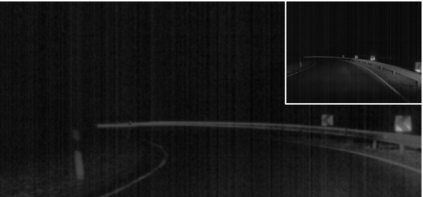
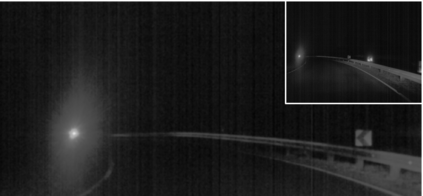
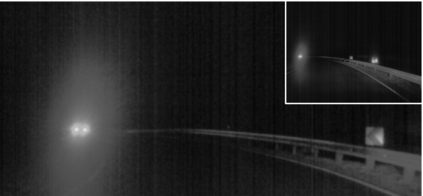
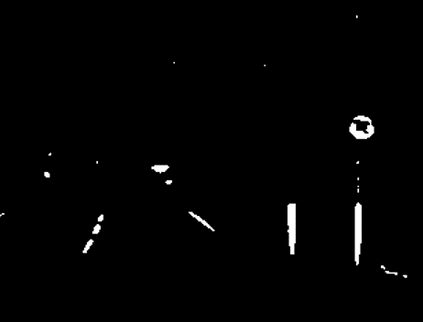
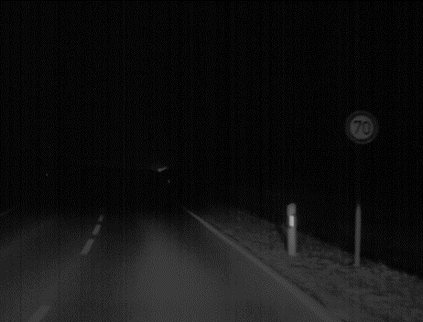
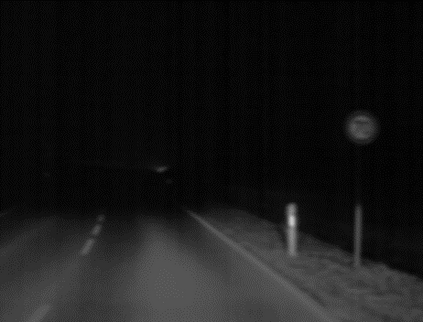
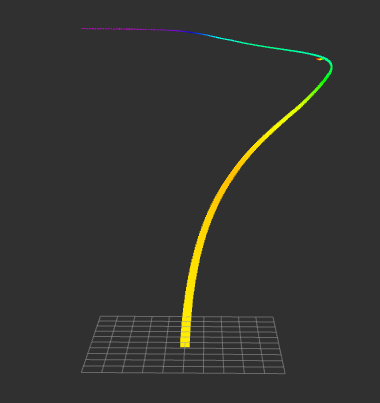
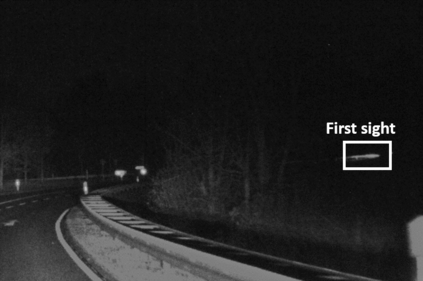
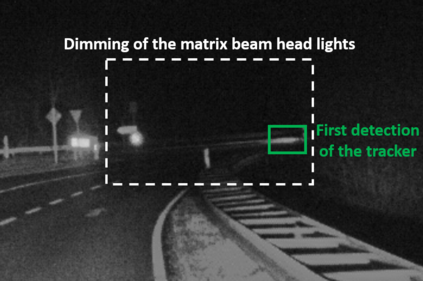
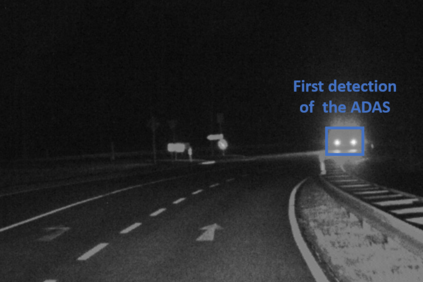
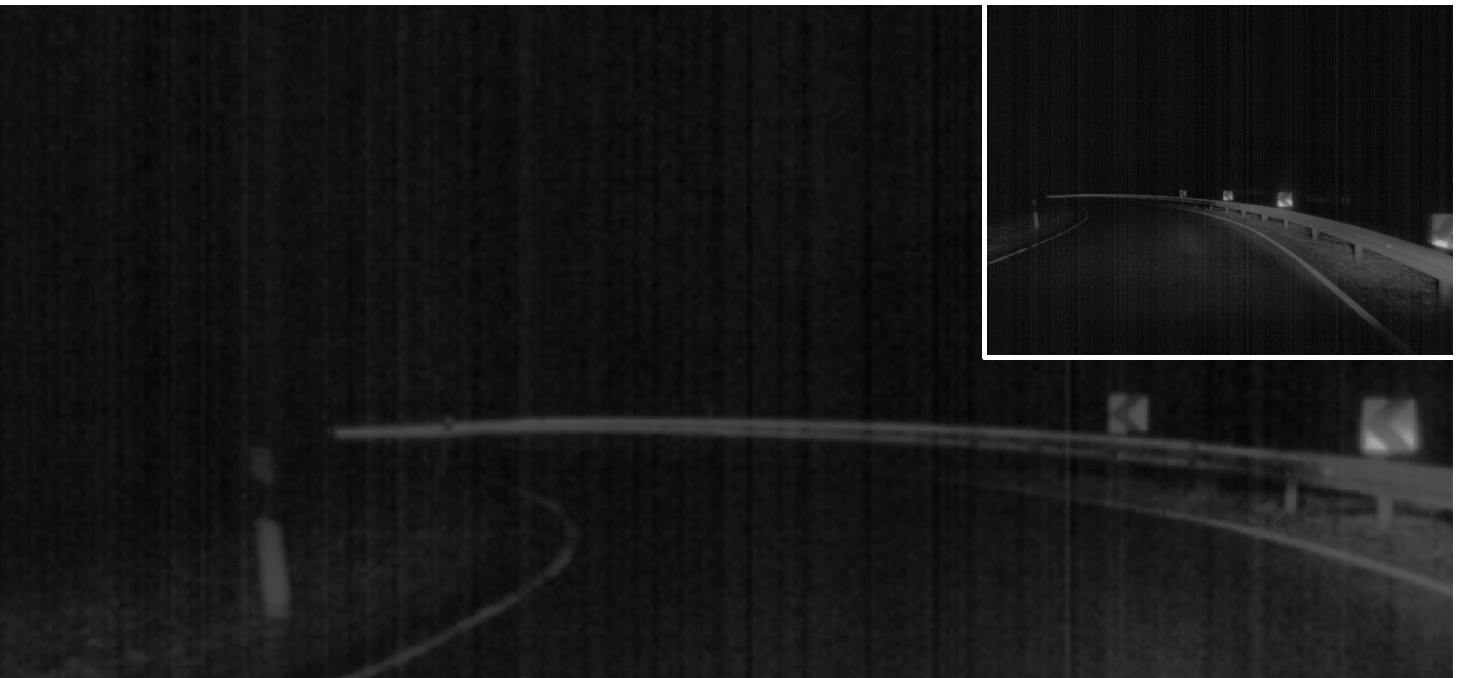
In recent years, computer vision algorithms have become more and more powerful, which enabled technologies such as autonomous driving to evolve with rapid pace. However, current algorithms mainly share one limitation: They rely on directly visible objects. This is a major drawback compared to human behavior, where indirect visual cues caused by the actual object (e.g., shadows) are already used intuitively to retrieve information or anticipate occurring objects. While driving at night, this performance deficit becomes even more obvious: Humans already process the light artifacts caused by oncoming vehicles to assume their future appearance, whereas current object detection systems rely on the oncoming vehicle's direct visibility. Based on previous work in this subject, we present with this paper a complete system capable of solving the task to providently detect oncoming vehicles at nighttime based on their caused light artifacts. For that, we outline the full algorithm architecture ranging from the detection of light artifacts in the image space, localizing the objects in the three-dimensional space, and verifying the objects over time. To demonstrate the applicability, we deploy the system in a test vehicle and use the information of providently detected vehicles to control the glare-free high beam system proactively. Using this experimental setting, we quantify the time benefit that the provident vehicle detection system provides compared to an in-production computer vision system. Additionally, the glare-free high beam use case provides a real-time and real-world visualization interface of the detection results. With this contribution, we want to put awareness on the unconventional sensing task of provident object detection and further close the performance gap between human behavior and computer vision algorithms in order to bring autonomous and automated driving a step forward.
翻译:近年来,计算机视觉算法越来越强大,使得自动驾驶等技术能够快速发展。然而,目前的算法主要有一个共同的限制:它们依赖直接可见的物体。与人类行为相比,这是一个重大的缺点,因为与实际物体(例如影子)造成的间接视觉提示相比,实际物体(例如影子)已经直觉地用来检索信息或预测正在发生的物体。在夜间开车时,这种性能缺陷变得更加明显:人类已经处理过由即将到来的车辆所引发的光制品,以显示其未来外观,而当前物体探测系统则依靠即将到来的车辆的直接可见度。根据以前在这一主题上的工作,我们向本文展示了一个完整的系统,能够解决根据实际物体(例如影子)造成的光性能信号在夜间对车辆的移动进行随机探测的任务。为此,我们概述了从在图像空间中探测光制品、将物体定位在三维空间中进行本地化,以及核查物体的时间间隔期间。为了展示其适用性能,我们把系统安装在不相近的车辆的可见性能识别能力上,并使用提供提供提供提供提供提供提供提供提供提供性稳定性计算机感应感应的自动感测结果的系统,从而进行精确的感测结果。