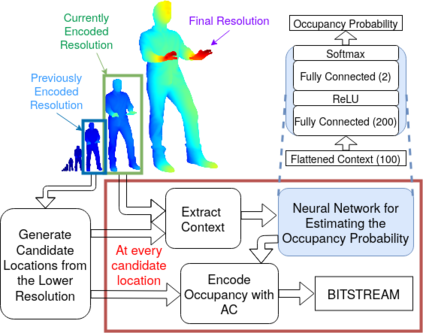
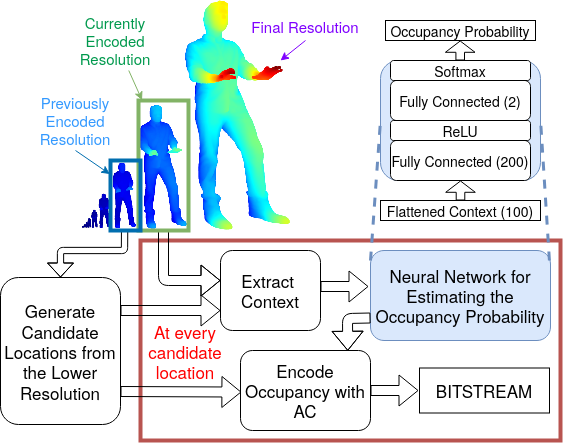
This paper describes a novel lossless point cloud compression algorithm that uses a neural network for estimating the coding probabilities for the occupancy status of voxels, depending on wide three dimensional contexts around the voxel to be encoded. The point cloud is represented as an octree, with each resolution layer being sequentially encoded and decoded using arithmetic coding, starting from the lowest resolution, until the final resolution is reached. The occupancy probability of each voxel of the splitting pattern at each node of the octree is modeled by a neural network, having at its input the already encoded occupancy status of several octree nodes (belonging to the past and current resolutions), corresponding to a 3D context surrounding the node to be encoded. The algorithm has a fast and a slow version, the fast version selecting differently several voxels of the context, which allows an increased parallelization by sending larger batches of templates to be estimated by the neural network, at both encoder and decoder. The proposed algorithms yield state-of-the-art results on benchmark datasets. The implementation will be made available at https://github.com/marmus12/nnctx
翻译:本文描述一个新的无损点云压缩算法,该算法使用神经网络来估计 voxel 占用状态的编码概率,这取决于要编码的 voxel 周围的广度三维背景。 点云代表为环形树, 每个分辨率层都使用从最低分辨率开始的算术编码进行顺序编码和解码, 从最低分辨率开始, 到最后分辨率达到为止。 环形树每个节点的分解模式的每个 voxel 的占用概率由神经网络模拟, 输入数个环形节点( 属于过去和当前分辨率) 已经编码的占用状态, 与要编码的节点对应的 3D 环境。 该算法有一个快速和缓慢的版本, 快速选择了不同背景的数个 voxel, 从而可以通过发送更多的模板来增加平行化, 由神经网络在 encoder 和 decoder 进行估算。 拟议的算法将在基准数据设置上产生状态- art 的结果 。