过精细设计,超短基线系统的定位精度有望能够接近长基线系统的定位精度。

图3 超短基线定位系统
上述各种定位系统既可单独使用,也可以有机地组合,构成组合系统。组合系统可提供可靠的位置冗余,并发挥各个系统的优点。例如,可组合成长/超短基线系统(L/USBL)、长/短基线系统(L/SBL)、以及长/短/超短基线系统(L/S/USBL)等。
⒈系统组成
超短基线定位系统要确定目标的绝对位置,首先要知道声基阵的位置、姿态以及船艏方向,这些参数可以由GPS、运动传感器(MRU)和电罗经提供(图4)。然后是确定目标在声头坐标系中的位置。除了这些外部设备外,超短基线定位系统还由载体端的声头部分和水下的应答器组成。声头包含一个收发换能器和水听器基阵。水听器基阵的尺寸非常小,只有几厘米至几十厘米。因此声头可以安装在船体水面以下任何位置,较为方便灵活。声头和应答器可以通过询问和应答方式测量往返时间,也可以由电缆连接测量单程时间。
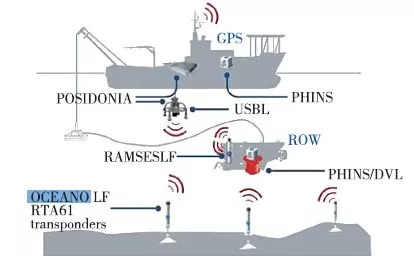
图4 水下定位系统整体组成示意图
在硬件结构上,声头部分主要由收发模块、控制模块、计算模块和显示模块组成。应答器部分只需要收发模块和控制模块即可,如图5所示。
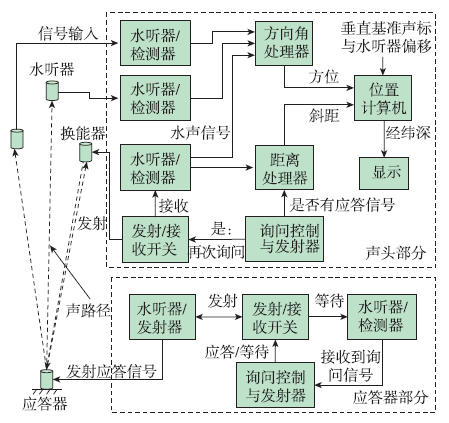
图5 超短基线系统硬件结构
⒉定位原理
组成超短基线最少需要3个水听器,其中一个作为参考单元。若3个水听器位于2个相互垂直的基线上(x和y轴上),假设各方向上基元间距(基线)均为d,应答器发出的信号到基阵原点的声线与x轴及y轴的夹角分别为θmx和θmy(图6)。
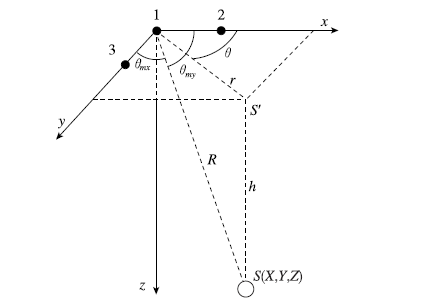
图6 目标的距离与方位
以测量往返时间为例,斜距R为:
R=0.5cT ⑴
其中,c为声波在水中的速度,约为1500m/s,T为往返时间。
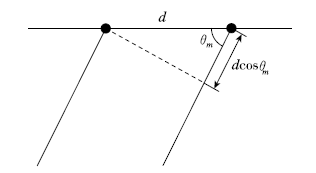
图7 两接收器间的相位差
由于相对基元与应答器的距离,基阵尺寸极小,可认为入射到所有基元的声线平行。当信号频率为f0,即波长λ=c/f0 时,由图7可知,2个水听器接收信号的相位差ϕ与信号入射角θm的关系为:
φ=(2πd/λ)cosθm ⑵
则应答器S在声头坐标系中的位置为:
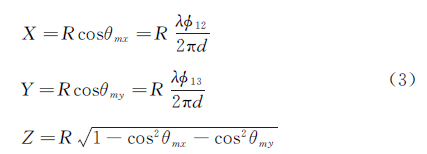
由于水平误差累计在垂直角计算过程中,因此高度方向误差较大,为了提高垂直角的测量,有些产品会在z轴方向也安装水听器,形成立体基阵,当然这样做又会导致基阵体积有所增大。此外,垂直角的测定受声速的影响特别大,因此更为直接的改善方法是在应答器中安装深度传感器获取深度h。理论上,仅通过水平角和深度也可以计算应答器位置,而且观测者并不需要知道发射时刻,而只需要被动接听即可,这样更容易工程实现,适用于某些无源定位的场合。其位置为:
但为了保证精度,在没有特别要求的情况下,水平角、斜距和深度被认为是需要同时具备的3个基本的测定参数。
⒊误差分析与精度提升
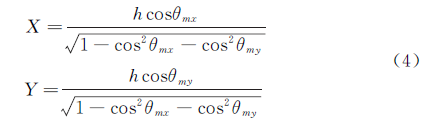
对式(3)进行全微分,以斜距相对均方误差δ2=σ2/R2 表示定位精度,可得:
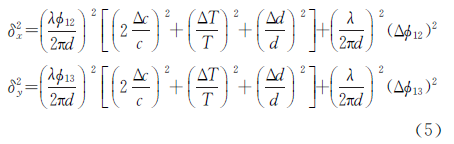
式(5)表明,应答器越靠近船正下方,定位精度越高。因此,超短基线定位系统的工作范围一般在基阵下方一定的锥角区域内。同时,定位精度还与斜距测定误差、声速测定误差以及水听器基阵接收信号的时间间隔测定误差等有关。
因此,提高超短基线定位系统精度的措施有:①采用较低频率和宽带信号,提高信噪比;②增加基元间距,优化基阵结构;③对声速变化和声线弯曲进行有效的误差建模估计和补偿。
超短基线定位技术在民用和军事两大领域都有广泛的应用。民用范围内,海底勘测、海洋调查、潜水员作业、水下打捞、水下工程等都需要水声定位提供支持;军事范围内则包含蛙人活动、潜艇航行、AUV回收、蛟龙号深海探测、协同定位、敌舰探测等应用。
⒈海洋勘探
随着陆上油气资源逐渐紧张,海洋油气勘探日益成为国内外油气开发的重点领域。拖缆和海底电缆(OBC)地震勘探技术是海洋油气勘探的重要技术手段。
拖缆和海底电缆广泛使用水声定位技术定位水听器位置,提高勘探数据质量。OBC地震勘探技术利用安装有水听器的海底电缆或拖缆接收地震波数据。在实际施工中,由于受到海流、潮汐等因素影响,水听器实际位置相对水面实测位置将发生较大位移,最大位移可超过30m。海底地震勘探电缆漂移产生的时差,严重降低了地震资料的成像精度,因此OBC地震勘探必须对沉入海底位置相对稳定的水听器进行精确定位。水声定位方法具有高速度、高精度、低成本的优势,成为OBC地震勘探水听器二次定位的重要手段。
⒉海洋科学
ROV/AUV等水下潜器被广泛应用于生物、矿石的采样,以及海底环境信息采集与地形扫面勘探之中。这些潜水器及水下平台在释放回收等升降过程和水下航行过程中都需要水声定位保证位置信息。著名的马航失事飞机的搜索打捞作业也运用了很多水声定位技术,水声定位系统可检测引导ROV/AUV的行进路线并进行探索,也可确定黑匣子的位置。
以远程操作潜水器和蛟龙号为代表的载人潜水器更需要利用水声定位系统进行精确定位和导航,从而引导这些作业工具安全到达指定位置,完成作业。我国蛟龙号载人潜水器的水下定位要依靠2套水声定位系统,即超短基线和长基线定位系统。
⒊电缆管道铺设
在20世纪70年代,随着大型海洋油气田的开发,建设了大型海洋油气管道,把开采的油气直接输往陆上油气库站。海上风力发电也成为新能源中的一支新兴力量。至2023年,全球海底电力电缆安装量将达304条。随着全球油气工业和风力发电向海洋进军,海底铺设的油气管道和海底电缆日益成为全球能源运输动脉的重要组成部分。
水声定位系统主要用于海底管道连接定位、管道维修引导、电缆操作指导及海底电缆定位,在钻井船和浮式平台等海洋工程装备中得到广泛应用。深海海洋石油开采时,深水区域的管线测量一般使用水面支持船安装超短基线对沿管线行进的ROV 进行实时定位。
⒋水下考古
水下考古发掘是对考古学由陆地田野考古向水域的延伸。由于自然灾害和航运事故,一些航线下还保存着大量沉船和文物。沉船打捞、事故救援和水下考古常配备多种水声器材,包括多波束水下声呐、浅地层剖面仪、旁侧声呐、超短基线系统和水下机器人等。
工作时超短基线换能器采用法兰盘刚性安装并浸入水中,潜水员或水下机器人将应答器放置在目标上便可确定打捞目标位置。我国附近海域探明的水下遗址就有多处,2007年南海I号整体浮出水面,世界首创的整体打捞古沉船方式取得成功。GAPS超短基线定位系统成功应用于本次打捞工作中。
⒌军事活动
水下军事活动对海军装备水下定位系统提出了较高的要求。以潜艇为例,在远洋长时间执行任务要求保持较高的定位精度,频繁地上浮容易暴露自身的位置。此外,水下无人作战平台、蛙人作战设备等也都需要水声定位辅助导航。通过惯性/水声的组合导航技术是当前的主要手段,而多普勒测速和声呐计程仪也可以辅助进行校准。
利用水声定位及惯性导航的组合定位系统可对水下各类有人或无人潜器进行定位及导航,配合多波束声呐、侧扫声呐、合成孔径声呐等可探测敌方水下军事基地的三维地图和精确位置。组合导航无人潜器搭载探测及干扰声呐还可以完成收集舰艇声呐数据、探测港口军事部署、监控舰艇运行状态和进行声呐电子对抗等多种作业。
从20世纪70年代开始,随着海洋勘探行业的兴起,长基线、短基线和超短基线等水声定位系统开始出现。20世纪80年代,军事上对水下定位的需求更为迫切,水声定位技术得到进一步发展。以欧洲为代表的西方国家在超短基线等水声定位方面起步较早,其中挪威的Kongsberg、法国的IXBlue、英国的Sonardyne堪称该领域的3只领头羊,他们拥有20~40年的研发经验。相比之下,国内在水声定位方面的研究基础还较为薄弱。涉及核心技术,国内外有关超短基线公开的资料较少,下面对目前能够已知的相关设备的资料进行一些整理和介绍。
⒈国外研究现状
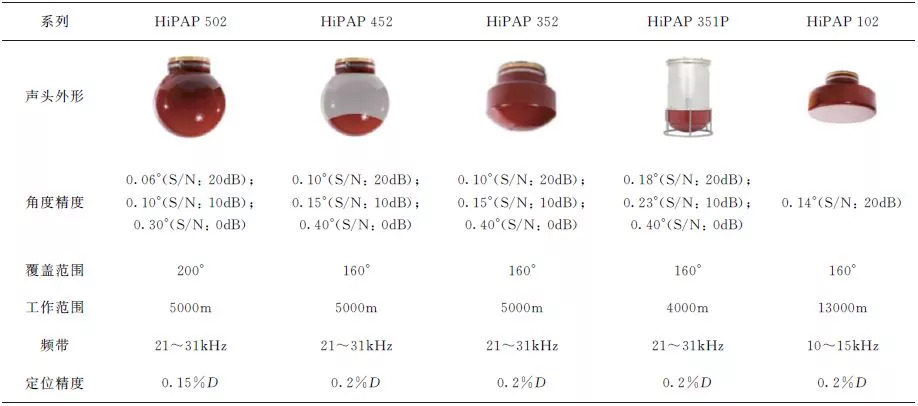
挪威Kongsberg公司于1996年开始推出第一代超短基线,新近推出的HiPAP700,作用水深达到了10000m,测距精度优于0.5m。目前在售的主要有HiPAP和μPAP这2个系列,HiPAP主要用于深水和海底勘测领域,主要包括HiPAP502、HiPAP452、HiPAP352、HiPAP351P-Series、HiPAP102五款型号,性能参数如表2所示,表中D 为斜距。多通道球面阵列是HiPAP系列的主要特征,其通道数量高达300个。这些探测通道选择性地开启,具有良好的波束指向性。
表2 HiPAP系列超短基线定位产品的部分参数
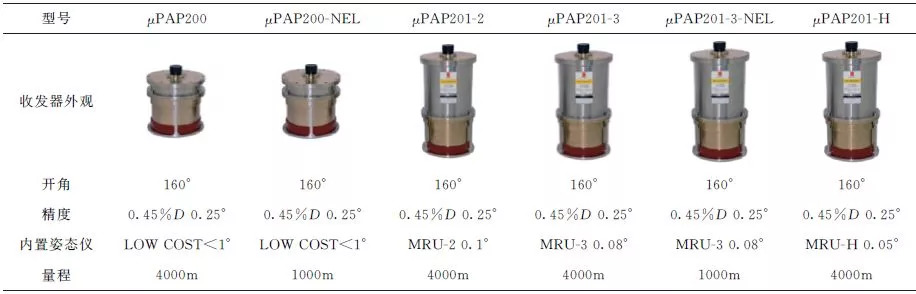
μPAP主要用于浅水领域,并且部分型号内置有姿态传感器,在售的换能器型号主要有μPAP200、μPAP200-NEL、μPAP201-2、μPAP201-3、μPAP201-3-NEL、μPAP201-H,性能参数如表3所示。
表3 μPAP系列超短基线定位产品的部分参数
法国IXBlue公司主要有两种型号的超短基线产品:Posidonia-USBL(图8)和GAPS-USBL (图9)。IXBlue产品最鲜明的特点是立体性强的四脚外形,通过简单的结构达到了高水准的性能。Posidonia-USBL是一款长程超短基线型号,最大作用距离10000m,工作深度可达到600m,在该水深处的最高定位精度能达到0.2%D ,询问频段为8~14kHz,应答频段为14~18kHz,该系统已经成功推向市场。另外,据悉其中的一款型号也集成了惯性组件,形成一体化系统。

图8 Posidonia-USBL系列产品外观图

图9 GAPS-USBL系列产品外观图
GAPS-USBL是IXBlue公司推出的新型超短基线系统,最大的特征是集成了声学定位系统、高精度惯性导航系统和GPS定位系统,从而在使用前免去了超短基线设备和惯导器件之间进行安装误差的校准步骤,进一步降低了定位系统误差源的影响。GAPS-USBL的作用距离为4000m,工作深度25m,覆盖范围160°,定位精度(在垂直条件下信噪比>40dB)达0.06%D,角度精度为0.01°,工作频段为20~30kHz。
英国Sonardyne公司开发了2个系列的超短基线定位系统:Scout-USBL和Ranger-USBL(图10)。Scout-USBL是该公司的高频产品,适用于浅水工作,系统小巧易于使用,工作频段为35~55kHz,覆盖范围为180°。采用内部姿态传感器的精度为2.75%D ,使用内置姿态传感器和罗经时定位精度可达到0.5%D 。该系列又分为Scout、ScoutPlus和ScoutPro三种型号,前2款的作用距离为500m,Pro的距离达到1000m,而跟踪目标数量依次为4个、6个、10个。

图10 Scout-USBL(左)和Ranger1-USBL(右)
Ranger-USBL是该公司主打的一款中频系列,适用范围从浅水到深水均可。一代Ranger工作频段为18~36kHz,作用距离6000m。在使用单频信号的情况下斜距测量精度为0.2m,而在宽带信号工作条件下斜距测量精度可达到0.03m,定位精度为0.1%D。一代目前已退出市场,取而代之的是新一代的Ranger2和Mini-Ranger2,前者作用距离超过7000m,后者主要服务于1000m 内的近海区域。Ranger2系列中还有多款型号集成了内置姿态/惯性传感器,能够免校准输出高精度定位结果。此外,Ranger-USBL还使用了宽带技术,可以提供传输速率高达1500bit/s的水声通信服务。表4所示为Ranger2系列的多款声头性能参数。
表4 Ranger2系列超短基线声头的部分参数

英国Nautronix公司的NASDrill-USBL 是针对近岸钻井等需要在高噪声的恶劣环境下的海洋资源开发推出的声学定位系统。该系统的作用距离为4500m,精度可达0.5%D ,刷新率为1Hz,工作开角为60°~120°。
英国AAE 公司生产的EasyTrak超短基线水下定位系统(图11)采用中频波段,内置了Pitch/Roll/Heading等运动传感器,支持接收GPS数据,同步跟踪多个水下目标。根据不同的系统精度,系统包含3个型号:EasytrakAlpha、EasytrakLite、EasytrakNexus,其斜距分辨率为0.1m,覆盖范围160°,定位精度分别为:3.5%D (2°)、2.5%D(1.4°)、1.0%D (0.6°)。

图11 EasyTrak产品外观图
英国的Blueprint公司推出了一款Subsea超短基线产品(图12),只有16cm 高,是目前世界上尺寸最小的超短基线设备,该设备工作频率为24~32kHz,作用距离1000m,定位精度1.5%D ,并且内置有MEMS陀螺仪和加速度计。

图12 Subsea产品外观图
美国的EdgeTech前身为OREOffshore公司,生产高精度声学定位、导航、控制产品。其推出的BATS(BroadbandAcousticTrackingSystem)(图13)绝对水平精度为0.5%D(RMS),可重复精度为0.3%(RMS),测距精度为0.3m(RMS)。工作频率16~30kHz,可追踪4个目标,最大作用距离3300m。ORE 时代的产品为TrackPoint3,其性能指标与BATS差不多。

图13 BATS产品外观图
美国LinkQuest公司的TrackLink1500系列产品(图14)集成了超短基线声学定位系统和高速水声通信系统。TrackLink1500系列中使用了LinkQuest公司极力推广的BASS 宽带声学扩谱技术。Track-Link1500系列工作频率为31~43.2kHz,其定位精度按照高频至低频分为三档:0.5%D (0.25°)、2%D (1°)和5%D (3°),斜距测量精度为0.2m。该系列产品最大的作用距离为1000m,而且还能够同时追踪8~16个目标。

图14 TrackLink1500产品外观图
此外,美国的AUSS先进无人搜索系统、韩国的OKPL-6000设有长基线水声定位系统,美国的Odyssey、REMUS-100航行器设有长基线和超短基线水声定位系统,挪威的Hugin3000、法国的Alister3000设有短基线水声定位系统。加拿大ISE公司的AUV应用了TrackLink5000超短基线水声定位系统,美国克洛希德·马丁公司应用了TrackLink1500超短基线水声定位系统导引和回收AUV。
⒉国内研究现状
国内在长基线、短基线和超短基线水声定位技术方面虽然起步较晚,但近年来也取得了很大的进步。哈尔滨工程大学研制的GRAT系统是比较典型的长基线定位系统之一。东南大学研制的YTM鱼雷弹道测量系统、哈尔滨工程大学研制的MDT系统等均是典型的短基线定位系统。中国科学院声学研究所、厦门大学等在声学定位技术领域也都进行了一定的研究。
中国的水下DGPS高精度定位系统是一套集成GPS、长基线定位系统的高精度水下定位系统。这是继美国、法国之后我国率先利用GPS技术实现了水下高精度的自主导航。超短基线定位技术同样已经达到了应用阶段,可以推广进行产业化,目前已装备了大洋一号船、科学号船和向阳红09号船,在执行科考任务中发挥了重要的作用。长基线技术方面开展了海洋6号船上的应用性研究,预计近期可进行自有技术的验证。综合定位系统技术的关键技术攻关已完成,未来将会应用于4500m国产化载人潜水器。
哈尔滨工程大学从2002年开始进行相关研究,2006年成功研发国内首台深海超短基线定位系统样机,2012年成功研发国内首台工程样机,2013年成功研发国内首台定位系统产品。其中共研制出四种超短基线定位系统:深水重潜装潜水员超短基线定位系统、探索者号水下机器人超短基线定位系统、灭雷具配套水声跟踪定位装置和长程超短基线定位系统。前两种均是简易系统,仅用于近程的特殊使用场合。第三种是型号产品,其显著优点是浅海定位性能优良,即使对于水平方向(目标俯仰角为0°)的目标,定位精度仍优于3%D ,浅海作用距离达到3000m,可实时给出3个目标的轨迹。长程超短机械定位系统如图15所示,其作用距离达到8000m,应答器工作水深达到7000m,最高定位精度达到0.2%D (基阵下方±15°开角),测距精度0.15m,综合定位精度1m。相关设备在蛟龙号和向阳红09号船上进行了试验。

图15 长程超短基线定位系统
中国科学院声学研究所东海研究站又名上海声学实验室,始建于1960年,隶属于中国科学院声学研究所。东海研究站主要从事水声导航技术、水声定位技术、水声探测技术、超声应用技术、数字通信及信息处理技术和医疗声学技术等领域的研究和开发。其研究的超短基线定位设备分为低频、中频和高频3个频段,可以同时对多个信标进行跟踪定位。作用距离为6000m,测距精度优于0.1m+0.1%D,定位精度为0.1m+0.5%D。
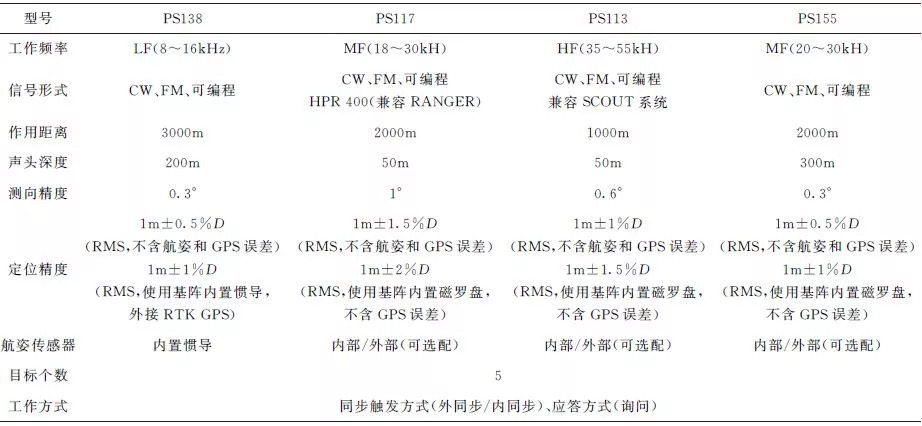
嘉兴中科声学科技有限公司(中科院声学所嘉兴工程中心)成立于2007年9月,由中国科学院声学研究所嘉兴工程中心核心技术团队与嘉兴科技城投资公司共同出资创建[22]。其生产的超短基线系统可兼容多种国外同类产品信号体制,主要有PS138、PS117、PS113和PS155这4个型号,并可按要求内置姿态传感器(图16)。其中PS138为与中船重工707所联合研制,集成了惯性导航设备,具体性能如表5所示。

图16 中科声学科技相关产品外观图
表5 中科声学科技主要型号性能参数
嘉兴易声电子科技有限公司核心研发人员出自于嘉兴中科声学科技有限公司,主要研发小型100m以内浅水超短基线水下定位系统,目前已经与国内主流生产ROV 的厂家建立了联系。最大优势是体积小巧、价格低。其eSTS系列产品的作用距离为800m,精度为1.0%D。

图17 iTrack-UB1000外观图
中海达下属的海洋信息技术有限公司推出的基于水声宽带扩频技术和高精度时间同步技术的便携式超短基线水下定位系统,目前有2款型号:iTrack-UB1000(图17)和iTrack-UB3000。该系统融入了高精度差分RTK-GPS定位技术,可满足各种高精度的水下定位导航应用的需求,可同时对5个水下目标进行精确定位,具体性能如表6所示。
表6 iTrack-UB系列性能参数
型号 |
iTrack-UB1000 |
iTrack-UB3000 |
量程 |
1500m |
3000m |
定位精度 |
0.5m+1.2%D |
0.5m+1%D |
工作频率 |
20~28kHz |
15~25kHz |
质量 |
30kg |
12kg |
定位间隔 |
1.5s |
1.5s |
综上所述,本领域中国内和国外目前还存在较大差距,通过同类产品比较可以发现,国外大多已是成熟产品推广市场,标志着其技术已相对成熟,而国内多为科研样机。性能参数上,国外产品作用距离更大,定位精度更高,并且都能够内置姿态仪罗经或者惯性导航系统,已实现惯性/水声一体化。而国内在长距离、高精度定位方面还有待加强,面对水下环境中的诸多实际问题,还有很多技术难点需要攻克。
随着水声技术的提高,一些超短基线定位系统的性能向着长基线、短基线定位系统靠近,在许多指标要求并不苛刻的场合,超短基线定位系统的便利优势更加凸显。水声技术的发展很大程度上依赖着数据和经验的积累,国外诸多老牌企业都具有几十年的行业背景,相关产品经历了几代升级,不仅产品性能可靠超前,而且具有一系列型号,实现了产业化,占据着全球水下定位导航行业的市场。我国超短基线定位研究起步晚,同国外还存在较大的差距,不仅性能和可靠性落后,国内相关研究单位和型号寥寥可数,且未能实现完全国产化。针对我国超短基线定位技术发展,主要可以从如下4个方向进行研究。
⒈提高水声定位性能
目前国内水声定位的短板主要存在于传感器部分,如质量、尺寸、耐压性、量程、信噪比、器件测量精度等方面。一方面需要突破材料,选用更轻更耐压的材料,在保护声头传感器的同时具有较高的声波穿透性和环境噪声的抑制性;另一方面,采用更低频的信号才能达到更远的传播距离,衰减后的低频信号更容易被海洋背景噪声干扰,因此增大信噪比、量程和精度要求更高的器件工艺,是有效的降噪滤波手段。水下环境复杂多变,其中多径效应和声线弯曲是最大的干扰,如何克服其带来的影响是关键。此外,宽带扩频信号具有作用范围广、抗干扰强等优点,非常适合水声通信与定位,国外已成功应用并广泛推广,因此未来水声定位是必然的发展方向。
⒉惯导结合的一体化设备
超短基线定位系统需要MRU和电罗经提供姿态和船艏方向。由于在载体上的安装位置不同,这就需要在每次使用前对安装误差角进行标定,不仅复杂而且增加了外设数量。以挪威、法国和英国的三家巨头企业为代表生产的一体化产品成为该方向的发展走势。将高精度惯性组件集成到超短基线中,不仅可以为超短基线定位实时提供高精度姿态,还可以输出惯性导航结果,高速率的惯导输出结果弥补了水声较低的刷新率,超短基线的定位结果又可以周期性地对惯导的累积误差进行重调。从整体上看,一体化系统省去了外部设备,能够独立完成水下定位任务。安装误差在出厂时就进行了精确校正,使用时不需再进行相关工作,进一步提高了系统的精度、便捷性和操作性。
⒊多种方式的混合基线定位
长基线、短基线和超短基线随着在定义中有着各自的特点,但影响在使用过程中的相互融合。当超短基线声头在布有基阵的海域分别与多个应答器配合工作时,既可以由超短基线原理来定位也可以由长基线原理来定位,冗余信息将会在各自的基础上进一步提升效果,这就是L/USBL。当超短基线声头在多个位置对单个应答器进行测量时,如果各位置已知,则也可以构成L/USBL。同理,若多台超短基线设备固定于船体前后同时工作,则可构成S/USBL,而L/S/USBL 也是可以实现的。此外,在一些特定的应用条件下,结合GPS、惯导、深度计、多普勒仪或是拖曳电缆等设备,超短基线还可以在有源和无源模式之间选择,使用方式更加灵活多变。
⒋高速水声通信服务
水声定位由最初的单频信号朝着宽带扩频信号发展,水声通信技术发展了几十年,如今也在宽带扩频领域中找到了和定位技术结合的契机。未来水声定位技术和水声通信技术将日趋成熟,两者的结合天衣无缝,也是大势所趋。水声信号中将包含一段报文信息,同时又将被用于测时定位,这就涉及信号检测、时延精确提取、报文解析以及高速传输等关键技术。目前国外生产商新一代的升级方向更加注重高速水声通信,水下节点间的水文位置等信息在高速通信技术的支持下可以相互传输,有利于进一步提高性能,并使得系统的工作方式也更加的灵活方便。宽带信号体制还允许接入更多的目标,以满足水下大区域密集任务小区协同工作。
【作者简介】金博楠 徐晓苏 张涛 孙晓俊,分别来自微惯性仪表与先进导航技术教育部重点实验室和东南大学仪器科学与工程学院。
第一作者金博楠,1990年出生,男,博士研究生,研究方向为惯性导航水声定位.
通信作者徐晓苏,1961年出生,男,博士生导师,主要从事测控技术与导航定位领域的研究。本文为基金项目,来自国家自然科学基金项目(51175082,61473085);文章刊发于《导航定位与授时》(2018年4期),参考文献略,用于学习与交流,版权归作者及出版社共同拥有。





