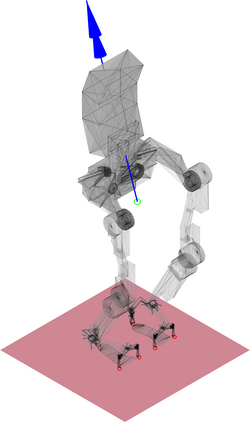
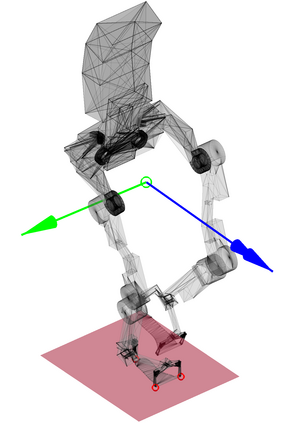
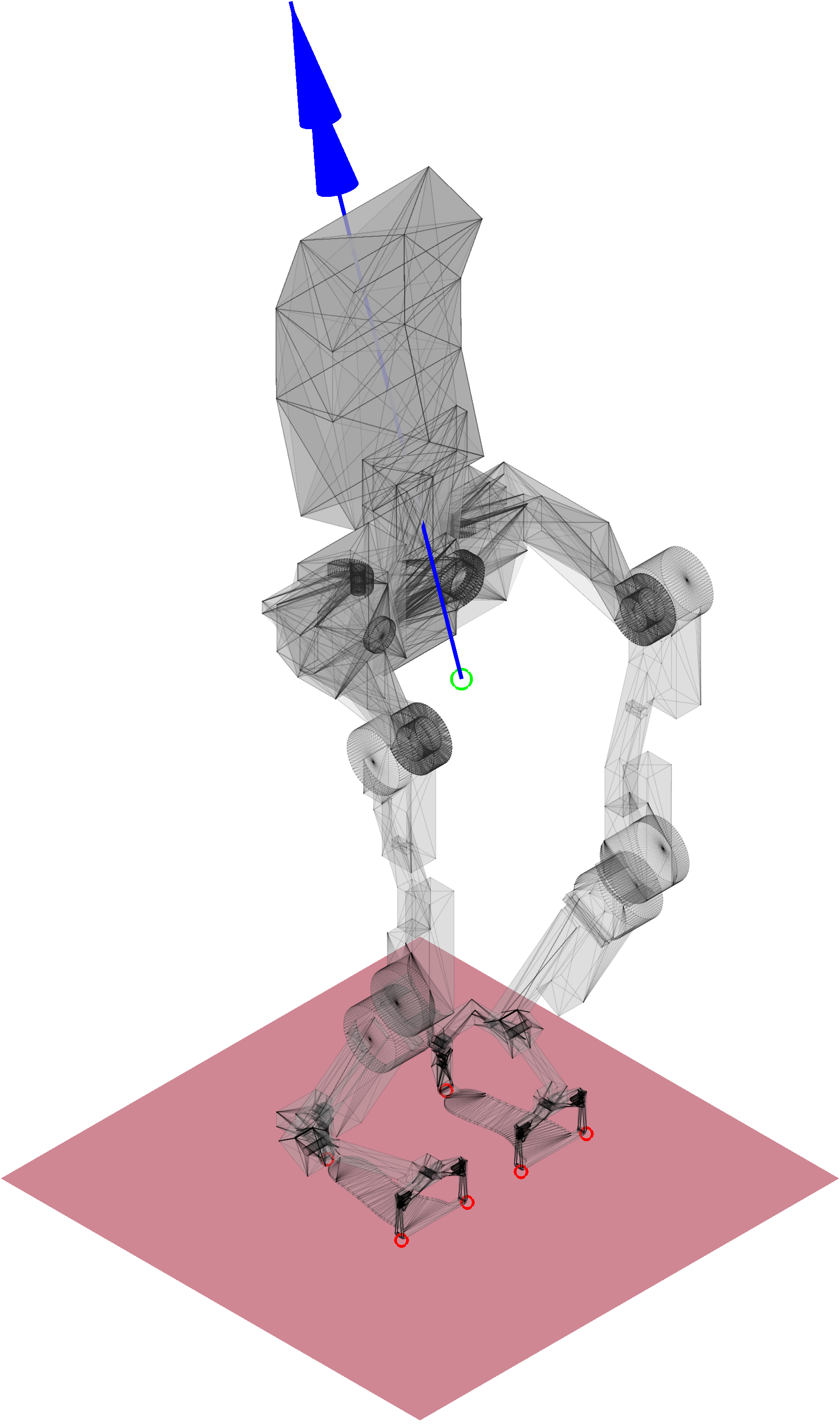
During locomotion, legged robots interact with the ground by sequentially establishing and breaking contact. The interaction wrenches that arise from contact are used to steer the robot's Center of Mass (CoM) and reject perturbations that make the system deviate from the desired trajectory and often make them fall. The feasibility of a given control target (desired CoM wrench or acceleration) is conditioned by the contact point distribution, ground friction, and actuation limits. In this work, we develop an algorithm to compute the set of feasible wrenches that a legged robot can exert on its CoM through contact. The presented method can be used with any amount of non-coplanar contacts and takes into account actuation limits and limitations based on an inelastic contact model with Coulomb friction. This is exemplified with a planar biped model standing with the feet at different heights. Exploiting assumptions from the contact model, we explain how to compute the set of wrenches that are feasible on the CoM when the contacts remain in position as well as the ones that are feasible when some of the contacts are broken. Therefore, this algorithm can be used to assess whether a switch in contact configuration is feasible while achieving a given control task. Furthermore, the method can be used to identify the directions in which the system is not actuated (i.e. a wrench cannot be exerted in those directions). We show how having a joint be actuated or passive can change the non-actuated wrench directions of a robot at a given pose using a spatial model of a lower-extremity exoskeleton. Therefore, this algorithm is also a useful tool for the design phase of the system. This work presents a useful tool for the control and design of legged systems that extends on the current state of the art.
翻译:在滚动期间, 腿上的机器人通过按顺序建立和断开接触与地面互动。 接触产生的交互扳手用于引导机器人的 Mass 中心( COM), 并拒绝使系统偏离预期轨迹并经常使其跌落的扰动。 特定控制目标( 需要的 CoM 扳手或加速) 的可行性取决于联络点分布、 地面摩擦和动作限制 。 这项工作中, 我们开发一种算法, 以计算一组可行的被动扳手, 使一个弯曲的机器人可以通过接触来影响其 CoM 。 所提出的方法可以使用任何数量的非机械接触来使用, 并使用基于无弹性接触模型的操作限制和限制来让系统偏离所需的轨迹轨迹 。 使用一个平面模型和脚站在不同高度上 。 使用接触模型的假设, 我们解释如何在接触时在COM 上计算一套有用的电动扳手法, 以及当接触的某些不可行时, 使用非腿的操作方法可以使用。 因此, 使用一个不易变换的动作的动作, 将显示一个系统的设计方向。 将显示一个手法 。 显示一个系统在操作中, 显示一个可变动的动作 方向。 如何 。 。 。 使用一个动作 。 。 将一个动作 将一个动作 显示一个动作 显示一个可变式 操作 显示一个操作 。 。 。 。 操作 操作 。