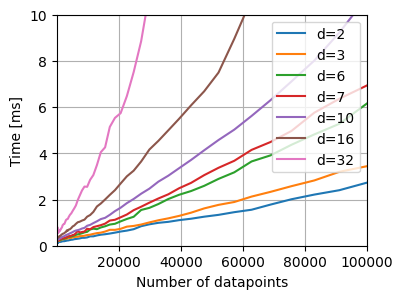
Humans are remarkable at navigating and moving through dynamic and complex spaces, such as crowded streets. For robots to do the same, it is crucial that they are endowed with highly reactive obstacle avoidance robust to partial and poor sensing. We address the issue of enabling obstacle avoidance based on sparse and asynchronous perception. The proposed control scheme combines a high-level input command provided by either a planner or a human operator with fast reactive obstacle avoidance. The sampling-based sensor data can be combined with an analytical reconstruction of the obstacles for real-time collision avoidance. We can ensure that the agent does not get stuck when a feasible path exists between obstacles. The algorithm was evaluated experimentally on static laser data from cluttered, indoor office environments. Additionally, it was used in a shared control mode in a dynamic and complex outdoor environment in the center of Lausanne. The proposed control scheme successfully avoided collisions in both scenarios. During the experiments, the controller on the onboard computer took 1 millisecond to evaluate over 30000 data points.
翻译:人类在动态和复杂空间(如拥挤的街道)的航行和移动方面是非凡的。对于机器人来说,同样重要的是,机器人拥有高度反应障碍,能够避免局部和低度感知。我们处理基于稀少和无同步感知的有利障碍避免问题。拟议的控制方案将规划者或快速反应障碍避免的操作者提供的高级输入指令结合起来。基于取样的传感器数据可以与实时避免碰撞障碍的分析重建相结合。我们可以确保代理商不会在障碍之间的可行路径存在时被卡住。算法是用来自封闭式室内办公室环境的静态激光数据进行实验评估的。此外,它是在洛桑市中心一个动态和复杂的室外环境中用于共同控制模式的。拟议的控制方案成功地避免了两种情况下的碰撞。在实验期间,机上计算机上的控制员花了1毫秒的时间来评估超过3万个数据点。