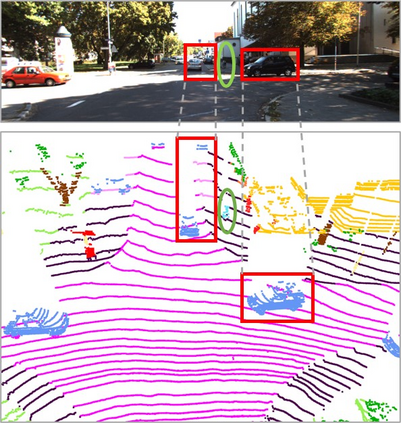
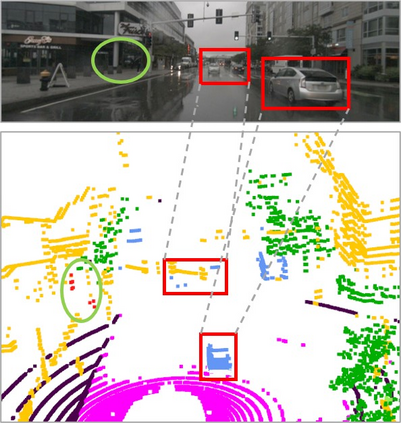
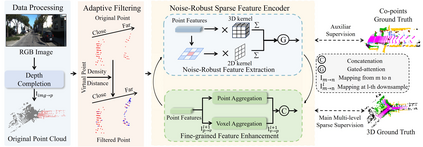
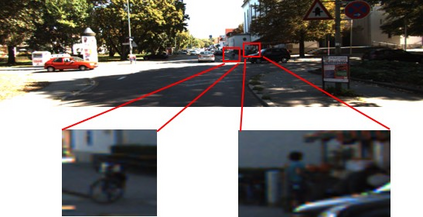
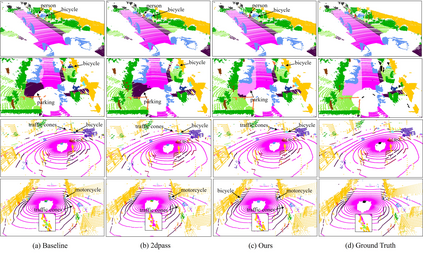
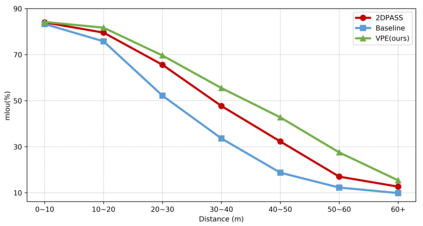
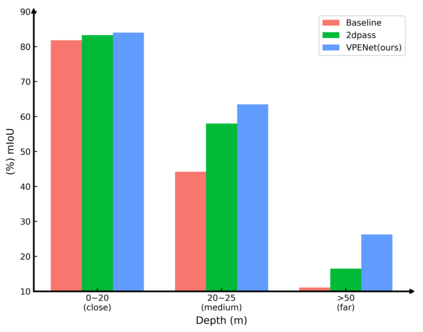
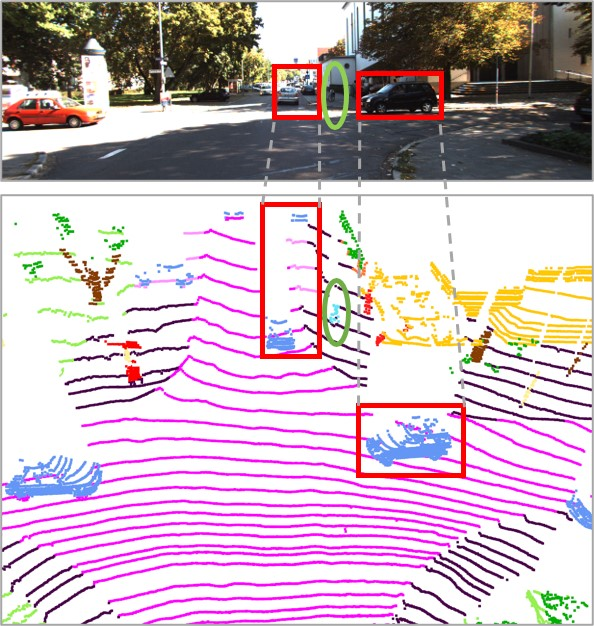
LiDAR-based 3D point cloud recognition has been proven beneficial in various applications. However, the sparsity and varying density pose a significant challenge in capturing intricate details of objects, particularly for medium-range and small targets. Therefore, we propose a multi-modal point cloud semantic segmentation method based on Virtual Point Enhancement (VPE), which integrates virtual points generated from images to address these issues. These virtual points are dense but noisy, and directly incorporating them can increase computational burden and degrade performance. Therefore, we introduce a spatial difference-driven adaptive filtering module that selectively extracts valuable pseudo points from these virtual points based on density and distance, enhancing the density of medium-range targets. Subsequently, we propose a noise-robust sparse feature encoder that incorporates noise-robust feature extraction and fine-grained feature enhancement. Noise-robust feature extraction exploits the 2D image space to reduce the impact of noisy points, while fine-grained feature enhancement boosts sparse geometric features through inner-voxel neighborhood point aggregation and downsampled voxel aggregation. The results on the SemanticKITTI and nuScenes, two large-scale benchmark data sets, have validated effectiveness, significantly improving 2.89\% mIoU with the introduction of 7.7\% virtual points on nuScenes.
翻译:暂无翻译